uav专题

【轨迹规划论文整理(1)】UAV轨迹规划的开山之作Minimum Snap Trajectory
【轨迹规划论文整理(1)】UAV轨迹规划的开山之作Minimum Snap Trajectory Generation and Control for Quadrotors 本系列主要是对精读的一些关于无人机、无人车的轨迹搜索论文的整理,包括了论文所拓展的其他一些算法的改进思路。 这是本系列的第一篇文章,也是UAV轨迹规划的开山之作,是所有学习无人机方向的需要精读的第一篇文章,两个作者来自于宾夕

读论文 | Small object detection model for UAV aerial image based on YOLOv7
目录 1、前言 2、摘要 3、论文的方法 3.1 方法描述 3.2 方法改进 3.3 本论文的模型图 3.4 本文的数据集: 3.5 论文实验 3.6 解决的问题 3.7 论文总结 (1)文章优点 (2)方法创新点 (3)未来展望 1、前言 该论文代码未公开,大家看看方法啥的就好,里面详细的细节不用深究。没有公开代码的论文,一般是不看的。 原文:《Sma
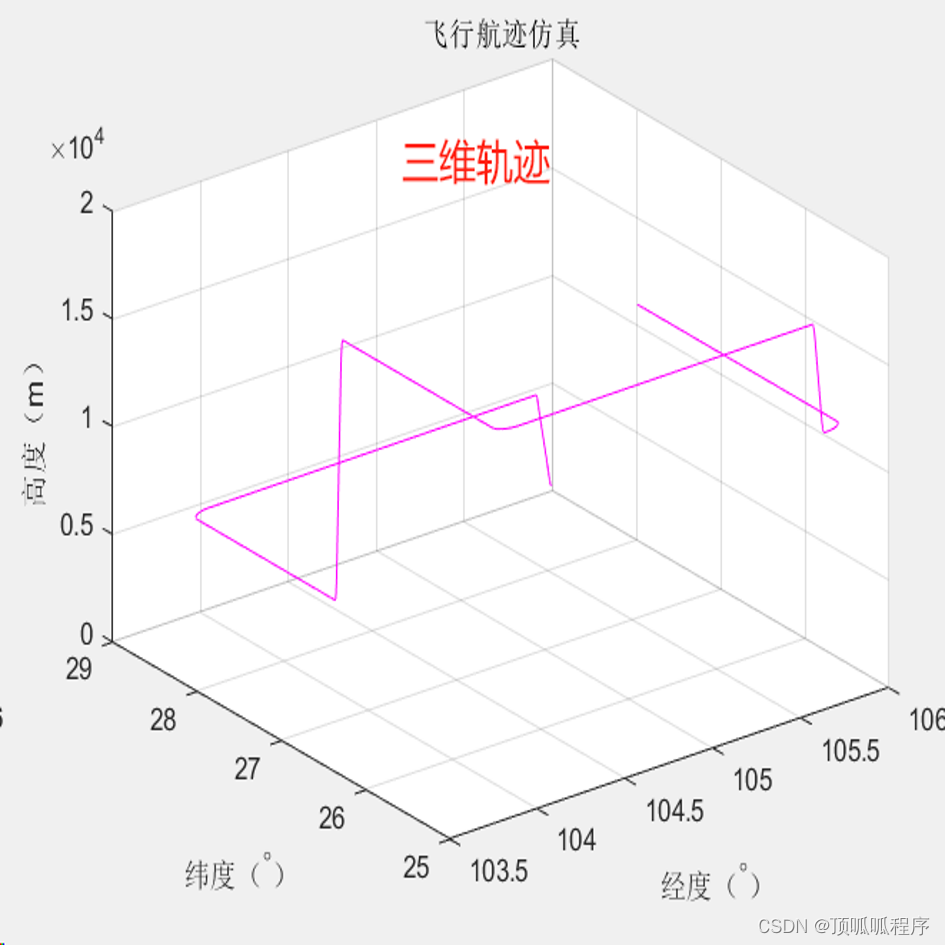
206基于matlab的无人机航迹规划(UAV track plannin)
基于matlab的无人机航迹规划(UAV track plannin)。输入输出参数包括 横滚、俯仰、航向角(单位:度);横滚速率、俯仰速率、航向角速率(单位:度/秒);飞机运动速度——X右翼、Y机头、Z天向(单位:米/秒);飞机运动加速度——X右翼、Y机头、Z天向(单位:米/秒/秒);航迹发生器初始位置经度、纬度、高度(单位:度、度、米);飞机运动速度——X东向、Y北向、Z天向(单位:米/秒);

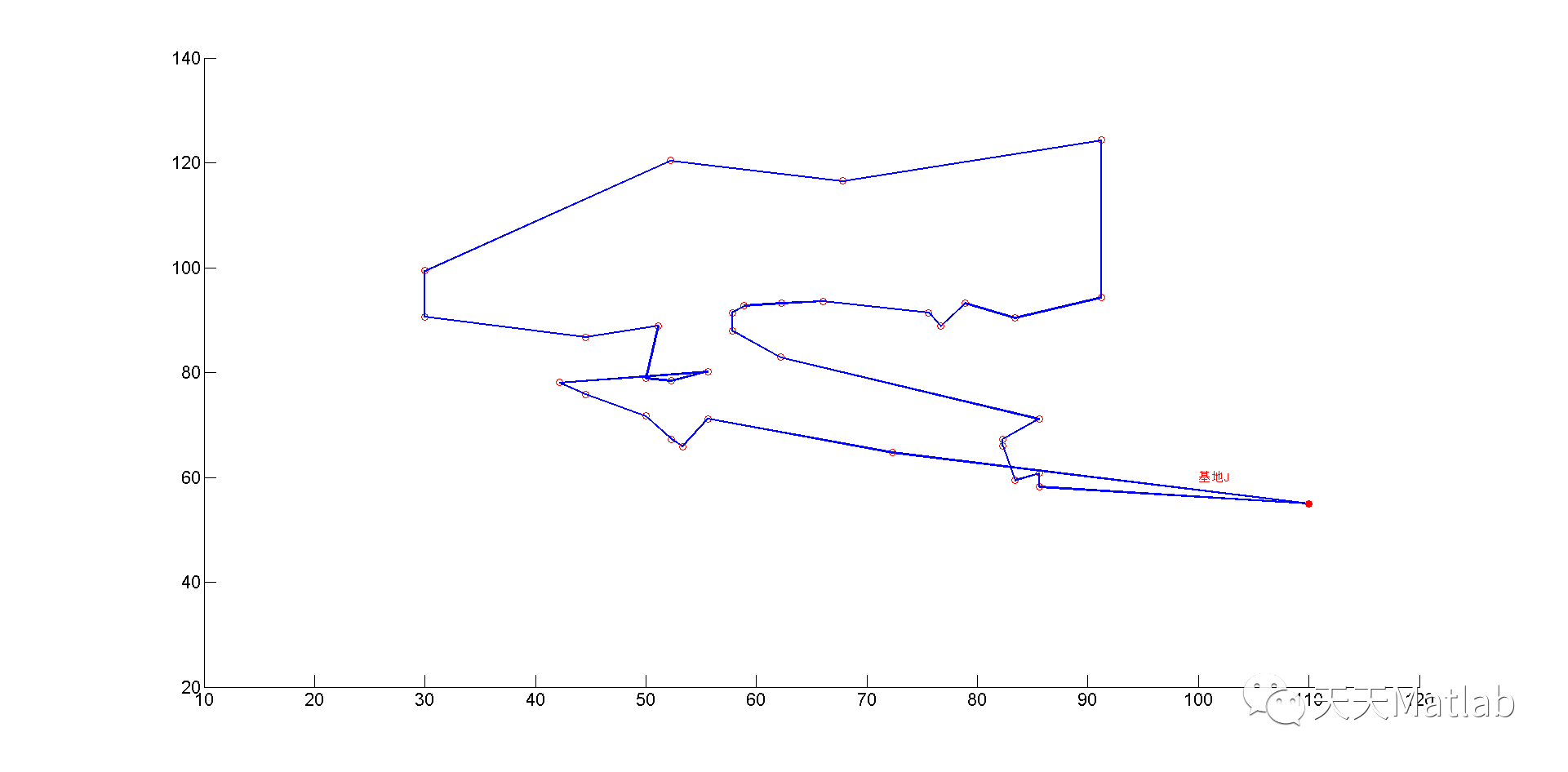
基于ACO蚁群优化的UAV最优巡检路线规划算法matlab仿真
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.本算法原理 4.1 蚂蚁移动和信息素更新 4.2 整体优化过程 5.完整程序 1.程序功能描述 基于ACO蚁群优化法的UAV最优巡检路线规划。蚁群优化算法源于对自然界蚂蚁寻找食物路径行为的模拟。在无人机巡检路线规划问题中,无人机被认为是“蚂蚁”,巡检点视为“食物源”,目标是找到一条总

ICCV 2021 | Anti-UAV 无人机跟踪竞赛启动!还有论文征稿
点击下方卡片,关注“CVer”公众号 AI/CV重磅干货,第一时间送达 ICCV 2021 Anti-UAV Workshop & Challenge征稿啦,第二届“无人机跟踪”挑战赛等你来战! 作为计算机视觉领域的三大国际顶级会议之一,CCF A类国际会议ICCV 2021(IEEE International Conference on Computer Vision)将于2021年10月1

Object Following for UAV(无人机物体跟随)
连续折腾了两个周,不断做实验,采数据,不断修改文章,终于可以告一段落了,还是靠师兄,老师的无私帮助,才能最终完成。 利用计算机图形学与PTAM算法做了无人机的标志定位与跟随,并利用卡尔曼滤波算法估算标志的移动趋势。在实验的过程中还是发现了很多问题的: (1)基于AR.Drone的PTAM 包tum_ardrone,在飞机起飞或者移动较快的时候,定位很容易产生偏差,大约在20cm左右,但基本趋势

【图像拼接】论文精读:Superpixel-Based Seamless Image Stitching for UAV Images
第一次来请先看这篇文章:【图像拼接(Image Stitching)】关于【图像拼接论文精读】专栏的相关说明,包含专栏使用说明、创新思路分享等(不定期更新) 图像拼接系列相关论文精读 Seam Carving for Content-Aware Image ResizingAs-Rigid-As-Possible Shape ManipulationAdaptive As-Natural-As
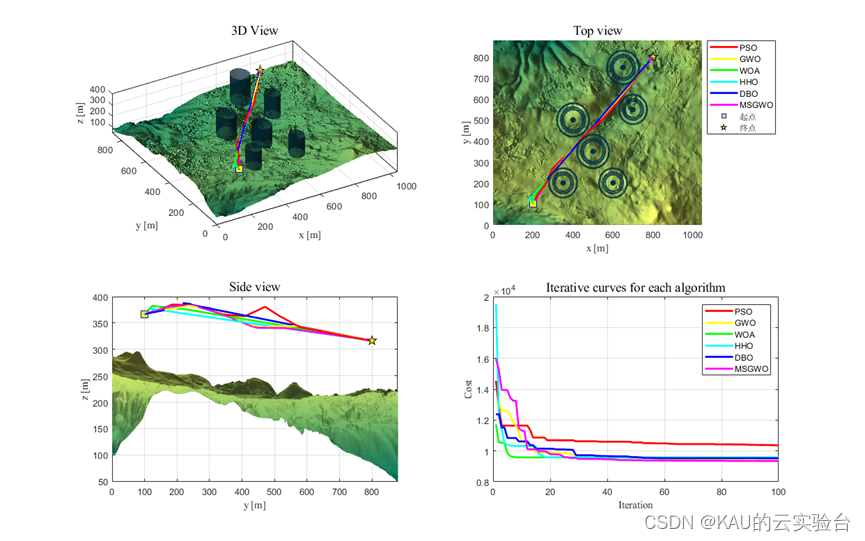
UAV | 多算法在多场景下的无人机路径规划(Matlab)
近年来,无人机(unmanned aerial vehicle,UAV)由于其灵活度高、机动性强、安全风险系数小、成本低等特点,被广泛应用于搜索巡逻、侦察监视、抢险救灾、物流配送、电力巡检、农业灌溉等军用或民用任务。路径规划是无人机执行任务的关键,也是自主无人机在工程应用上的主要挑战。 现有的无人机路径规划算法主要分为经典算法和元启发式算法,经典算法包括:A*算法、快速搜索随机数RRT等,但

Siamese Transformer Pyramid Networks for Real-Time UAV Tracking(论文翻译)
论文地址:https://arxiv.org/pdf/2110.08822.pdf Code:https://github.com/RISC-NYUAD/SiamTPNTracker 目录 摘要 1.引言 2.相关工作 2.1 轻量级网络 2.2 目标跟踪 3.提出的方法 3.1 特征提取网络 3.2 特征融合网络 3.3 Transformer金字塔网络 3.4 预

我在github上搜PX4 T265还真搜到了东西,Auterion 比上次搜说明UAV SLAM要好些
我在github上搜PX4 T265还真搜到了东西,比上次搜说明UAV SLAM要好些,直接搜具体的 我是最开始看到PX4出的那个PX4 vision drone 阿木的介绍说是一个开源视觉无人机,我想开源莫非github上有源码?于是我萌发来github上搜一搜。这次搜我可以直接搜PX4了,因为经过前面这么多了解已经认识到很多人就是用pixhawk PX4来弄无人机SLAM的,而且
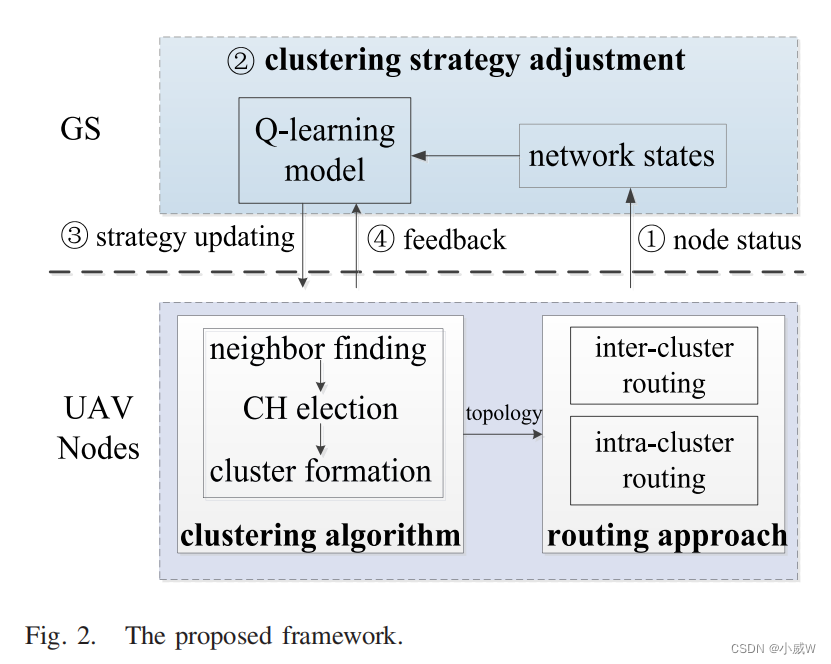
【论文阅读】ICRA: An Intelligent Clustering Routing Approach for UAV Ad Hoc Networks
文章目录 论文基本信息摘要1.引言2.相关工作3.PROPOSED SCHEME4.实验和讨论5.总结补充 论文基本信息 《ICRA: An Intelligent Clustering Routing Approach for UAV Ad Hoc Networks》 《ICRA:无人机自组织网络的智能聚类路由方法》 Published in: IEEE Transactio

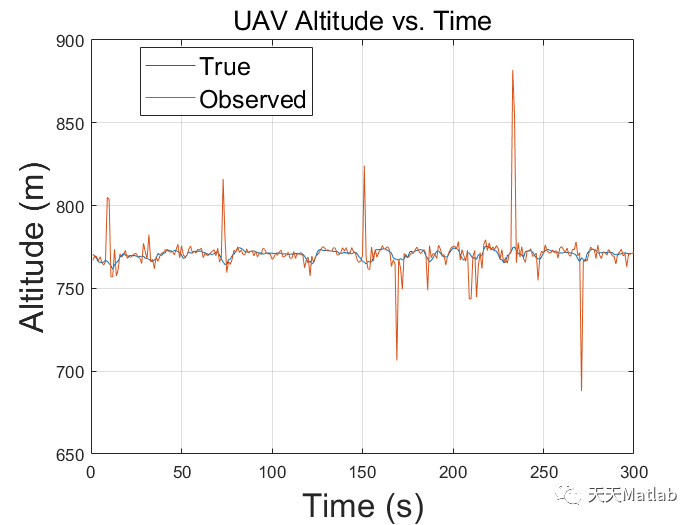
【转】无人机故障数据集ALFA: A Dataset for UAV Fault and Anomaly Detection
这里写自定义目录标题 无人机故障数据集资源地址:https://kilthub.cmu.edu/articles/dataset/ALFA_A_Dataset_for_UAV_Fault_and_Anomaly_Detection/12707963 参考文献: [1]: Keipour A, Mousaei M, Scherer S. ALFA: A dataset for
基于非线性最小二乘法 (NLLS) 实现伪距数据的 UAV 轨迹跟踪附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 🍎个人主页:Matlab科研工作室 🍊个人信条:格物致知。 更多Matlab仿真内容点击👇 智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统 信号处理 图像处理 路径规划
【路径规划】基于蚁群算法实现无人机uav巡检附matlab代码
1 内容介绍 现代社会的无人机成本造价低、不易损耗、轻巧灵便、易躲藏、能精确打击 目标这些特点,使其在一些高危任务中发挥了不可替代的作用[5]。无人机的用处主要有两种:民用和军事。在民用方面,我们可以运用无人机对一些可能出现隐患的事物进行监控,比如对震后灾区的地面勘探、森林火灾的检测、风暴中心的气象数据等。在 2014 索契奥运会上,无人机携带的摄像拍摄的画面更贴近运动员,画质更为清晰,201

Deep Q-Learning-Based Node Positioning for Throughput-Optimal Communications in Dynamic UAV 论文笔记
Deep Q-Learning-Based Node Positioning for Throughput-Optimal Communications in Dynamic UAV Swarm Network 1、创新点 1)使用多层协议参数来识别无人机群状态 物理层 → \rightarrow →SINR数据链路层 → \rightarrow → BER网络层 → \rightar
配置GlobalTrack到Anti-UAV(四)
1、在tools/train_uavtir.py中设置work_dir,训练得到的模型将保存在这里 2、在tools下新建test_Antiuav410.py 与test_global_track.py相比,加入sys、GPUs设定、ckp_file变更、name_suffix变更、evaluators变更 这里注意file的路径,此时控制台应在GlobalTrack-master下,因此加

配置GlobalTrack到Anti-UAV(三)
1、数据集接口增加 打开datasets/wrappers.py,在def _dataset中增加新的数据集项,例如: 打开_submodules/neuron/data/datasets/_init_.py,添加from .uavtir import * 在_submodules/neuron/data/datasets路径下新建文件uavtir.py,该文件根据其它数据集文件进行

一群飞行机器人探索未知环境的最小导航方案(UAV-2019)
摘要 成群的微型飞行机器人具有探索未知室内环境的巨大潜力。它们的小尺寸允许它们在狭窄的空间内移动,它们的轻重量使它们可以安全地在人类周围操作。到目前为止,由于缺乏足够的导航策略,这项任务已经遥不可及。缺乏外部基础设施意味着任何定位尝试都必须由机器人自己完成。最先进的解决方案,如同步本地化和映射,仍然对资源要求过高。本文介绍了群体梯度bug算法(SGBA),这是一种最小导航解决方案,允许一群微型飞
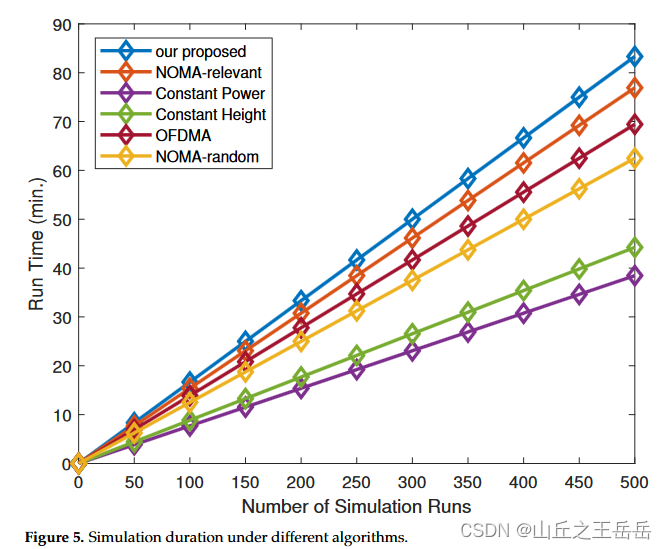
16 用于NOMA IoT网络上行链路安全速率最大化的HAP和UAV协作框架
文章目录 摘要相关模型仿真实验仿真结果 摘要 优化无人机到HAP的信道分配、用户功率和无人机三维位置来研究上行安全传输解决非凸问题,采用K-means聚类算法,将成对的用户划分成不同的组,每个簇可以有相应的无人机服务,然后将构造的优化问题化解成三个子问题,并基于块坐标下降算法进行迭代求解,最后进行仿真。 相关模型 城市宏蜂窝(UMa)模型表示用户-无人机链路中的路径损耗PL
无人机UAV目标检测与跟踪(代码+数据)
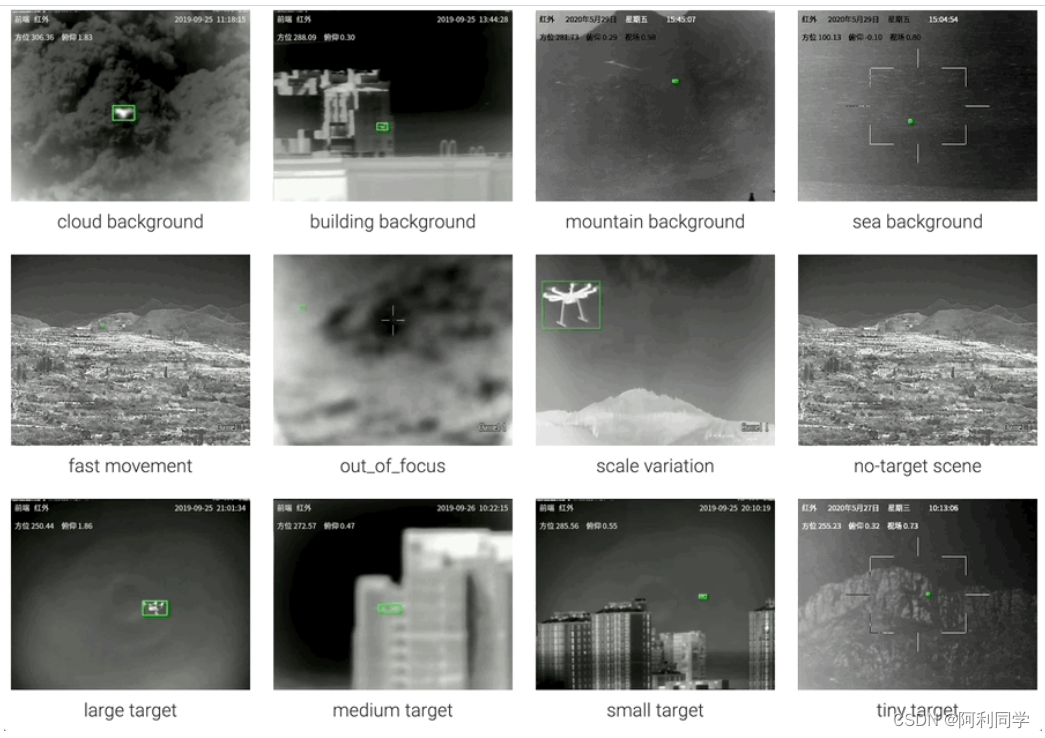
前言 近年来,随着无人机的自主性、灵活性和广泛的应用领域,它们在广泛的消费通讯和网络领域迅速发展。无人机应用提供了可能的民用和公共领域应用,其中可以使用单个或多个无人机。与此同时,我们也需要意识到无人机侵入对空域安全造成的潜在威胁。今年早些时候,多次无人机目击事件导致机场停飞,给航空公司带来了巨大的经济损失。 目前,在计算机视觉社区中,没有一个高质量的反无人机数据集被用于真实动态场景的捕捉
无人机UAV目标检测与跟踪(代码+数据)
前言 近年来,随着无人机的自主性、灵活性和广泛的应用领域,它们在广泛的消费通讯和网络领域迅速发展。无人机应用提供了可能的民用和公共领域应用,其中可以使用单个或多个无人机。与此同时,我们也需要意识到无人机侵入对空域安全造成的潜在威胁。今年早些时候,多次无人机目击事件导致机场停飞,给航空公司带来了巨大的经济损失。 目前,在计算机视觉社区中,没有一个高质量的反无人机数据集被用于真实动态场景的捕捉

论文阅读——IEEE--古镇村落的历史建筑群的三维UAV建模采样
论文阅读——IEEE——Unmanned Aerial Vehicle and Ground Remote Sensing Applied in 3D Reconstruction of HistoricalBuilding Groups in Ancient Villages 2018 Fifth International Workshop on Earth Observation and