sobel专题

sobel_dir 方向图和sobel的一些想法
怎么使用呢! 1,通过方向图可以提取 直线 或水平线region区域,提出来的dirregion区域 2,通过sobel的幅度度,分割出变化剧烈的区域 fuduregion 3,两个region相交,可以准确定位幅度范围内+方向的边界 4,sobel算子是可以只做x,y方向的单项幅度图的,sobel_amp在一定场合有特别的用处,值得关注 5,关于大掩码超过3的size,要注意的

图像边缘检测技术详解:利用OpenCV实现Sobel算子
图像边缘检测技术详解:利用OpenCV实现Sobel算子 前言Sobel算子的原理代码演示结果展示结语 前言 在数字图像处理的广阔领域中,边缘检测技术扮演着至关重要的角色。无论是在科学研究、工业自动化,还是在日常生活中的智能设备中,我们都需要从图像中提取有用的信息。边缘,作为图像中亮度变化最显著的地方,为我们提供了识别和理解图像内容的关键线索。因此,边缘检测算法成为了计算机视

Sobel算子,Scharr算子和Laplacian算子
图像边缘检测大幅度地减少了数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性。有许多方法用于边缘检测, 绝大部分可以划分为两类:基于搜索和基于零穿越。 基于搜索:通过寻找图像一阶导数中的最大值来检测边界,然后利用计算结果估计边缘的局部方向,通常采用梯度的方向,并利用此方向找到局部梯度模的最大值,代表算法是Sobel算子和Scharr算子 基于零穿越:通过寻找图像二阶导数零穿越来寻找边
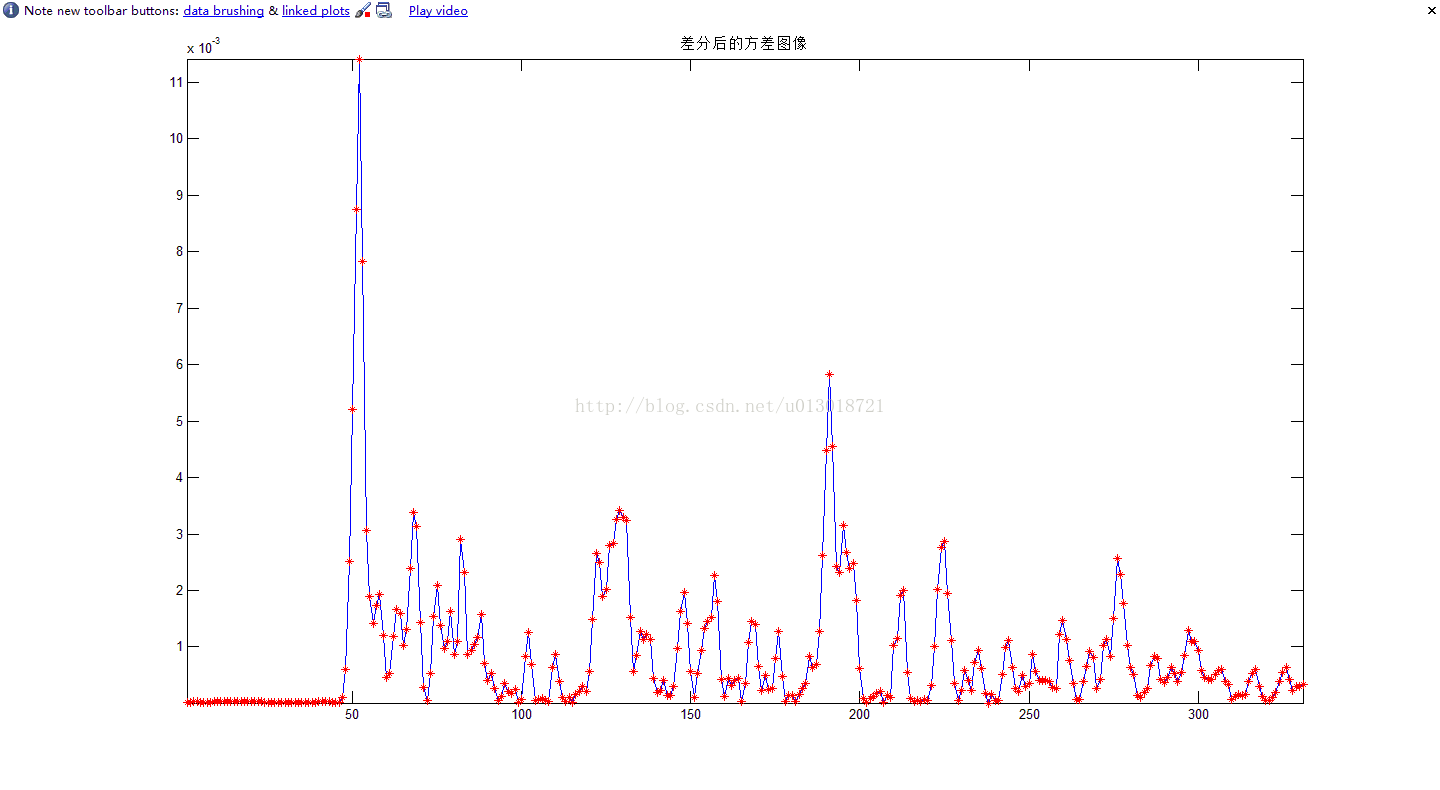
matlab---边缘之sobel简单实例
最近在项目中需要做一些图像边缘检测的工作,但是由于之前没接触过图像处理的相关知识,所以只得在matlab里面对 一些图像处理函数挨个挨个的试着用。在用的过程中在慢慢的明白了一些简单的图像处理方法。 matlab代码如下: load POTDR_室外实验_20140120_160549TwoPoint2.mat %加载数据,测试数据 Data=data(1:size(data

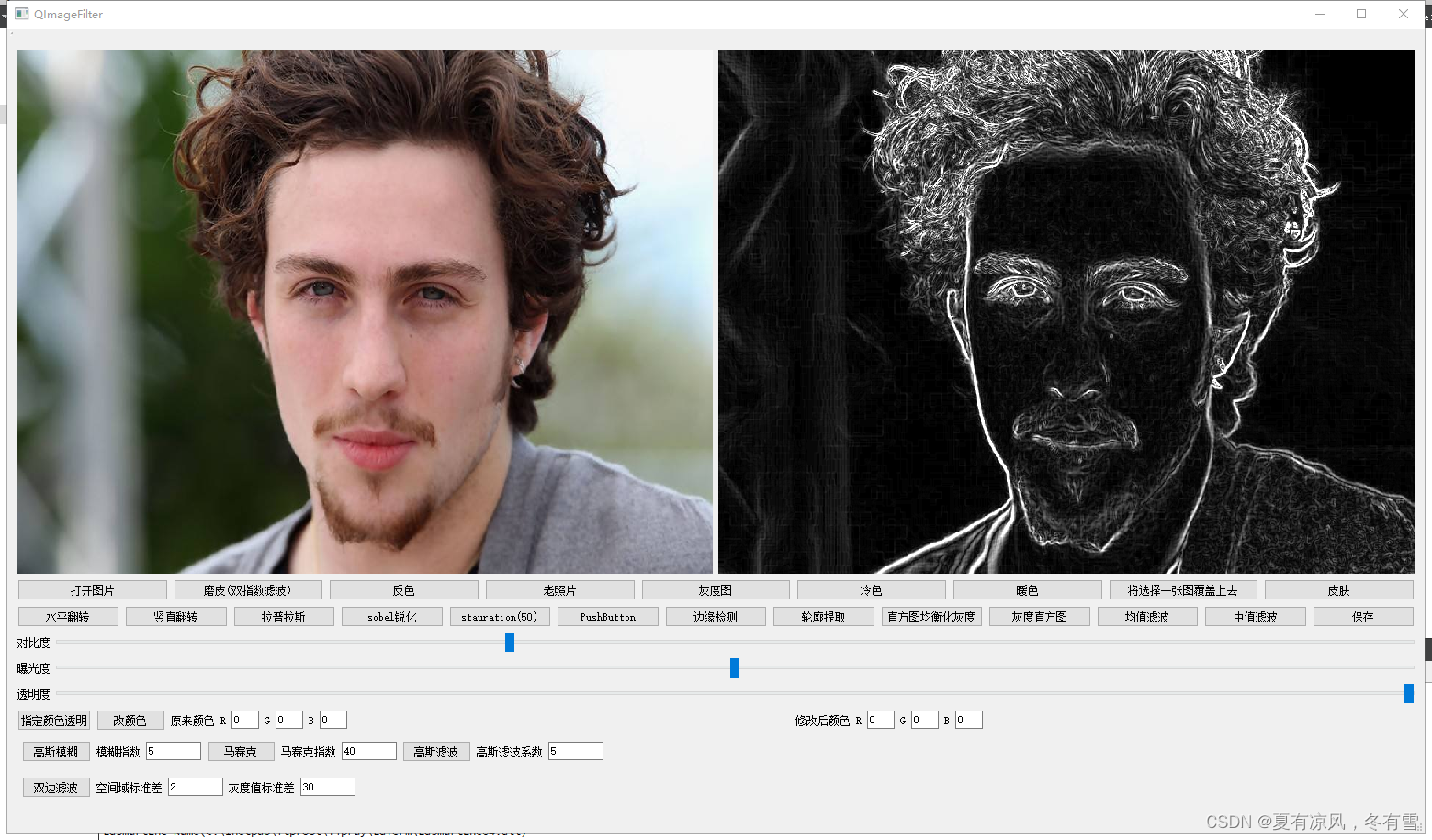
Qt图像处理技术十二:QImage实现边缘检测(sobel算法)
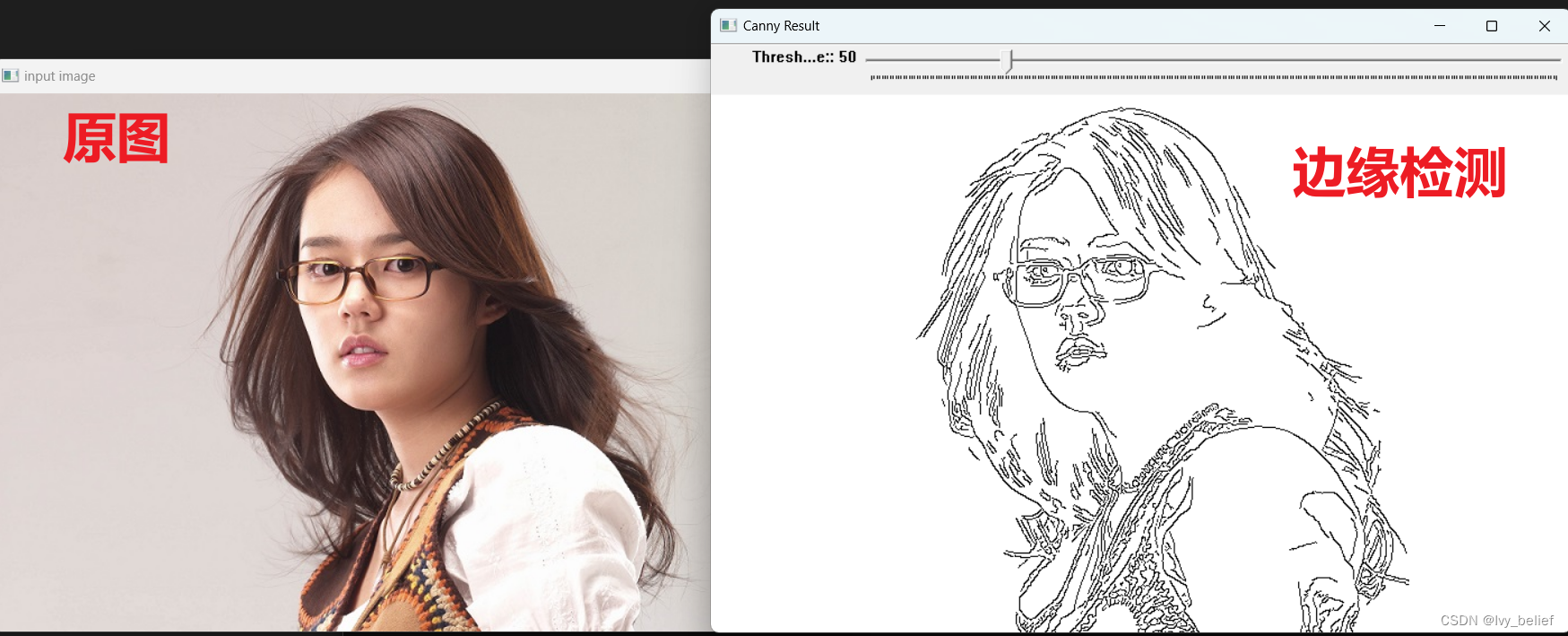
效果图 原理 Sobel算法是一种常用的边缘检测算法,它利用图像的灰度变化来检测图像中物体的边缘。Sobel算法主要包括以下几个步骤: 灰度化: 首先将彩色图像转换为灰度图像,因为灰度图像只包含单通道的灰度信息,有利于边缘检测处理。 计算水平和垂直方向的梯度: 对灰度图像进行水平和垂直方向的滤波操作。分别使用Sobel算子对图像进行卷积操作,Sobel算子是一个3x3的矩阵,用于对图像的每

在DM6467上使用C6Accel进行Sobel处理
1 C6Accel简介 C6Accel是一个包括许多信号处理和数学计算的算法包,它提供了一系列API,可以供ARM端程序调用。C6Accel符合TI的xDAIS算法标准,可以很容易地通过Codec Engine来调用并快速执行。用户可以使用C6Accel来加速其应用程序,也可以添加自定义的DSP算法以扩展C6Accel。 C6Accel包括浮点运算、定点运算、数学运算,其D

数学之路-python计算实战(22)-机器视觉-sobel非线性滤波
sobel非线性滤波,采用梯度模的近似方式 Sobel Calculates the first, second, third, or mixed image derivatives using an extended Sobel operator. C++: void Sobel (InputArray src, OutputArray dst, int ddep
求Sobel的一点注意
在使用sobel算子时,这个细节经常不容易注意到而引起麻烦。求值时,会出现负值,这样定义目标图像位深度时就要用16位有符号的了,即 IplImage *sobel;sobel=cvCreateImage(cvGetSize(img),IPL_DEPTH_16S,1); 之后 cvSobel(gray,sobel,1,0,3); 如果想将sobel显示出来,还需要进行转换到
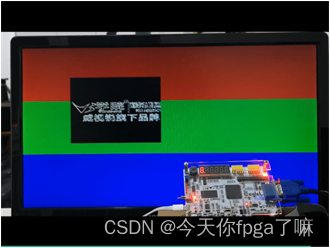
VGA项目:联合精简帧+双fifo+sobel算法 实现VGA显示(未完)
前言:该项目实际上是在很多基础的小练习上合成起来的,例如涉及到uart(rs232)的数据传输、双fifo流水线操作、VGA图像显示,本次内容在此基础上又增添了sobel算法,能实现图像的边沿监测并VGA显示。 文章目录 1.项目描述2.sobel算法解析:3.模块结构示意图:4.sobel_ctrl模块设计4.1波形设计4.2代码 5.VGA_shift模块设计5.1 显示效果示意图:5.

使用sobel算子提取图片轮廓
代码: import matplotlib.pyplot as plt # plt 用于显示图片import matplotlib.image as mpimg # mpimg 用于读取图片import numpy as npimport tensorflow as tf myimg = mpimg.imread('img.jpg') # 读取和代码处于同一目录下的图片plt.imsh

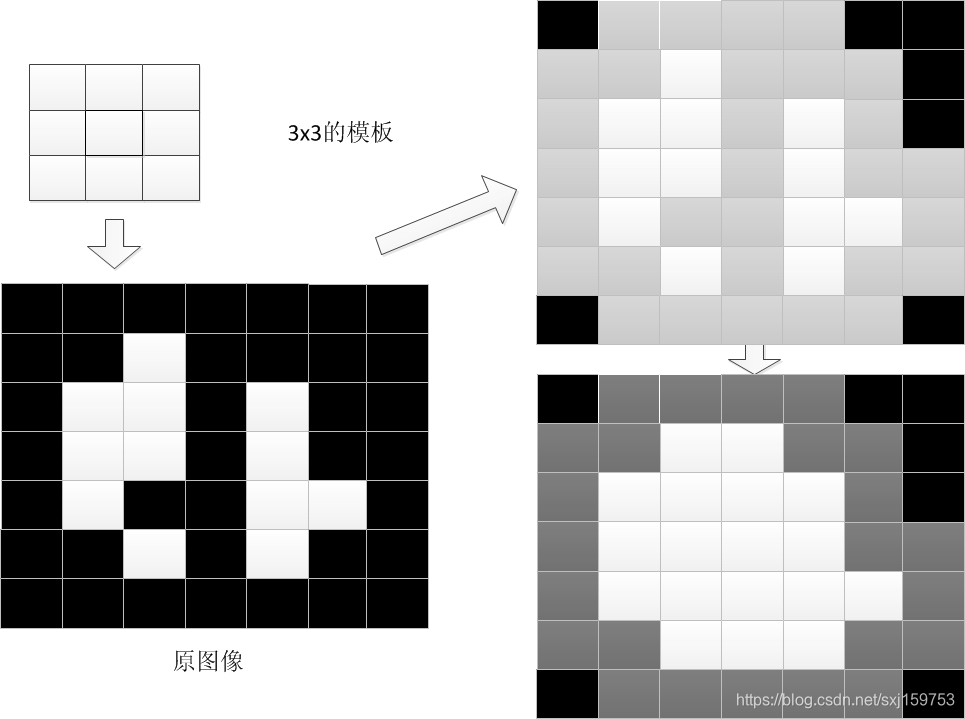
(十二)图像的Sobel梯度锐化
环境:Windows10专业版 + IDEA2021.2.3 + jdk11.0.1 + OpenCV-460.jar 系列文章: (一)Python+GDAL实现BSQ,BIP,BIL格式的相互转换 (二)BSQ,BIL,BIP存储格式的相互转换算法 (三)单波段图像的伪彩色合成:密度分割(含介绍OpenCV中的Mat类) (四)图像的%2线性拉伸 (五)图像的标准假彩色合成 (六)图
FPGA 图像边缘检测Verilog代码(Sobel算子)
1 顶层代码 `timescale 1ns / 1ps// 边缘检测一阶微分算子:Sobel算子module image_sobel_edge_detect (input clk, // 时钟信号input reset, // 复位信号input vsync_i, // 输入场同步信号input valid

OpenCV学习笔记(十一)——利用Sobel算子计算梯度
Sobel算子是基于一阶导数的离散差分算子,其中Sobel对于像素值的变化是十分敏感的,在进行边缘检测的时候,Sobel算子常用于对周围像素的重要性进行检测。 Sobel算子包括检验水平方向的算子和检测竖直方向的算子 计算机梯度值的操作如下: 用算子在图像上进行卷积操作检测水平边缘。公式为:用算子在图像上进行卷积操作检测垂直边缘。 公式为:结合水平方向和垂直方向计算每一个梯度点的

python使用canny和sobel算子联合检测自定义源码解决批量处理瓶盖图片霍夫变换源码实战
python使用canny和sobel算子联合检测自定义源码解决批量处理瓶盖图片霍夫变换源码实战 源码解说很清楚的哦。 函数1:jiance.py #!/usr/bin/env python # -*- coding:utf-8 -*-# Author's_name_is_NIKOLA_SSimport cv2import numpy as npfrom canny import
02.OpenCV 车牌识别 sobel定位
opencv模块介绍 简介 OpenCV是一个基于BSD许可开源发行的跨平台计算机视觉库。拥有C++,Python和Java接口,并且支持Windows, Linux, Mac OS, iOS 和 Android系统。实现了图像处理和计算机视觉方面的很多通用算法。 模块功能Core核心基础模块,定义了被所有其他模块和基本数据结构(包括重要的多维数组Mat)使用的基本函数、底层数据结构和算

6.边缘检测:梯度——索贝尔算子(Sobel)、Matlab梯度(Sobel)实战_4
目录 索贝尔算子(Sobel) Matlab梯度(Sobel)实战 索贝尔算子(Sobel) 人们其实做导数和边的时间已经很长了。最经典的是Sobel运算,它是以一个叫索贝尔的人的名字命名的。 Sobel运算就像我给你们看的上面的图片一样。但不是 和 ,它很奇怪的是它在乘以。 可以看到,它不仅是-2 +2 ,然后除以4得到相同的值。如图: 但它在我上面的行上也有-1

OpenCV学习笔记-Sobel算子
该函数如下: Sobel 使用扩展 Sobel 算子计算一阶、二阶、三阶或混合图像差分 void cvSobel( const CvArr* src, CvArr* dst, int xorder, int yorder, int aperture_size=3 ); src 输入图像. dst 输出图像. xorder x 方向上的差分阶数 yorder y 方向上的差

Sobel算子边缘检测(vc实现)
void CISLSView::OnSobel(){//程序编制:李立宗 lilizong@gmail.com//2012-8-12if(myImage1.IsNull())OnOpenResourceFile();if(!myImage2.IsNull())myImage2.Destroy();if(myImage2.IsNull()){myImage2.Create(myImage1
OPENCV中的Sobel函数
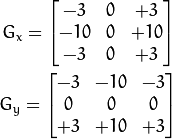
sobel算子是一种常用的边缘检测算子,是一阶的梯度算法。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。它进行处理的模板如下: 其中,Gx是横向的算子,Gy是纵向的算子。 原图像记为f,则 GX = Gx*f GY = Gy*f Gx =-1*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+

opencv0014 索贝尔(sobel)算子
前面学习的滤波器主要是用来模糊图像,今天一起来了解关于边缘识别的滤波吧!嘿嘿 边缘 边缘是像素值发生跃迁的位置,是图像的显著特征之一,在图像特征提取,对象检测,模式识别等方面都有重要的作用。 人眼如何识别图像边缘? 比如有一幅图,图里面有一条线,左很亮,右边很暗,那人眼就很容易识别这条线作为边缘也就是图像的灰度值快速变化的地方. soble算子 sobel算子对图像求一阶导数。一阶
使用Sobel算子把视频转换为只剩边缘部分
效果展示 原始视频 修改后的视频 整体代码 import cv2vc = cv2.VideoCapture('test.mp4')if vc.isOpened():open, frame = vc.read()else:open = Falsei = 0while open:ret, frame = vc.read()if frame is None:breakif ret =
12- OpenCV:算子(Sobel和Laplance) 和Canny边缘检测 详解
目录 一、Sobel算子 1、卷积应用-图像边缘提取 2、Sobel算子(索贝尔算子) 3、相关的API(代码例子) 二、Laplance算子 1、理论 2、API使用(代码例子) 三、Canny边缘检测 1、Canny算法介绍 2、API使用(代码例子) 一、Sobel算子 1、卷积应用-图像边缘提取 在这个红点变化最大,变化率很高的,梯度也是

基于FPGA的Sobel算法实现
1、图像的简单预处理对于FPGA来说是十分简单的,本篇博客是以源码的形式实现了一个行列分别均为128个长度图片做边缘检测,未对边界做进一步处理,给需要的人一些修改空间。 2、程序中都是源码,未采用任何IP核。 vivado:201901 matlab:2019a 3、模块图像输入输出均采用axis接口,其中tuser信号在输入和输出的第一个像素时被拉高,指示一帧的开始,last在输入和输出最后一个

基于FPGA的sobel边缘检测
这个真是让我头疼的问题 虽然这个问题很经典 但是我就是不会啊 以上实现由两个大神的code可以参考,一个是无双(http://www.cnblogs.com/oomusou/archive/2008/08/25/verilog_sobel_edge_detector.html)的,一个是crazybingo的(http://group.chinaaet.com/116/79095) 还有一
使用opencv的Sobel算子实现图像边缘检测
1 边缘检测介绍 图像边缘检测技术是图像处理和计算机视觉等领域最基本的问题,也是经典的技术难题之一。如何快速、精确地提取图像边缘信息,一直是国内外的研究热点,同时边缘的检测也是图像处理中的一个难题。早期的经典算法包括边缘算子方法、曲面拟合的方法、模板匹配方法、阈值法等。 近年来,随着数学理论与人工智能技术的发展,出现了许多新的边缘检测方法,如Roberts、Laplacan、Canny等图像的