soem专题

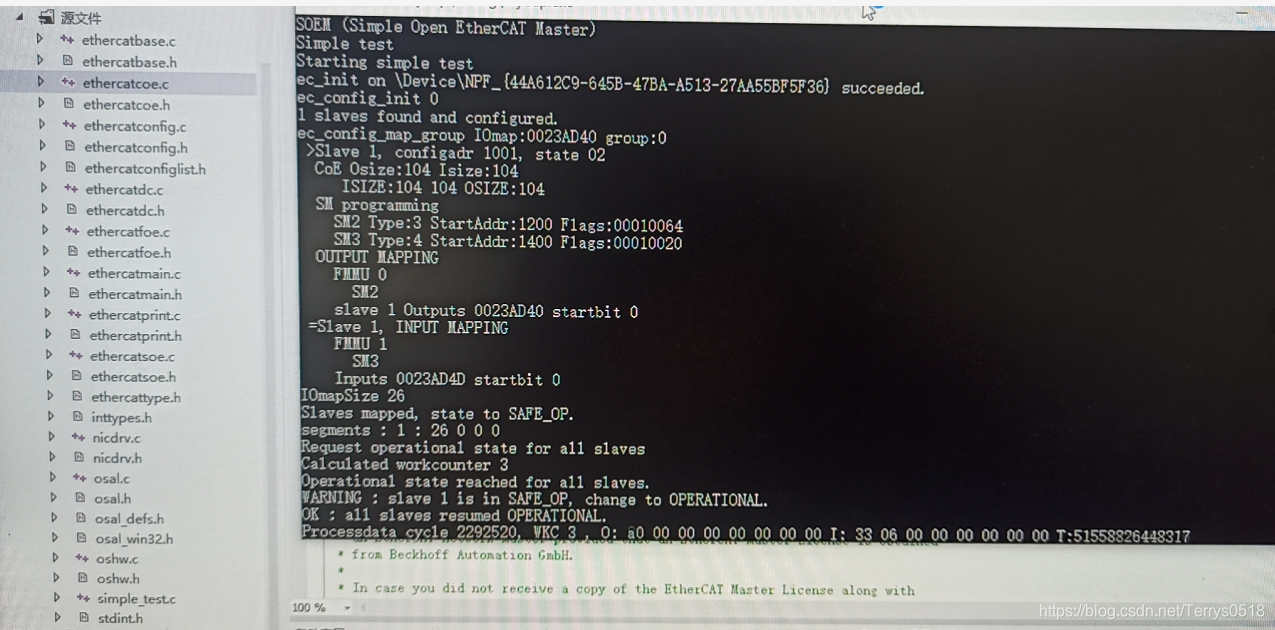
EtherCAT主站SOEM -- 31 -- STM32F767-SOEM从站IO模块采集DI及输出DO
EtherCAT主站SOEM -- 31 -- STM32F767-SOEM从站IO模块采集DI及输出DO 0 QT-SOEM及STM32F767-SOEM视频欣赏及源代码链接:0.1 QT-SOEM博客、视频欣赏及源代码链接0.2 STM32F767-SOEM 博客、视频欣赏及源代码链接 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcon

EtherCAT主站SOEM -- 29 -- STM32F767-SOEM通过 CSP模式(周期同步位置模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 29 -- STM32F767-SOEM通过 CSP模式(周期同步位置模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcontrol.h1.4 motrorcontrol.cpp1

EtherCAT主站SOEM -- 28 -- STM32F767-SOEM通过 CSV模式(周期同步速度模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 28 -- STM32F767-SOEM通过 CSV模式(周期同步速度模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcontrol.h1.4 motrorcontrol.cpp1
EtherCAT主站SOEM -- 27 -- STM32F767-SOEM通过 PT模式(力矩模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 27 -- STM32F767-SOEM通过 PT模式(力矩模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcontrol.h1.4 motrorcontrol.cpp1.5 ma
EtherCAT主站SOEM -- 25 -- STM32F767-SOEM通过 PV模式(速度模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 25 -- STM32F767-SOEM通过 PV模式(速度模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载0.3 STM32F7-SOEM视频预览0.4 STM32F7-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 m
VS2012下配置WinPcap环境,运行SOEM
1. 下载并安装WinPcap运行库 http://www.winpcap.org/install/default.htm 2. 下载WinPcap开发包 3 新建Visual C++的Win32控制台应用程序,设置为空项目 4 打开项目属性,C/C++ --> Preprocessor --> Preprocessor Definitions 添加WPCAP和HAVE_REMOTE
EtherCAT主站SOEM -- 20 --Qt-Soem通过 PT模式(力矩模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 20 --Qt-Soem通过 PT模式(力矩模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 PS 特别注意1 程序文件修改替换1.1 allvalue.h1.2 motrorcontrol.h1.3 mainwindow.cpp1.4 motrorcontrol.cpp 2
EtherCAT主站SOEM -- 19 --Qt-Soem通过CSP模式(周期同步位置模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 19 --Qt-Soem通过CSP模式(周期同步位置模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 motrorcontrol.h1.3 mainwindow.cpp1.4 motrorcontrol.cpp 2 ui界
EtherCAT主站SOEM -- 13 --Qt-Soem通过界面按键控制 EtherCAT IO模块的io输出
EtherCAT主站SOEM -- 13 --Qt-Soem通过界面按键控制 EtherCAT IO模块的io输出 一 mainwindow.c 文件函数:1.1 自定义PDO配置2.2 主站初始化2.3 去motrorcontrol界面 二 motrorcontrol.c 文件三 allvalue.h 文件该文档修改记录:总结 一 mainwindow.c 文件函数: main
EtherCAT主站SOEM -- 12 -- EtherCAT从站的实际XML文件分析
EtherCAT主站SOEM -- 12 -- EtherCAT从站的实际XML文件分析 1 XML 文件及示例1.1 EtherCATInfo 示例1.2 Vendor 示例1.3 Descriptions 示例1.3.1 Groups1.3.2 Devices1.3.2.1 Physics1.3.2.2 Type1.3.2.3 Name1.3.2.4 Info1.3.2.5 GroupT
EtherCAT主站SOEM -- 11 -- EtherCAT从站 XML 文件解析
EtherCAT主站SOEM -- 11 -- EtherCAT从站 XML 文件解析 1 EtherCAT 从站信息规范1.1 XML 文件说明1.1.1 XML 数据类型1.1.2 EtherCATInfo1.1.3 Groups1.1.4 Devices1.1.5 Modules1.1.6 Types1.1.6.1 AccessType 的组成1.1.6.2 ArraylnfoType
EtherCAT主站SOEM -- 11 -- EtherCAT从站 XML 文件解析
EtherCAT主站SOEM -- 11 -- EtherCAT从站 XML 文件解析 1 EtherCAT 从站信息规范1.1 XML 文件说明1.1.1 XML 数据类型1.1.2 EtherCATInfo1.1.3 Groups1.1.4 Devices1.1.5 Modules1.1.6 Types1.1.6.1 AccessType 的组成1.1.6.2 ArraylnfoType
EtherCAT主站SOEM -- 7 -- SOEM之ethercatmain.h/c文件解析
EtherCAT主站SOEM -- 7 -- SOEM之ethercatmain.h/c文件解析 一 ethercatmain.h/c文件功能预览:1.1 ethercatmain里面的结构体1.2 ethercatmain里面的函数 二 ethercatmain.h/c 文件的主要函数的作用:2.1 结构体介绍2.1.1 `ec_adaptert` 结构体:2.1.2 `ec_fmmut`
EtherCAT主站SOEM -- 8 -- SOEM之 ec_slave 结构体详细分析
EtherCAT主站SOEM -- 8 -- SOEM之 ec_slave 结构体详细分析 一 ec_slave 结构体功能预览:二 ec_slave结构体成员变量翻译三 ec_slave里成员变量的使用该文档修改记录:总结 ec_slavet 结构体是用于描述EtherCAT网络上从站的详细信息的数据结构。非常重要也是最经常使用的一个结构体,所有才单独拿一篇博客来详细介绍。
SOEM主站开发篇(3):为APP程序添加命令
0 工具准备 1.SOEM-1.4.0源码(官网:http://openethercatsociety.github.io/)2.Linux开发板(本文为正点原子I.MX6U ALPHA开发板)3.交叉编译工具(arm-linux-gnueabihf-gcc)4.cmake(版本不得低于3.9,本文为3.9.2)5.Ubuntu 16.04(用于编译生成Linux开发板的可执行文件)
SOEM主站开发篇(2):添加SOEM主站APP程序
0 工具准备 1.SOEM-1.4.0源码(官网:http://openethercatsociety.github.io/)2.Linux开发板(本文为正点原子I.MX6U ALPHA开发板)3.交叉编译工具(arm-linux-gnueabihf-gcc)4.cmake(版本不得低于3.9,本文为3.9.2)5.Ubuntu 16.04(用于编译生成Linux开发板的可执行文件)
SOEM源码解析——ecx_detect_slaves(初始化从站、检测从站数量)
0 工具准备 1.SOEM-master-1.4.0源码 1 ecx_detect_slaves函数总览 /*** @brief 检测从站数量* * @param context 句柄* @return int 从站数量*/int ecx_detect_slaves(ecx_contextt *context){uint8 b;uint16 w;int wkc;/* make
EtherCAT主站SOEM -- 4 -- SOEM之ethercatprint.h/c文件解析
EtherCAT主站SOEM -- 4 -- SOEM之ethercatprint.h/c文件解析 一 ethercatprint.h/c文件功能预览:二 ethercatprint.h/c 文件的主要函数的作用:2.1.1 `char* ec_sdoerror2string(uint32 sdoerrorcode)`2.1.2 `char* ec_ALstatuscode2string(u

SOEM源码解析——ecx_init_context(初始化句柄)
0 工具准备 1.SOEM-master-1.4.0源码 1 ecx_init_context函数总览 /*** @brief 初始化句柄* @param context 句柄*/void ecx_init_context(ecx_contextt *context){int lp;*(context->slavecount) = 0;/* clean ec_slave array *

SOEM源码解析——eeprom_read(读EEPROM)
0 工具准备 1.SOEM-master-1.4.0源码 1 eeprom_read函数总览 eeprom_read函数在SOEM源码的路径如下:test->linux->eepromtool->eepromtool.c,功能是读取指定字地址和长度的EEPROM数据: /*** @brief 读取EEPROM数据* * @param slave 从站序号* @param start 起始