robotstudio专题
ABB RobotStudio学习记录(一)新建工作站
RobotStudio新建工作站 最近遇到 虚拟示教器和 Rapid 代码不能控制 视图中机械臂的问题,其实是由于机械臂和工作站不匹配。以下是解决方法。 名称版本Robot Studio6.08 新建一个”空工作站“; 在目标位置新建一个目标文件夹 C:\solution\test,用以后续存放该工作站(通常路径不能有中文);导入机械臂模型ABB模型库;入手爪设备导入模型库 -

RobotStudio结课作业——汽车覆盖件锻压/焊接/喷涂过程工作站
这学期选了机器人技术的课程,可以说是我们学院比较吸引人的选修课程,讲了一些六轴机器人的相关知识,老师最后给了两个作业给选,一个是论文(听上去分数就低),一个是robotstudio的小项目,于是和学霸淼淼一起合作,做了一个工作站。 一、工作站功能确定 由于学的铸锻焊,so我们得做个和专业相关的,最后决定了做一个汽车方面的工作站。汽车外形几乎全部都是锻压加工出来的,机器人工作环境好,因此我们选择
RobotStudio机器人码垛课程设计
一、任务需求 1、创建动态夹具(600*400*50) 2、创建物料(600*400*200) 3、起码按顺序码垛放置 4 个不同位置 二、软件常用操作及其快捷键 (推荐自己按这些步骤操作一下,能明白这些操作的具体意义) ctrl+鼠标左键:全局拖动 ctrl+shift+鼠标左键:切换视角 xyz三个方向拖动物品需要在基本菜单栏的Freehand中打开这个选项 二、系统创建过
RobotStudio软件:机器人变位机创建与仿真运行
目录 概述 带变位机机器人系统创建 变位机手动运行操作 激活变位机机械装置单元 编写变位机自动运行程序 添加变位机附加轴控制指令 仿真运行 本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注! 概述 变位机是机器人工作站中常用的一种设备,它除了具备工装夹具的工件安装定位功能以外,还能够通过自身的旋转机构旋转工件,使工件变换角度,便于机

MATLAB与Robotstudio建立socket通信(自我学习记续)中仿真模型的逆运动学和控制
1、前记:为了找到合适的逆解算法,作者不使用工具箱中的ikine函数或ikine6s,做数字书写的逆解,大致描述的推导如下 2、逆运动学描述:已知,末端位姿---->(p,[n, o, a]) 求解各关节角度配置---->q = [q1, q2,…qn] T 。 为了解决这个问题,通过运动解耦的过程求逆解。给出了逆运动学问题计算的最终方程如下:假设最终效应器的位置由变换矩阵给T,可以
ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02-
在ROS industrial介绍中,给出了ROS和常用机械臂的连接方式。具体信息可以参考:http://wiki.ros.org/Industrial ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02- 补充:https://github.com/robotics/open_abb open-abb-driver Contro

RobotStudio教程:ABB机器人TCP路径轨迹跟踪功能介绍与使用方法
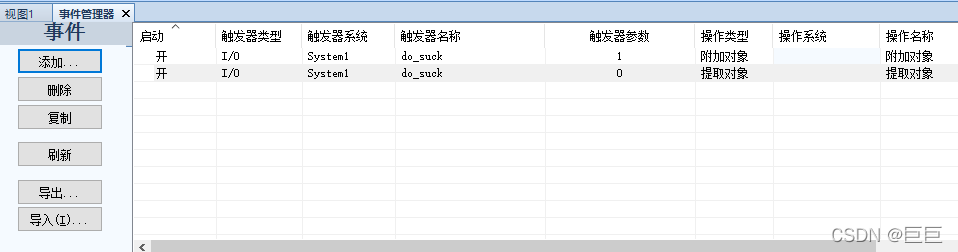
目录 功能介绍 机器人工作站创建 TCP路径轨迹全局跟踪 基于事件管理器的TCP路径轨迹局部跟踪 基于Smart组件的TCP路径轨迹局部跟踪 仿真运行 功能介绍 干涉检查是虚拟仿真工作中非常重要的一个步骤,尤其是机器人工具与工件、工装夹具之间的碰撞干涉,更是重中之重。 在RobotStudio中,可以使用TCP路径轨迹跟踪功能来实现ABB机器人的干涉检查,这个功能能够在机器人

ABB robotstudio双传送链工作站,源源不断物料,运用smart组件,简单好理解
ABB robotstudio双传送链工作站,源源不断物料,运用smart组件,简单好理解。id=649083982517&
RobotStudio软件:输送带创建功能介绍与使用方法
目录 功能说明 输送带与物料模型添加 输送带机构定义 物料在输送带上的传送配置 输送带物料传送仿真运行 本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注! 功能说明 RobotStudio软件中,输送带是可以直接通过“创建输送带”命令自主定义的,定义成功的输送带在仿真过程中能够自动复制物料,并完成物料的上料、传送与下料,与现实的输送带在
项目三 PLC与RobotStudio联合仿真激光切割工作站——组件制作
一、任务描述 本任务完成传送带组件的制作,抓取和放置事件的设置。 二、传送带组件的制作 (1)设计思路 传送带组件要将工件从一端传送到机器人端,是一个工件的直线运动,另外又要能多次运行,因此每次传送带启动时候要复制一个工件出来,将这个复制出来的工件进行直线移动,在到达传感器位置之后,要停止运动。 信号:启动传送信号——di_start 停止传送信号——di_stop 传感器信号——S