ukf专题

【逐行注释】MATLAB下的UKF(无迹卡尔曼滤波),带丰富的中文注释,可直接复制到MATLAB上运行,无需下载
文章目录 程序组成部分完整代码运行结果主要模块解读:运动模型绘图部分误差统计特性输出 程序组成部分 由模型初始化、运动模型、UKF主体部分、绘图代码和输出部分组成: 完整代码 将下列代码复制粘贴到MATLAB里面,即可运行: % 三维状态量的UKF例程% 作者联系方式:微信matlabfilter(除前期达成一致外,付费咨询)% date: 2024-8-7/V

风速预测 | 基于MATLAB的无迹卡尔曼滤波算法UKF、SVR-UKF、ANN-Kalman等时间序列风速预测模型
基本描述 基于MATLAB的无迹卡尔曼滤波算法UKF、SVR-UKF、ANN-Kalman等时间序列风速预测模型 模型步骤 时间序列风速预测模型基于MATLAB的无迹卡尔曼滤波算法(Unscented Kalman Filter, UKF)、SVR-UKF(Support Vector Regression - Unscented Kalman Filter)和ANN-Kalman(Arti
基于PID-UKF/AUKF锂电池SOC估计
(1)对UKF进行改进,引入PID控制器 参考文献:https://doi.org/10.1155/2021/6665509 模型:Thevenin模型 电池类型:钴酸锂 工况:DST工况和FUDS工况 MATLAB版本:R2021b 在这篇参考文献的基础上,对UKF进行改进,引入PID控制思想,对锂电池SOC进行估计。整体思路和PID-EKF是一致的,换汤不换药。 关于PID-EKF/AE

无迹卡尔曼滤波(UKF)推导
pdf和图片链接: 链接:https://pan.baidu.com/s/1q8tIy1q5gqlhYEKH1l8frg 提取码:yyds 1.1概述 无迹卡尔曼滤波(Unscented Kalman Filter),最初由Julier和Uhlmann提出,使用了一种不同的方法来计算误差协方差矩阵。它不使用(连续时间)黎卡提方程(Riccati Equations,形如、 的一类非线性方程)或

SOC仿真-无迹卡尔曼UKF在电池荷电状态SOC的仿真应用
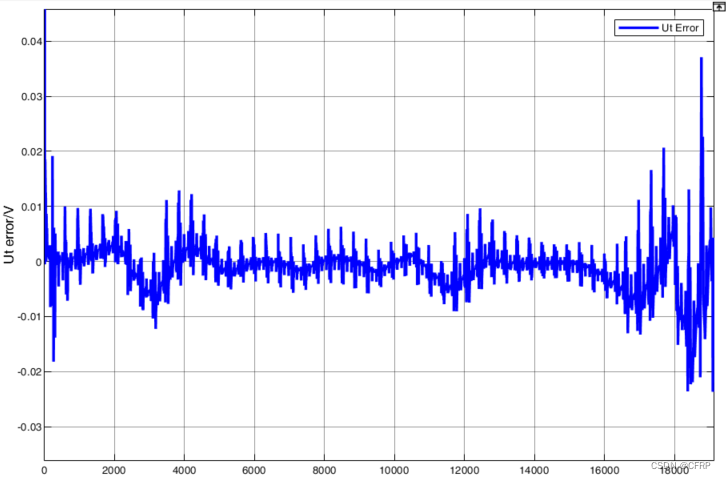
在前面得到了AFFRLS参数辨识结果,将动态的辨识参数用于SOC估算,估算方法为无迹卡尔曼滤波算法。刚开始学习不太确定自己的结果是不是正确的话,可以参考一下下面的图形。工况为FUDS工况,结果如下 估计器1为AFFRLS参数下的UKF估算,估计器2为辨识结果取平均值后的估算结果。 误差图: Q或R参数需要调试到合适的数值,曲线有高有低说明UKF有对安时积分法其修正作用。后

基于UKF无迹卡尔曼滤波的电池Soc估计matlab仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 4.1 电池模型 4.2 无迹卡尔曼滤波(UKF) 4.3 UKF在电池SoC估计中的应用 5.完整工程文件 1.课题概述 通过UKF无迹卡尔曼滤波对电池的SOC进行估计,并对比电池真实的SOC,输出两者的对比仿真结果。 2.系统仿真结果 3.核心程序与模型 版本:MAT

无迹卡尔曼滤波(Unscented Kalman Filter, UKF):理论和应用
无迹卡尔曼滤波(Unscented Kalman Filter, UKF):理论和应用 卡尔曼滤波是一种强大的状态估计方法,广泛应用于控制系统、导航、机器人等领域。然而,传统的卡尔曼滤波假设系统是线性的,而在实际应用中,许多系统具有非线性特性。为了解决这一问题,无迹卡尔曼滤波(Unscented Kalman Filter, UKF)应运而生,它通过采用无迹变换来处理非线性系统。 线性卡尔曼滤波

《卡尔曼滤波原理及应用-MATLAB仿真》程序-5.2UKF
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 功能说明: UKF在目标跟踪中的应用% 参数说明: 1、状态6维,x方向的位置、速度、加速度;% y方向的位置、速度、加速度;% 2、观测信息为距离和角度;% 详细原理介绍及中文
《卡尔曼滤波原理及应用-MATLAB仿真》程序-5.1UKF
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 无迹Kalman滤波在目标跟踪中的应用% 详细原理介绍及中文注释请参考:% 《卡尔曼滤波原理及应用-MATLAB仿真》,电子工业出版社,黄小平著。%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%