本文主要是介绍【机器人】简记一下SimScape和SolidWorks导出三维文件操作,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.前言
今天帮一位同学将一个.STEP文件导入SimScape中进行仿真,因为自己很久没有导入新的模型了,一直在用旧模型,所以对导入文件的操作有点生疏了,在查了一些资料和碰壁之后想起来了,特此记录一下。
2.问题1:SW模板文件无效
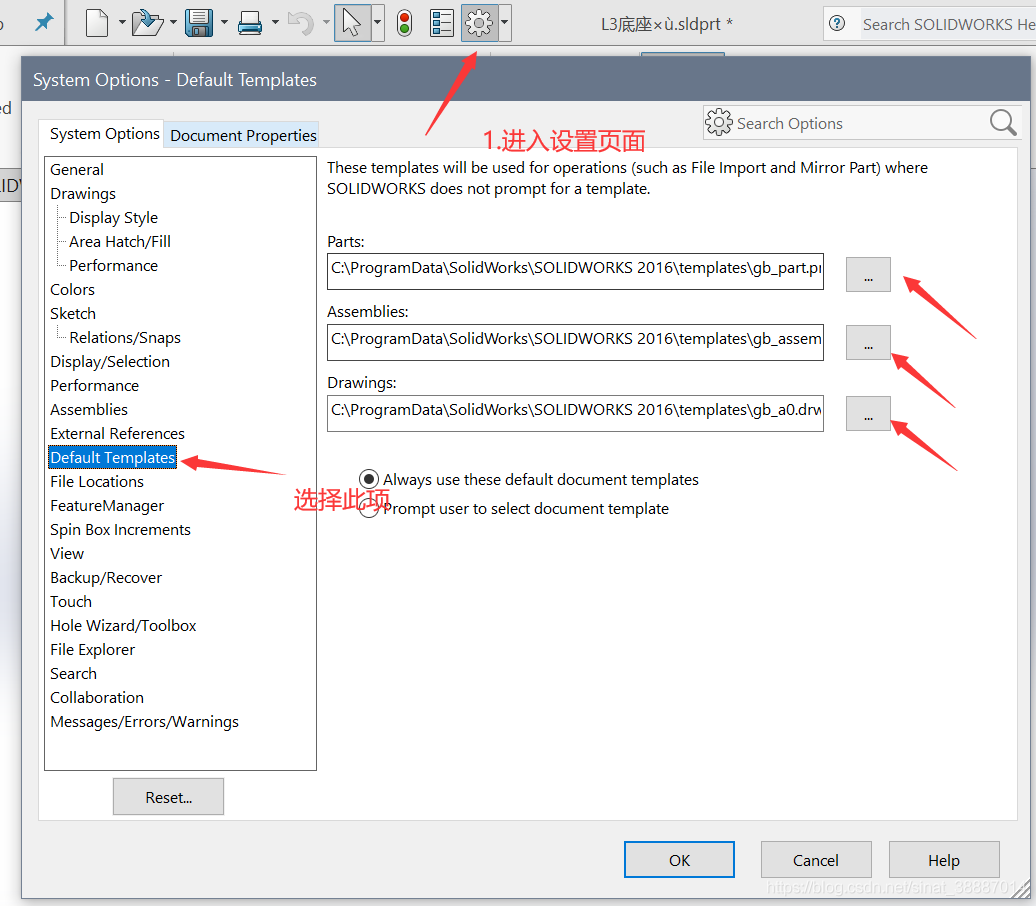
在用SW打开.STEP装配体文件时,提示:solidworks the default templates are not valid,即模板无效,如果点击continue,则显示为空白,此时需要对template文件路径重新设置一下即可
3.SW安装SimScape插件
可以参考这篇博客:SW设置SimScape插件
4.问题2:SW导出xml时报错
在设置好插件后,使用插件导出xml文件时,SW报错:solidworks could not start Matlab,这一步也很好解决,参考SW导出错误解决方法
- 使用管理员身份启动Matlab
- 输入命令:smlink_linksw
- 输入命令:regmatlabserver
- 再从SW进行xml文件导出操作即可
导出成功后如下图所示:

最后再使用:smimport('lqy.xml')
即可获得相应的仿真文件。
这篇关于【机器人】简记一下SimScape和SolidWorks导出三维文件操作的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





