本文主要是介绍项目三 PLC与RobotStudio联合仿真激光切割工作站——组件制作,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、任务描述
本任务完成传送带组件的制作,抓取和放置事件的设置。
二、传送带组件的制作
(1)设计思路
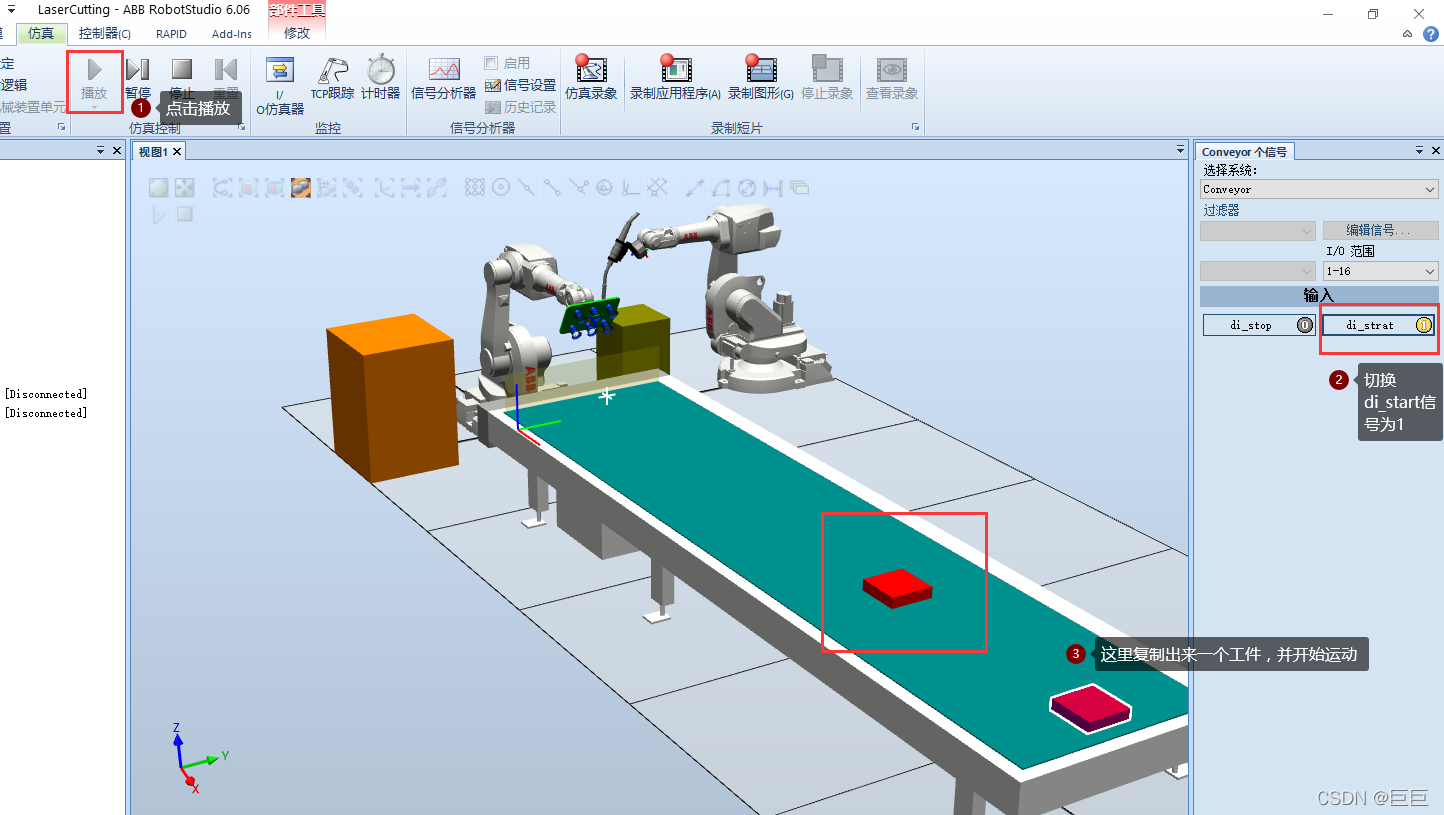
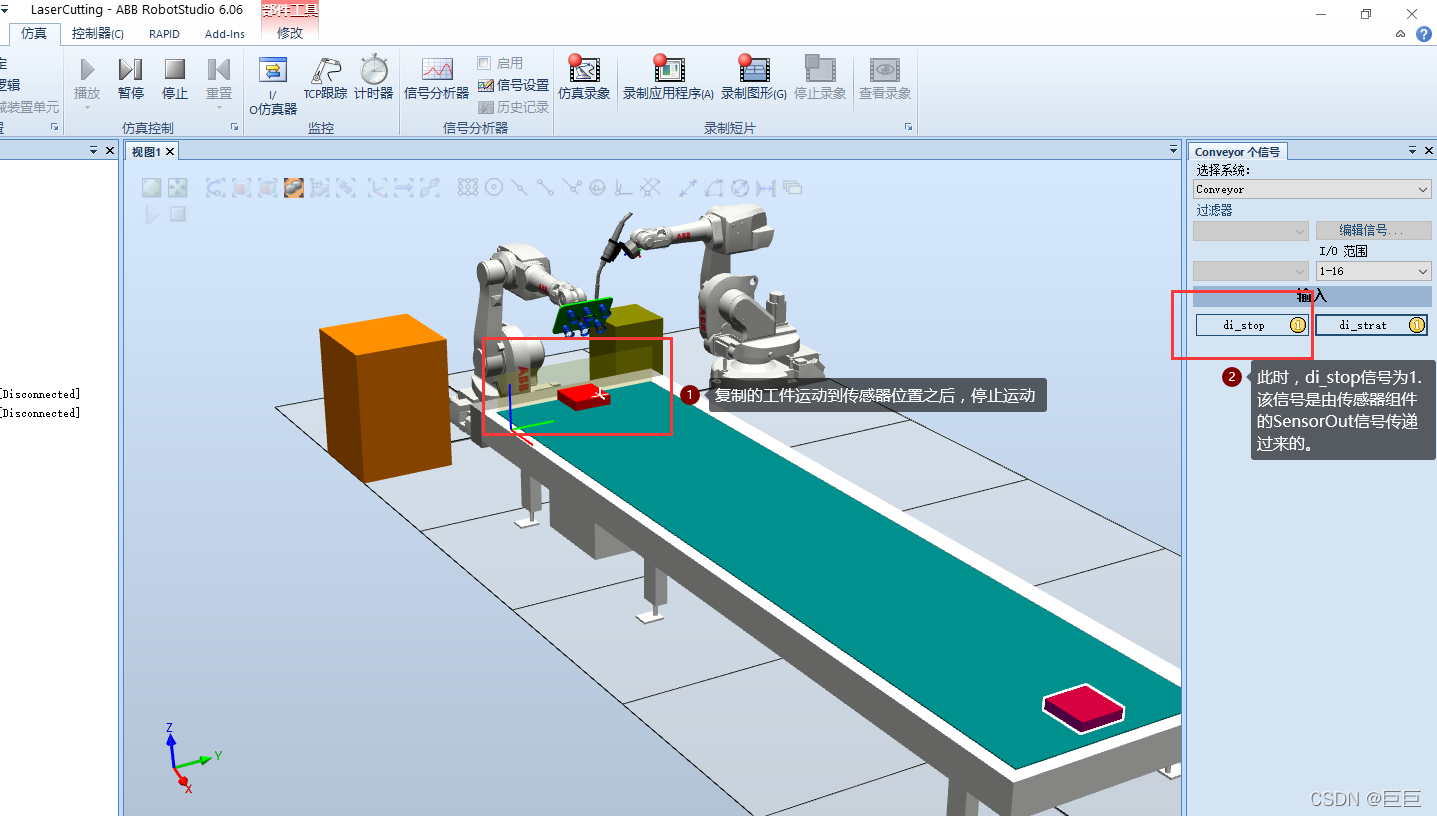
传送带组件要将工件从一端传送到机器人端,是一个工件的直线运动,另外又要能多次运行,因此每次传送带启动时候要复制一个工件出来,将这个复制出来的工件进行直线移动,在到达传感器位置之后,要停止运动。
信号:启动传送信号——di_start
停止传送信号——di_stop
传感器信号——SensorOut
组件:
(2)组件制作过程
步骤1)完善传感器组件

步骤2)创建Conveyor组件
新建Smart组件,命名为Conveyor。Conveyor组件建立之后,点击添加组件功能,添加如图的5个组件,Queue,Source,LinearMover和两个数字信号的逻辑运算。

步骤3)设置组件属性
设置Source的属性为

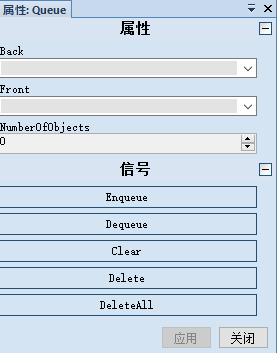
设置Queue的属性为默认属性
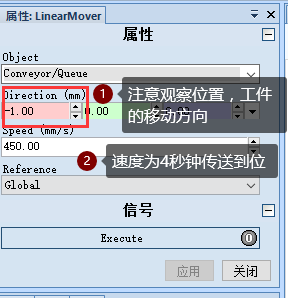
设置LinearMover的属性设置为
步骤4)进行逻辑设置

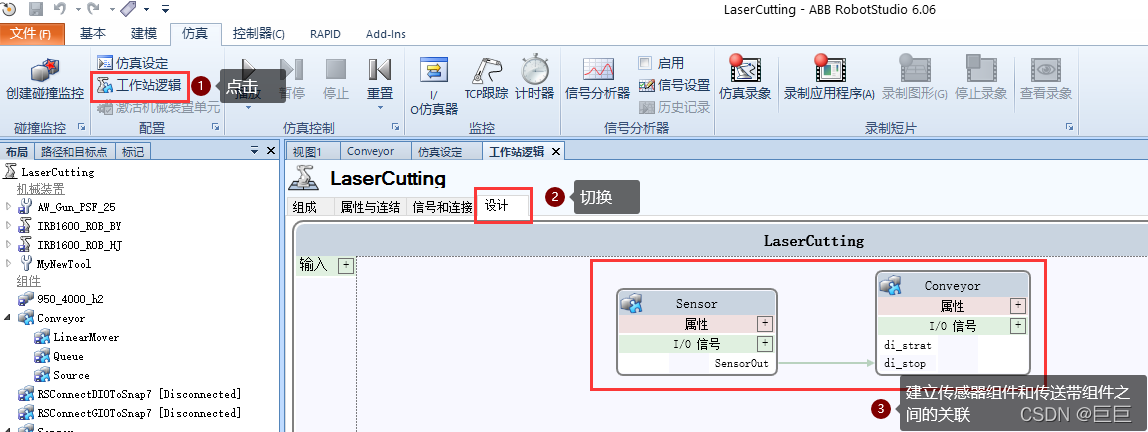
步骤5)设定工作站逻辑
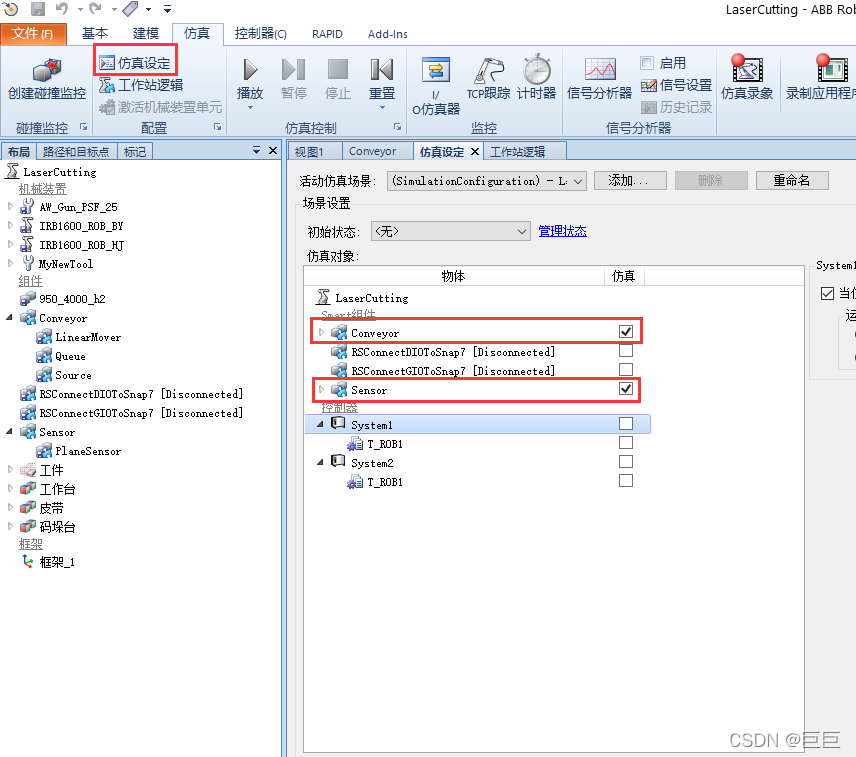
步骤6)测试逻辑
点击仿真设定,保留传感器组件和传送带组件进行仿真
步骤7)IO仿真器
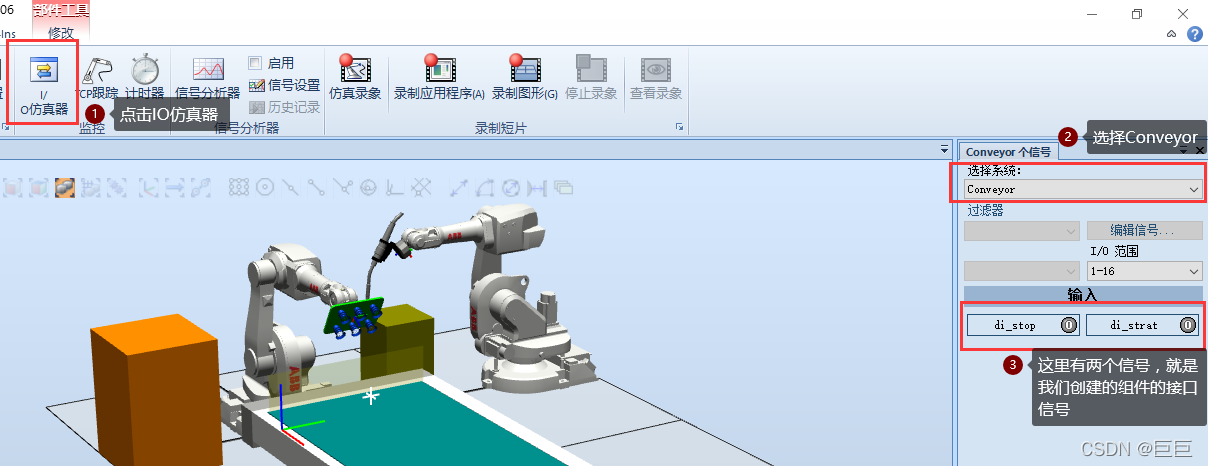
步骤8)开始仿真
如果想做的更符合真实的情况,可以将工件的可见性隐藏。大家可以自己调节。
三、吸盘卡爪的事件设置
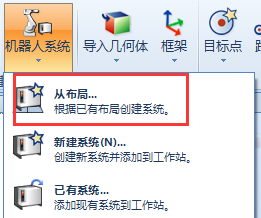
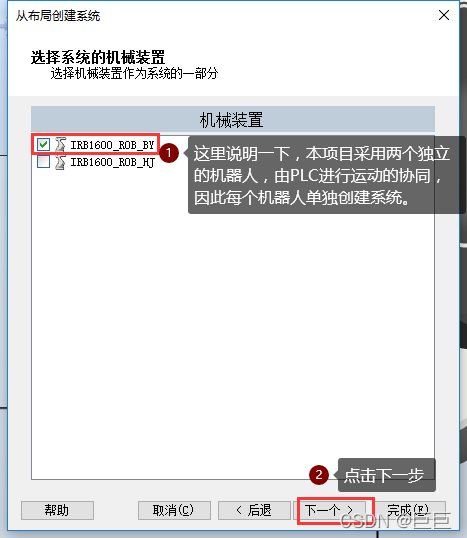
1. 给两个机器人创建系统
在基本页面下,点击机器人系统下的小三角符号,选择从布局...,开始为机器人创建系统。
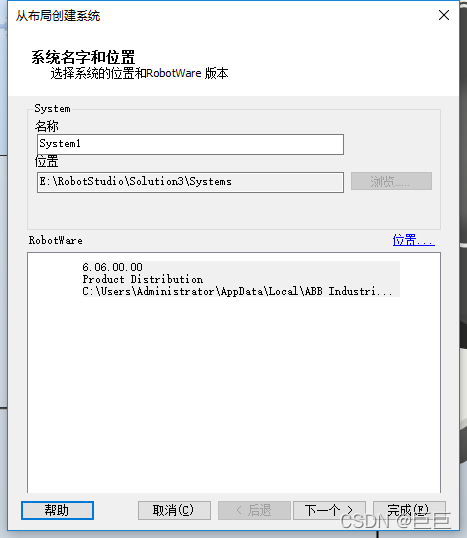
点击下一步,进行系统设置。
点击下一个之后,进入如下界面。点击选项...,进行系统配置。
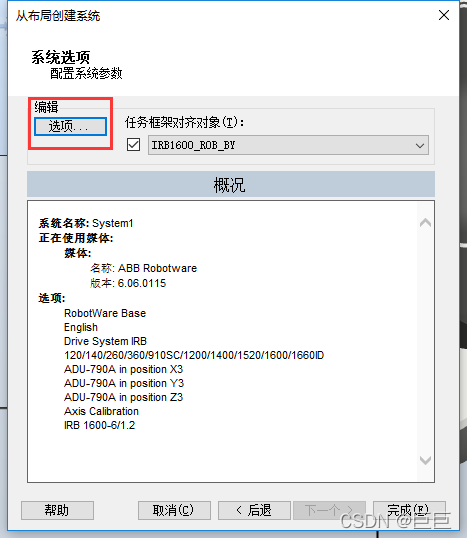
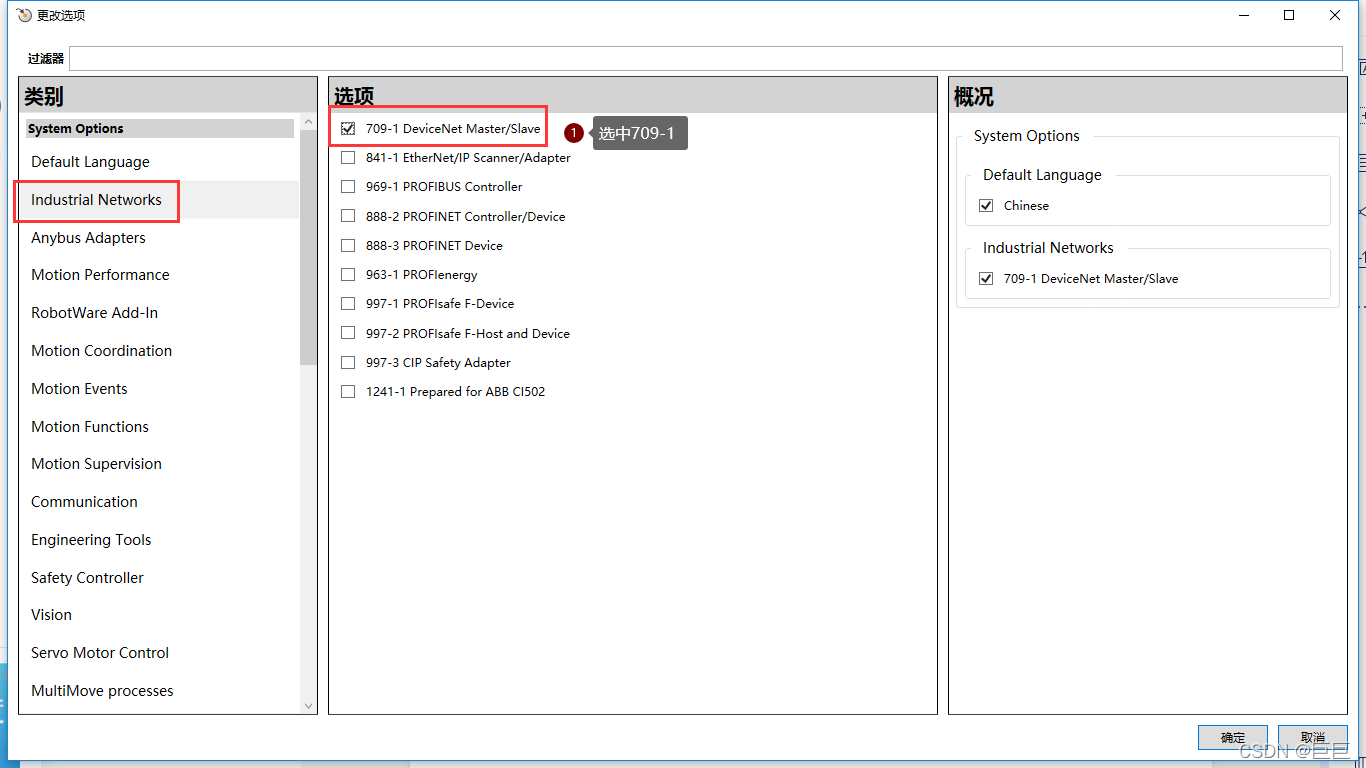
系统配置要配置两个关键参数:
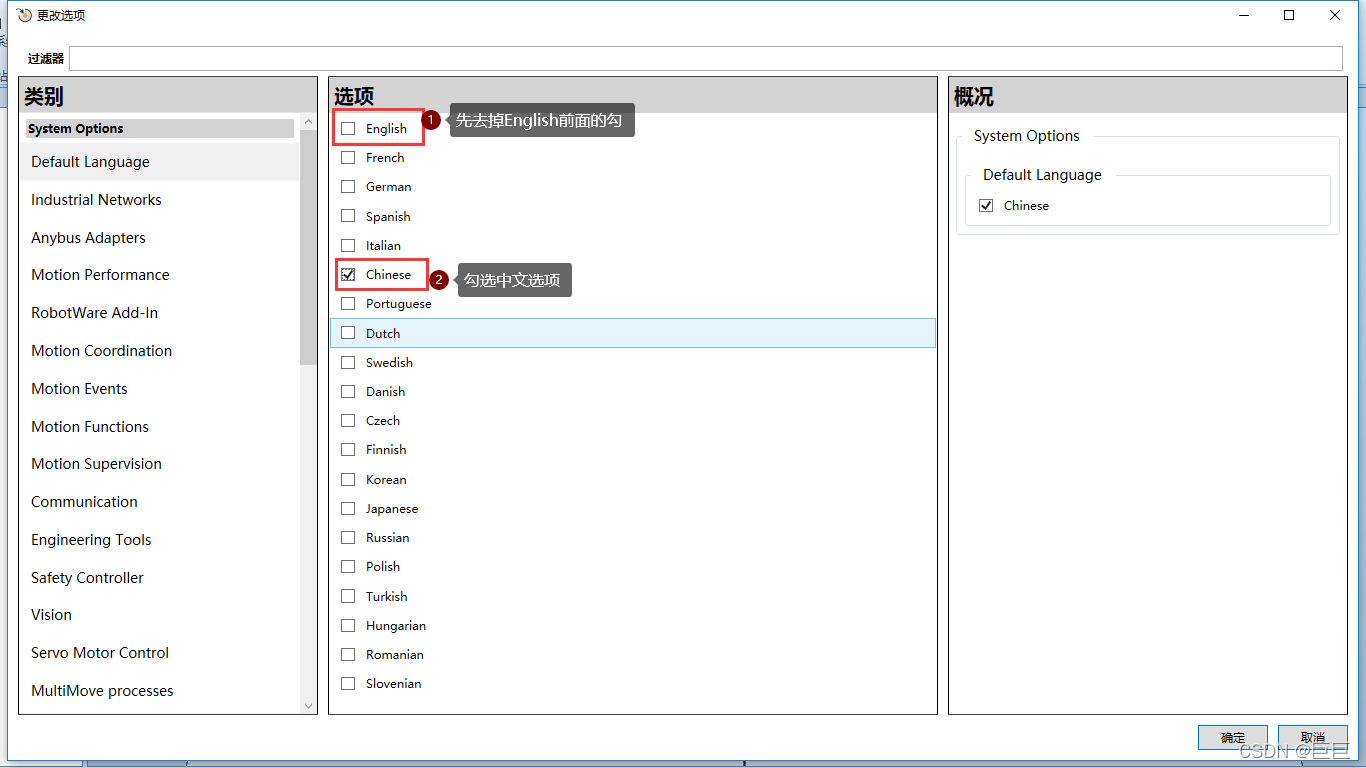
(1)语言设置
(2)设置通讯方式
点击确定,退出更改选项对话框,点击完成。
使用同样的方式和配置添加另一个机器人的系统。
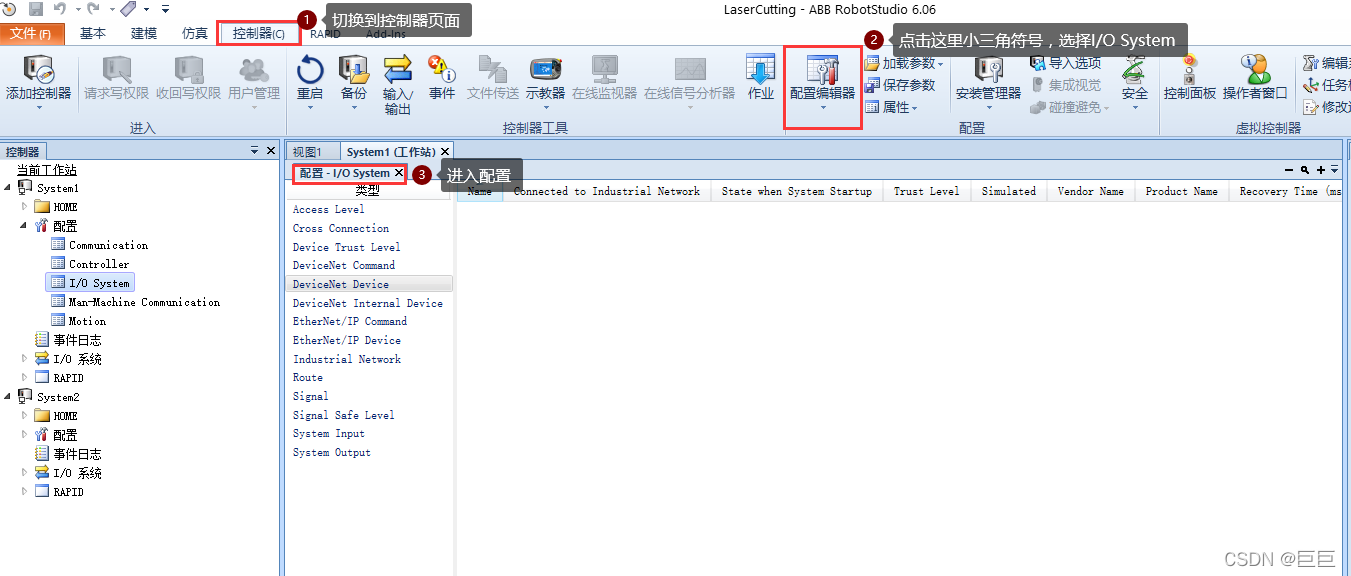
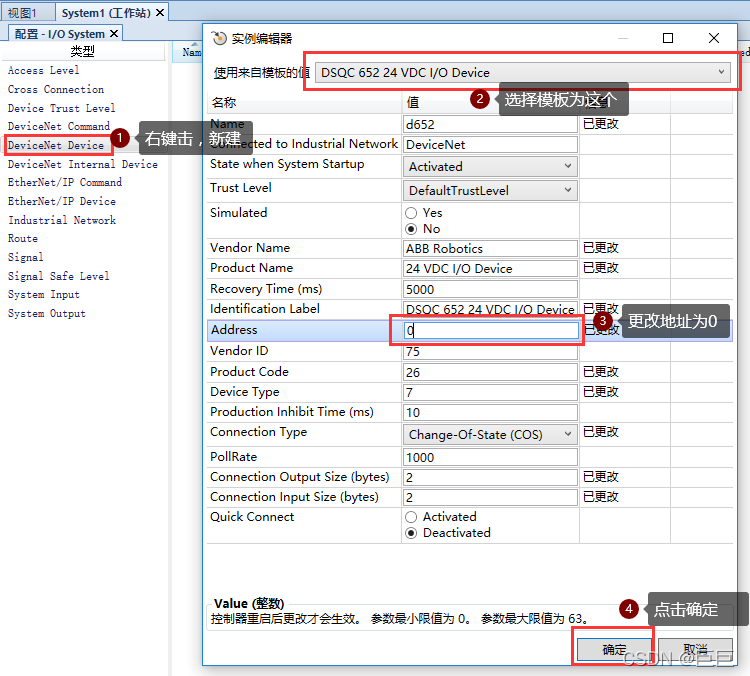
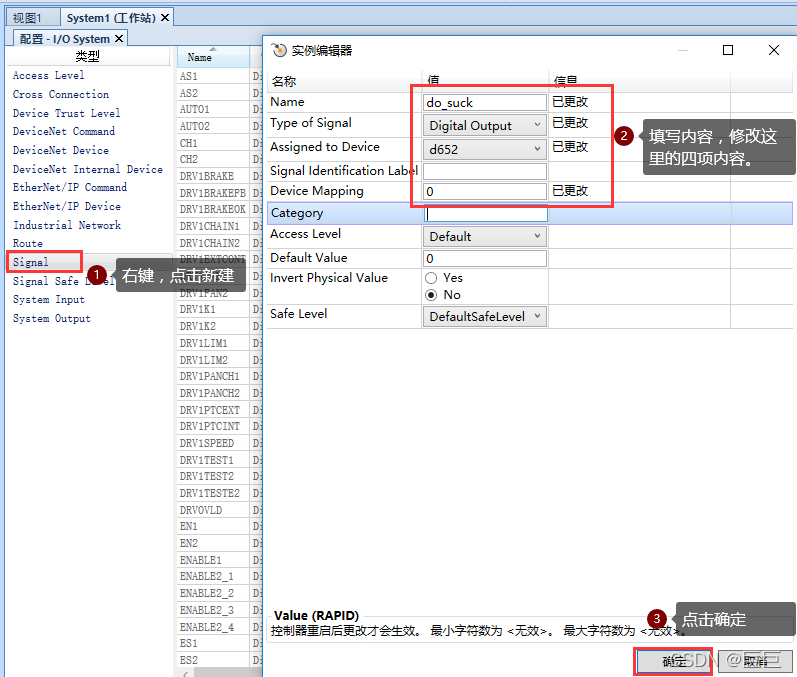
2. 配置搬运机器人信号
弹出这个窗口,点击确定,先不重启。
先选中Signal,然后右键,新建Signal。
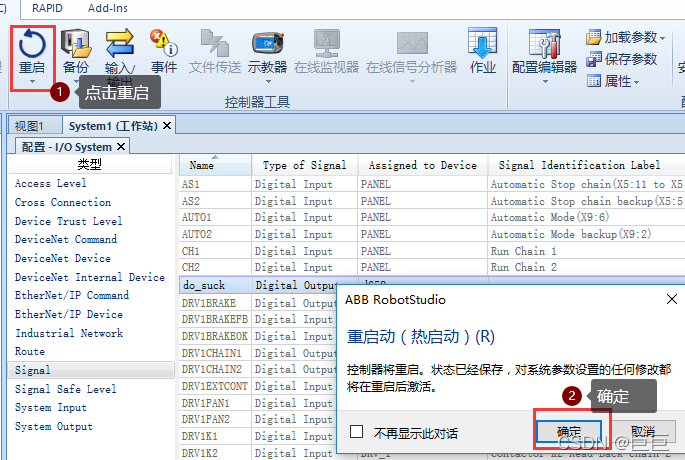
重启系统
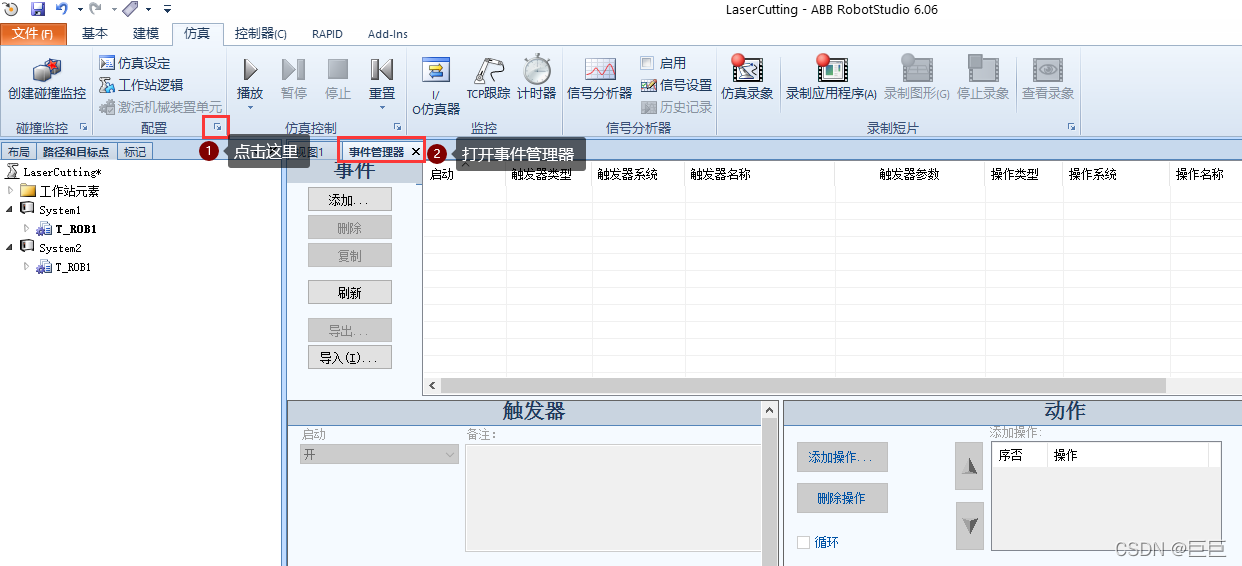
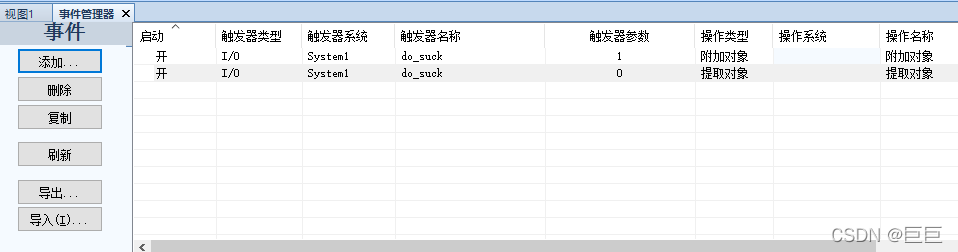
3. 配置抓取事件和释放事件
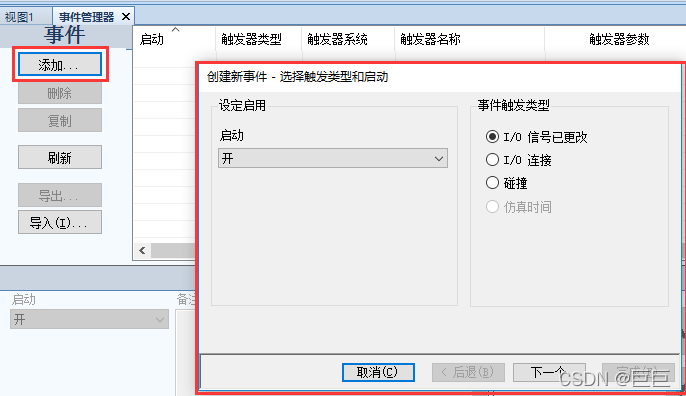
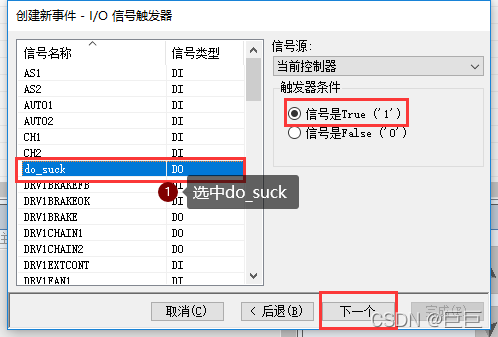
点击添加,打开创建新事件对话框。点击下一个
选中要设置的信号,触发器条件设置为1
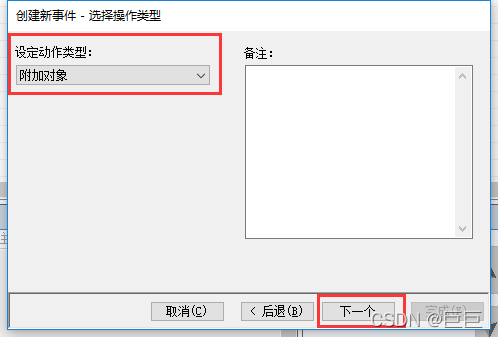
动作类型设置为附加对象
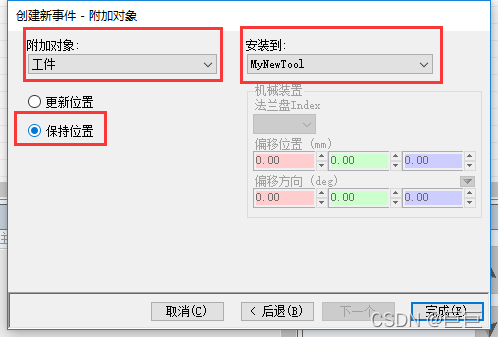
选中附加对象为工件,保持位置。安装到工具MyNewTool上。点击完成。
下面配置释放事件。
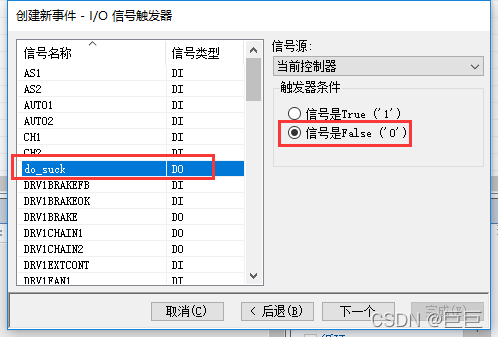
注意这里为提取对象。

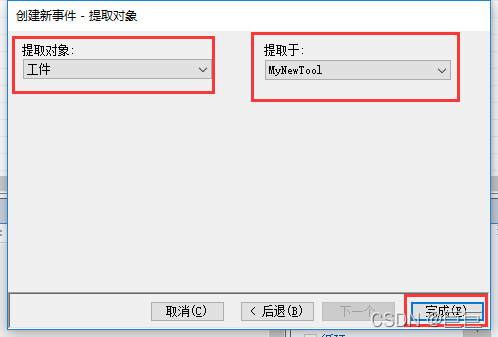
完成后的效果为
这篇关于项目三 PLC与RobotStudio联合仿真激光切割工作站——组件制作的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







