simscape专题

【添加核心机械臂动力学】Model and Control a Manipulator Arm with Robotics and Simscape
机械臂动力学 为了设计控制器,机械臂动力学必须表示给定力矩输入的关节位置。这在机械臂动力学子系统中通过一个前向动力学块实现,该块将关节力矩转换为给定当前状态的关节加速度,然后通过两次积分得到完整的关节配置。积分器初始化为q0和dq0,即初始关节位置和速度。 此外,夹爪控制子系统将关节控制力矩覆盖到夹爪执行器上,应用10牛顿的力来打开或关闭夹爪。 需要注意的是,第二个积分器是饱和的。 虽然设计
MathWorks的介绍,以及Simscape 的主要特点
MathWorks 是一家美国的软件公司,以其科学计算软件为广泛知名,特别是 MATLAB 和 Simulink。这两款产品广泛用于工程、科学研究、学术界和工业应用中,帮助用户进行数学计算、算法开发、数据可视化、数据分析,以及仿真和模型构建。 MathWorks 的主要产品: MATLAB: 是一种高级技术计算语言和交互式环境,用于算法开发、数据可视化、数据分析和数值计算。MATL
Simscape Multibody与RigidBodyTree:机器人建模
RigidBodyTree:主要用于表示机器人刚体结构的动力学模型,重点关注机器人的几何结构、质量和力矩,以及它们如何随时间变化。它通常用于计算机器人的运动和受力情况。Simscape Multibody:作为Simscape的一个子模块,专门用于建立和仿真机械系统,包括机器人。它允许用户构建包含连续、离散和事件驱动系统的复杂物理模型。 3. SimMechanics/Multibody
玩转Matlab-Simscape(初级)- 05 - 基于Solidworks、Matlab Simulink、COMSOL的协同仿真(理论部分1)
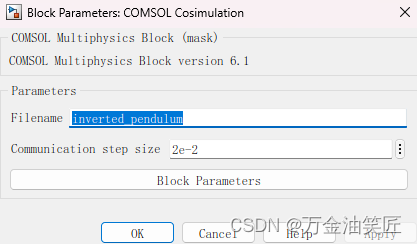
** 玩转Matlab-Simscape(初级)- 05 - 基于Solidworks、Matlab Simulink、COMSOL的协同仿真(理论部分1) ** 目录 玩转Matlab-Simscape(初级)- 05 - 基于Solidworks、Matlab Simulink、COMSOL的协同仿真(理论部分1) 前言一、COMSOL Multiphysics with Simu
Simscape Fluids -- 三位阀制动器(3-Position Valve Actuator)
3位阀致动器 致动器三位阀门 描述 这个3-位置 气门 致动器块表示致动器可以与方向阀一起使用来控制它们的位置。这致动器可以驾驶三位气门。该块被开发为基于数据表的模型,其所有参数通常都在目录或数据表中提供。关键参数是行程、开关和关闭时间. 该块具有与电磁铁A或B的激活信号相关联的两个信号输入。它产生可与机械平移或旋转推杆运动相关联的物理输出信号。将块输出连接到定向气门控制端口。 这个
【MATLAB】兔子机器人动力学模型解读(simulink中的simscape的各模块介绍)
1、动力学模型 Rectangular Joint 控制平面上(x,y轴)的移动,去掉以后,机器人在原地翻滚不移动 Rigid Transform 坐标转换,B站视频已收藏 去掉,机体与地面贴合 此处的作用是设定机体的初始高度 Revolute Joint 旋转关节,掌管旋转自由度 Rigid Transform 4 上下分离 Rigid Transform

Simscape Multiboby学习笔记1——跟着官网学Multibody
文章目录 一. 引言二. Simscape Multibody自学之路三. 本教程的目录 一. 引言 最近在倒腾Matlab的动力学仿真,起因是看到有人推荐Matlab的multbody模块,一经了解之下简直惊为天人。作为一名Matlab的小粉,看到这么好用的模块简直不要太开心,之前用simulink搭飞行器的仿真模型,虽然能够仿真看到六自由度位移,毕竟不能可视化,还是很不够直观

【机器人】简记一下SimScape和SolidWorks导出三维文件操作
1.前言 今天帮一位同学将一个.STEP文件导入SimScape中进行仿真,因为自己很久没有导入新的模型了,一直在用旧模型,所以对导入文件的操作有点生疏了,在查了一些资料和碰壁之后想起来了,特此记录一下。 2.问题1:SW模板文件无效 在用SW打开.STEP装配体文件时,提示:solidworks the default templates are not valid,即模板无效,如果点击c

matlab/simulink中simscape模块集快速创建物理模型
在命令窗口输入命令: ssc_new 同时弹出以下两个界面: 可以看到Matlab已自动生成了模型所必须的模块,免去我们再一个一个去模块库中找的麻烦,非常方便!

Simscape Multibody简介与入门 (下)
Simscape Multibody简介与入门 (下) 转载自https://zhuanlan.zhihu.com/p/67768339 开头简介 下图是摆动导杆的机构简图: 其中曲柄1为主动件。总共有3个构件,4个低副(三个转动副一个移动副),该机构自由度为1。 下面介绍从CAD软件导出xml文件,再导入到simulink的工作流程。 CAD建模 首先,依据上面的机构简图,在
基于simscape的多体建模
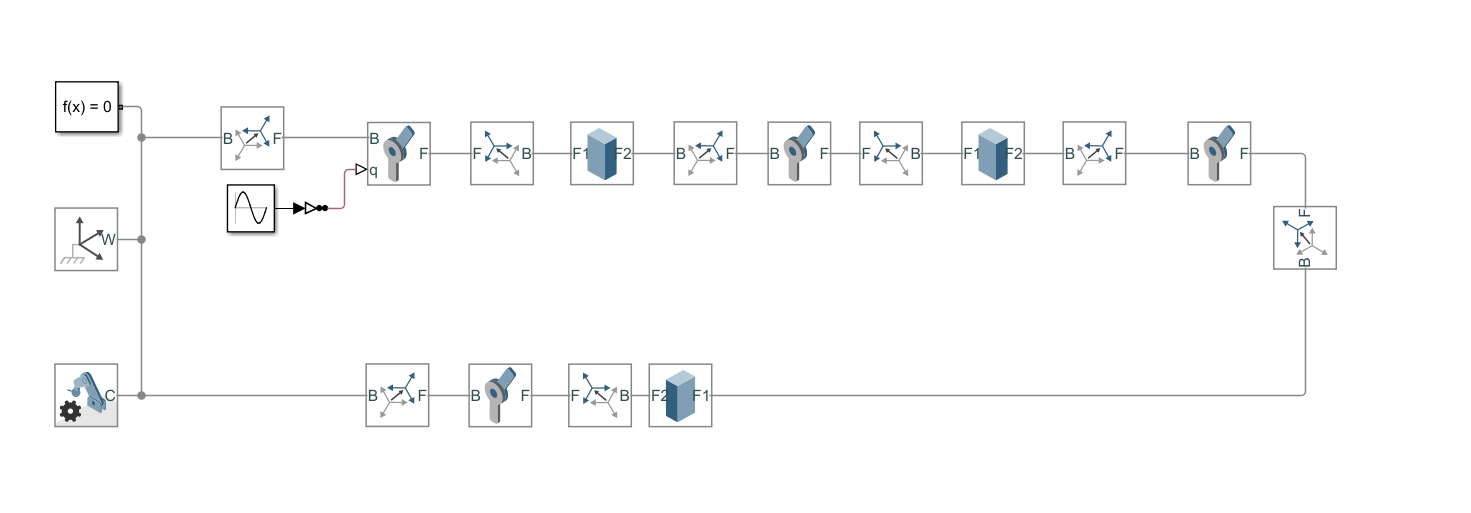
基于simscape的多体建模 1 简单介绍 从MATLAB命令行新建一个simscape的.slx文件: smnew %simulink new figure 1.1 s i m s c a p e simscape simscape必不可少的三部分:求解器 f ( x ) = 0 f(x)=0 f(x)=0,世界坐标系 w o r l d f r a m

Simscape —— 给关节加驱动信号 Simulink-PS Convertor 报错
1. 报错信息 2. 报错原因 Slover 配置不对,至于更深层次的原因,我还没搞清楚 3. 解决办法 1.把simulink-PS converter模块里面的Input Handling参数分别改成 Filter input,derivatives calculatedSecond-order filtering时间常数随意 2.模型配置参数(Modeling configu
html ur是什么意思_UR机械臂simscape正逆解仿真
最近在看相关的课程,把作业做一下,还是蛮有意思的。(课程代码所以涉及版权问题,经过同意后我上传代码) UR机械臂的物理模型文件是根据SolidWorks插件simscape导出的xml文件,课程直接提供的,博客不便给出,清楚整个建模原理就行。但个人还是觉得urdf文件好理解一些,可以人为控制各个坐标系的方向、位置还有质心的位置,不同机械臂的urdf文件可以自己在SolidWorks中建模