serial专题

kernel 下串口serial输入输出控制,屏蔽log的输出
最近工作在调试usb虚拟串口,让其作为kernel启动的调试串口,以及user空间的输入输出控制台。 利用这个机会,学习下printk如何选择往哪个console输出以及user空间下控制台如何选择,记录与此,与大家共享,也方便自己以后翻阅。 Kernel版本号:3.4.55 依照我的思路(还是时间顺序)分了4部分,指定kernel调试console , kernel下printk con
ROS Serial相关失误总结
1、连接失败 Client Failed to receive data from server 10054 Failed to receive data from server 10054 Failed to receive data from server 10054 Send failed with error 10054 Failed to receive data from ser

Source Insight 3.x serial 序列号
Source Insight 3.5[3.x]序列号 SI3US-205035-36448 SI3US-466908-65897 SI3US-368932-59383 SI3US-065458-30661 SI3US-759512-70207

TX2 关闭console serial使用该串口
由于项目变更,GPU型号从Tx1变成Tx2,原来的硬件接口没有变,但是把原来UART0的console serial功能关闭变成一个串口使用的方法没法使用了。这就导致了数据通过该串口发送的数据变的很有问题,无法使用了。 经过测试,终于找到了解决的方法。 首先在虚拟机上,安装编辑设备树的软件: $sudo apt-get update $sudo apt-get install device

Golang笔记:使用serial包进行串口通讯
文章目录 目的使用入门总结 目的 串口是非常常用的一种电脑与设备交互的接口。这篇文章将介绍golang中相关功能的使用。 本文使用的包为 :go.bug.st/serial https://pkg.go.dev/go.bug.st/serial https://github.com/bugst/go-serial 另外还有一些常见的包如:tarm/serial https:/

platformio烧写STC8H1K08单片机程序失败:Serial port error: read timeout
问题 在使用platformio进行STC8H1K08单片机开发,在烧录编译好的程序时失败了,烧录过程日志如下: * 正在执行任务: C:\Users\23043036\.platformio\penv\Scripts\platformio.exe run --target upload Processing STC8H1K08 (platform: intel_mcs51; board:
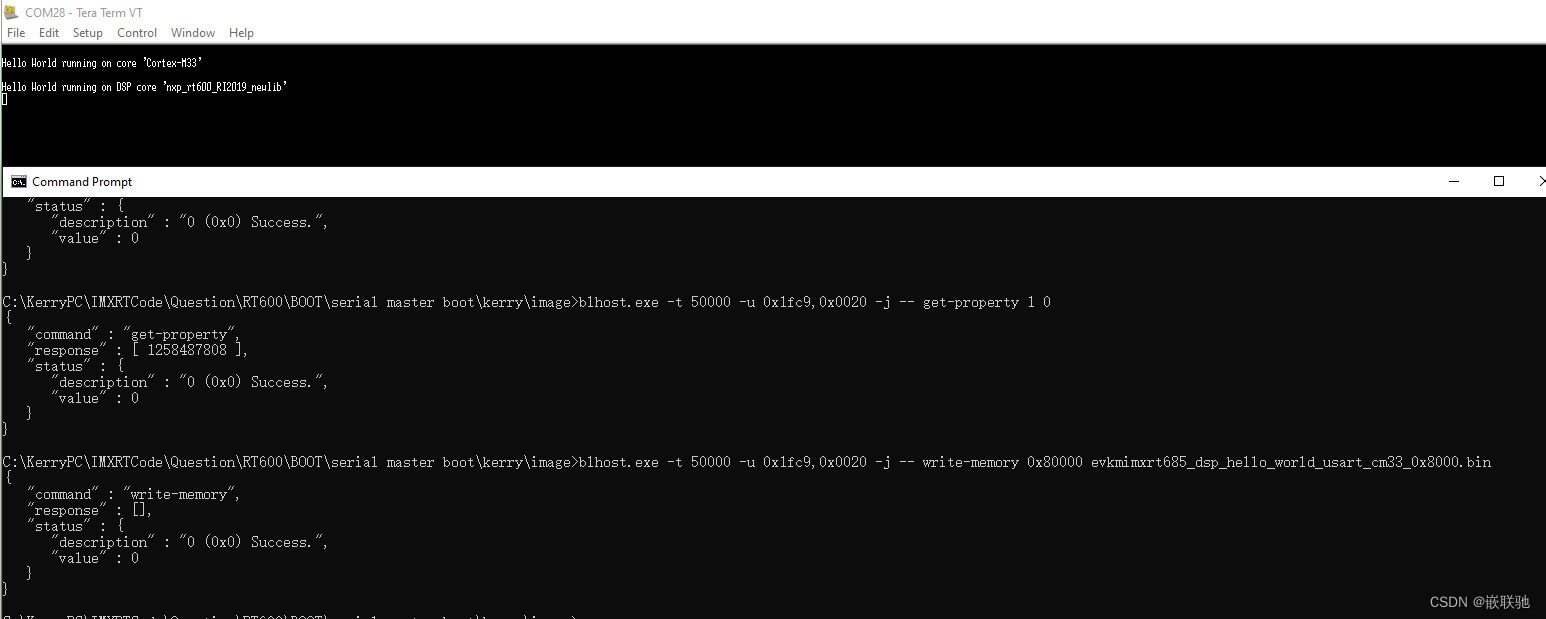
【经验分享】RT600 serial boot mode测试
【经验分享】RT600 serial boot mode测试 一, 文档描述二, Serial boot mode测试2.1 evkmimxrt685_gpio_led_output 工程测试2.2 evkmimxrt685_dsp_hello_world_usart_cm33工程测试 一, 文档描述 RT600的启动模式共支持4种: 1) Master boot mode 该
Java --- serial port communication example codes
/** public SerialBean(int PortID) 本函数构造一个指向特定串口的SerialBean,该串口由参数PortID所指定。PortID = 1 表示COM1,PortID = 2 表示COM2,由此类推。 public int Initialize() 本函数初始化所指定的串口并返回初始化结果。如果初始化成功返回1,否则返回-1。初始化的结果是该串口被Serial

65.Serial与Serial Old收集器、ParNew收集器、Paralell Scavenge与Parallel Old收集器、CMS收集器
目录 1.`Serial`与`Serial Old`垃圾回收器 - 串行回收2.`ParNew`垃圾收集器 - 并行回收3.`Paralell Scavenge(吞吐量优先)`与`Parallel Old`垃圾收集器 - 吞吐量优先4.`CMS`垃圾收集器 - 低延迟 1.Serial与Serial Old垃圾回收器 - 串行回收 Serial收集器采用复制算法、串行回收和STW
The Linux Serial Programming
用C程式模擬minicom,下面已經改成可以在我電腦跑的程式 把BAUDRATE 改成B115200 把MODEMDEVICE 改成/dev/ttyUSB0 轉載自http://www.linux.org.tw/CLDP/OLD/Serial-Programming-HOWTO-3.html ========================================
【INTEL(ALTERA)】为什么 F-Tile Serial Lite IV 工具包在链路初始化期间无法启用内部串行环回?
说明 F-Tile Serial Lite IV 工具包存在一个问题,即内部串行环回启用失败,并在执行链路初始化时输出不正确的寄存器值。这是因为我们在内部更改为 demo_jtag 在系统重置过程中检查 tx_pll_locked 和 rx_cdr_locked 状态。但完成后没有把它改回 phy_jtag 。 解决方法 要变通解决此问题,您需要按照以下步骤操作: 点击 “断言系统重置

python3有serial库吗
一、概述 pyserial模块封装了对串口的访问。 二、特性 ·在支持的平台上有统一的接口。 ·通过python属性访问串口设置。 ·支持不同的字节大小、停止位、校验位和流控设置。 ·可以有或者没有接收超时。 ·类似文件的API,例如read和write,也支持readline等。 ·支持二进制传输,没有null消除,没有cr-lf转换。 三、系统要求 python
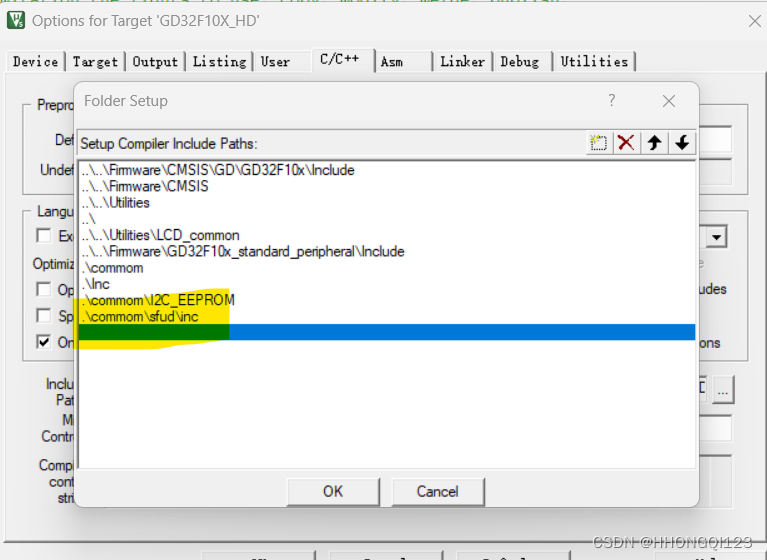
嵌入式系统应用-拓展-FLASH之操作 SFUD (Serial Flash Universal Driver)之KEIL移植
1 SFUD介绍 1.1 初步介绍 SFUD 是一个开源的串行 SPI 闪存通用驱动库。由于市面上有各种类型的串行闪存设备,每种设备都具有不同的规格和指令,因此 SFUD 的设计目的是解决这些差异。这使得我们的产品可以支持不同品牌和规格的闪存,增强了软件功能的重用性和可扩展性。此外,它有助于减轻闪存供应短缺或产品停产的风险。 代码连接如下:源码连接 所以选择flash只要采用spi或者qs
基于纯JavaScript实现的MODBUS-RTU(串口和TCP) modbus-serial
modbus-serial 如果你需要使用JavaScript来操作一台RS458的设备,那么你一定不能错过这个库 modbus-serial。 安装和使用 npm install modbus-serial 支持的功能码 功能码函数FC1 读取读线圈寄存器readCoils(coil, len) FC2 读离散输入寄存器readDiscreteInputs(addr, arg)FC3
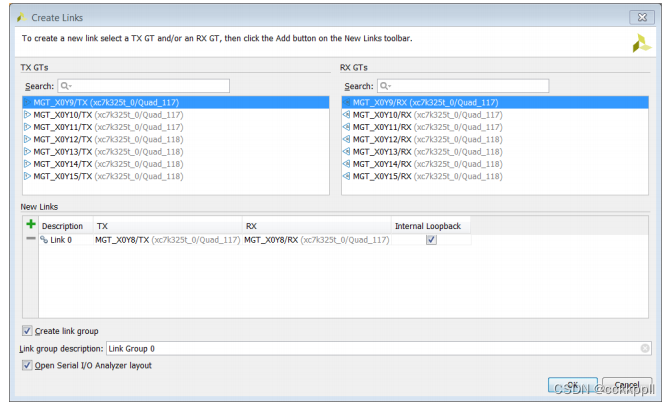
vivado Versal 串行 I/O 硬件调试流程、使用 Vivado Serial I/O Analyzer 来调试设计
Versal 串行 I/O 硬件调试流程 Versal ™ ACAP 无需再生成 IBERT IP , 因为使用系统内串行 I/O 调试所需的必要逻辑现已集成到 GTY 收发器架构内。使 用 GTY 收发器的任何设计均可用于串行 I/O 硬件调试。 Versal 串行 I/O 硬件调试流程具有 2 个不同阶段 : 1. 设计创
usb serial写入设备名称(device name)
有时候我们因为资源紧缺,比如测gms的时候让一台电脑跑一个手机,项目多的话电脑就不够用了,这时候就需要在一台电脑上跑多台手机,那怎么区分呢?device name是最好的区分方式,因为够简单不会出错误。那么如何写入呢,这就需要在代码端尽心修改了。 首先找到alps/vendor/mediatek/proprietary/bootable/bootloader/l
ros2中创建工程,访问serial串口
1、创建一个ros2工程包 ros2 pkg create --build-type ament_cmake ros2_demo --dependencies rclcpp std_msgs 2、在工程ros2_demo中创建include文件夹,在该文件内创建serial_test.h头文件 #include <serial/serial.h>#include "rclcpp/rclc
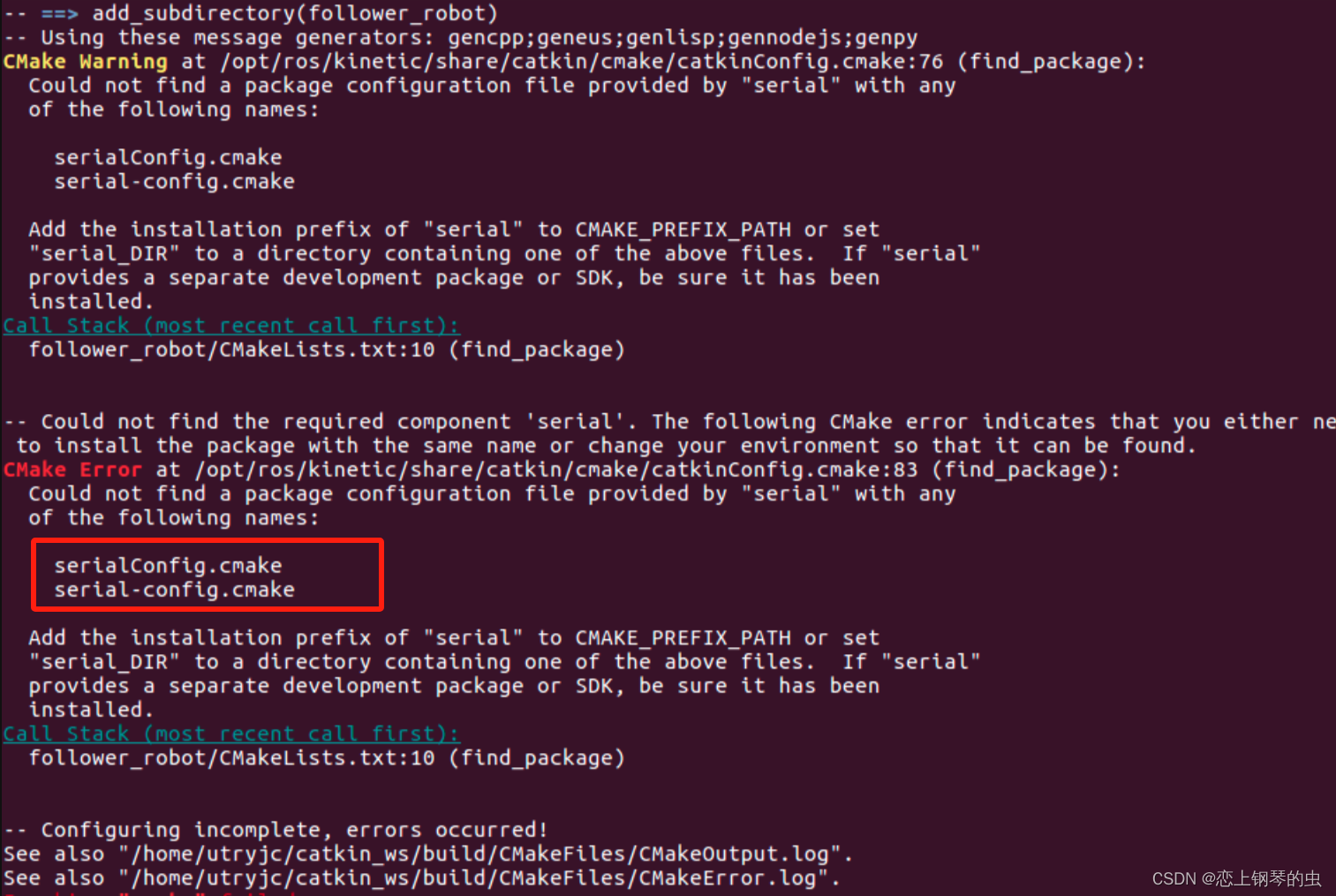
ros2中安装serial通信库
ros程序编译中出现的问题can’t find about “serial” ros2中使用serial错误说明 can’t find about “serial” 错误说明是 Could not find a package configuration file provided by “serial” with any of the following names: serialC
【PC工具】虚拟串口工具Configure Virtual Serial Port Driver6.9汉化版
微信关注 “DLGG创客DIY” 设为“星标”,重磅干货,第一时间送达。 调串口UART主从通信经常串口助手和今天要分享的虚拟串口工具,主要是用来找问题的,毕竟通信这事,有一点问题也是出不来的。多一个工具就多一个查找问题的方法,做设计调程序的过程就是解决问题的过程,问题解决了自然就成功了。 功能介绍 1、多个虚拟串口映射;2、收/发多线程架构发多线程架构;3、支持虚拟串口参数
Serial Port
SerialPort在电脑上面有同步与异步两种方式来访问, 在WinCE中只有同步。 在WinCE中如果没有设置超时,有可能在ReadFile堵住,导致程序无法退出。 在电脑上同步的实时性好一些。 那么使用异步是为什么哪?防止阻塞界面? 前些日子遇到的事,写了很多次了: 客户的笔记本电脑,同步不能用,只能异步。 而最终部署的设备,车载电脑,运行WinXP Embeded,
![[ESP32]:基于esp-modbus实现serial从机](https://img-blog.csdnimg.cn/direct/a2e95072f4f049339fc1eef7c9e9f84a.jpeg#pic_center)
[ESP32]:基于esp-modbus实现serial从机
[ESP32]:基于esp-modbus实现serial从机 开发环境: esp idf 5.1esp-modbus 1.0.13 使用如下指令添加组件,或者访问esp-modbus idf.py add-dependency "espressif/esp-modbus^1.0.13" 1.mb_register_area_descriptor_t 对于slave而言,最重要的定义你
![[ESP32]:基于esp-modbus实现serial主机](https://img-blog.csdnimg.cn/direct/8253cf30fd384e8b91880f4f51c63a05.jpeg#pic_center)
[ESP32]:基于esp-modbus实现serial主机
[ESP32]:基于esp-modbus实现serial主机 开发环境 esp idf 5.1esp-modbus 1.0.13 使用如下指令添加组件,或者访问esp-modbus idf.py add-dependency "espressif/esp-modbus^1.0.13" Device parameters 对于master而言,需要理解的主要是device parame
Windows上 C语言枚举com串口(serial_port),打印值和其编号(port)
宽字节版本 void enumerate_serial_ports() {HDEVINFO deviceInfoSet = SetupDiGetClassDevs(&GUID_DEVCLASS_PORTS, NULL, NULL, DIGCF_PRESENT);if (deviceInfoSet == INVALID_HANDLE_VALUE)return;SP_DEVINFO_DATA dev
C++ boost::asio::serial_port 串口通信类 使用 封装
串口一旦存在后,C++ boost::asio就当串口为一种流(文件流 )来使用。 C++的BOOST库中,通信库都在asio下,串口类结构为boost::asio::serial_port。串口通信由asio组件的serial_port类完成。BOOST库下的串口通信serial_port类的使用跟网络通信相似[网络通信 ],只是在进行串口通信前需要初始化串口。下面记录使用步骤: 1 s
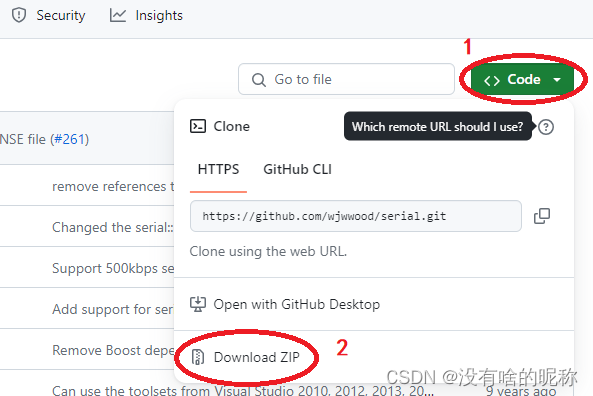
NVidia NX 中 ROS serial软件包的安装
自己装的ROS是noetic版本,受限于网络,直接用命令安装串口包不行。于是手动安装了一次。 1 下载源码 git clone https://github.com/wjwwood/serial.git 或者直接在浏览器里面输入 https://github.com/wjwwood/serial.git 2 解压 然后在serial(也可能是serial-main)目录下新建一

JVM垃圾收集器-serial.parNew,parallelScavnge,serialOld,parallelOld,CMS,G1
垃圾收集器 分代模型 适用于新生代: serial parNew parallel Scaavenge 适用于老年代: CMS serial Old(msc) paraller Old 分区模型 适用于超大容量: G1 分代模型 serial /serial Old收集器 1.单线程收集器 2.收集时会暂停其他线程(用户体验不好) 3.新生代是复制算法,老年代是标记整理算法 4.参数配