rigid专题

rigid_trans_object_model_3d----------对3D对象模型应用刚性3D转换
Description rigid_trans_object_model_3d对3D对象模型应用刚性3D变换,即旋转和平移,并返回转换后的3D对象模型的句柄。转换由Pose中给出的姿态来描述,形式如下,其中mcsi表示输入对象模型的坐标系,cst表示转换后模型的坐标系,例如,场景的坐标系(请参见转换/姿态和“解决方案指南III-C - 3D视觉”)。姿态可以使用create_pose、pose_
Monocular Model-Based 3D Tracking of Rigid Objects:2005年综述
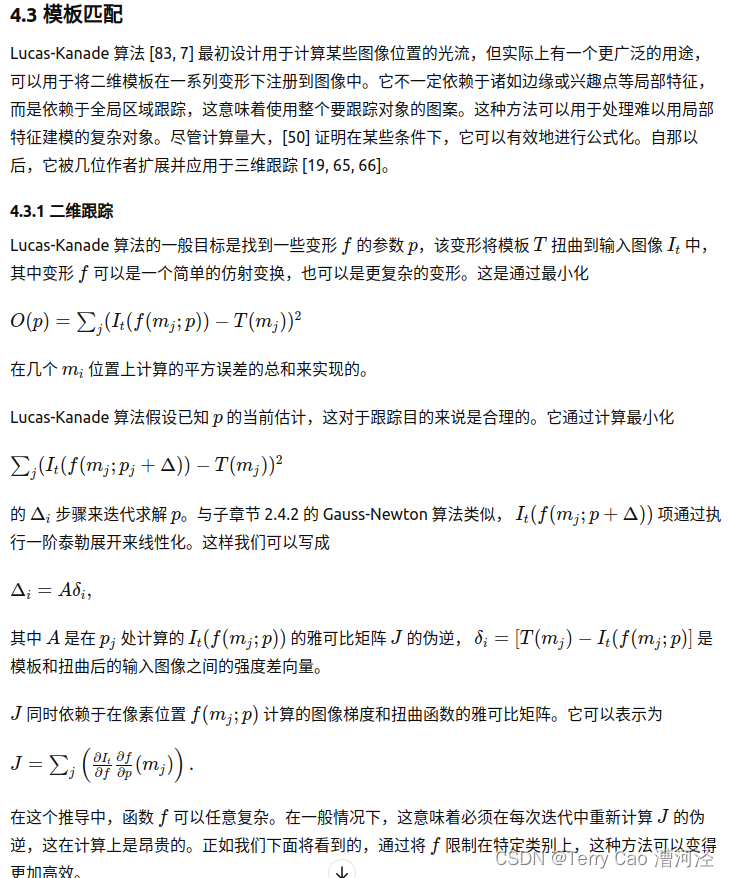
1 Introduction 在视频序列中跟踪一个物体意味着在物体或摄像机移动时,持续识别其位置。根据物体类型、物体和摄像机的自由度以及目标应用的不同,有多种方法可供选择。二维跟踪通常旨在跟踪物体或物体部分的图像投影,这些物体的三维位移会导致可以建模为二维变换的运动。为处理由于透视效应或变形引起的外观变化,需要一个自适应模型。它可以提供物体图像位置,表示为其质心和尺度或仿射变换 [141, 26

vector_angle_to_rigid(x1,y1,phi1,x2,y2,phi2,H)算子的用法
算子可以实现旋转和平移变换的矩阵,如果没有平移只有旋转,则(x1,y1),(x2,y2)相同为旋转中心,phi1,和phi2为旋转角度,H为得出的变换矩阵(如果有平移,前一个坐标为平移前,后一个为平移后)。旋转角度需要注意的是: 1.当坐标系为如下(左手坐标系) 将phi1设为旋转角度,phi2为0,此时表示顺时针,反之为逆时针。 如果是如下的坐标系,这种情况与上面相反,即将phi2设为旋转

MST:《Real-Time Tracking of Non-Rigid Objects using Mean Shift》 mean shift
前言 无参密度估计理论,无参密度估计也叫做非参数估计,属于数理统计的一个分支,和参数密度估计共同构成了概率密度估计方法。参数密度估计方法要求特征空间服从一个已知的概率密度函数,在实际的应用中这个条件很难达到。而无参数密度估计方法对先验知识要求最少,完全依靠训练数据进行估计,并且可以用于任意形状的密度估计。所以依靠无参密度估计方法,即不事先规定概率密度函数的结构形式,在某一连续点处的密度函数值可由
![[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-3(2) 刚体的位形 Configuration of Rigid Body](https://img-blog.csdnimg.cn/direct/aa377c21d07a4c6cabdb07b7f2663a3c.png#pic_center)
[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-3(2) 刚体的位形 Configuration of Rigid Body
本文仅供学习使用,总结很多本现有讲述运动学或动力学书籍后的总结,从矢量的角度进行分析,方法比较传统,但更易理解,并且现有的看似抽象方法,两者本质上并无不同。 2024年底本人学位论文发表后方可摘抄 若有帮助请引用 本文参考: . 食用方法 如何表达刚体在空间中的位置与姿态 姿态参数如何表达?不同表达方式直接的转换关系? 旋转矩阵?转换矩阵?有什么意义和性质?转置代表什么? 如何表示连续变
![[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-3(1) 刚体的位形 Configuration of Rigid Body](https://img-blog.csdnimg.cn/direct/694a7af86d2d4f3a95b50ac11ec46357.png#pic_center)
[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-3(1) 刚体的位形 Configuration of Rigid Body
本文仅供学习使用,总结很多本现有讲述运动学或动力学书籍后的总结,从矢量的角度进行分析,方法比较传统,但更易理解,并且现有的看似抽象方法,两者本质上并无不同。 2024年底本人学位论文发表后方可摘抄 若有帮助请引用 本文参考: . 食用方法 如何表达刚体在空间中的位置与姿态 姿态参数如何表达?不同表达方式直接的转换关系? 旋转矩阵?转换矩阵?有什么意义和性质?转置代表什么? 如何表示连续变
![[足式机器人]Part4 南科大高等机器人控制课 Ch08 Rigid Body Dynamics](https://img-blog.csdnimg.cn/direct/1677268e1f9f4a919827801b77b5c093.png)
[足式机器人]Part4 南科大高等机器人控制课 Ch08 Rigid Body Dynamics
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch08 Rigid Body Dynamics 1. Spatial Vecocity1.1 Spatial vs. Conventional Accel1.2 Plueker Coordinate System and Basis V
[足式机器人]Part4 南科大高等机器人控制课 Ch08 Rigid Body Dynamics
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch08 Rigid Body Dynamics 1. Spatial Vecocity1.1 Spatial vs. Conventional Accel1.2 Plueker Coordinate System and Basis V
[足式机器人]Part4 南科大高等机器人控制课 Ch03 Operator View of Rigid-Body Transformation
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch03 Operator View of Rigid-Body Transformation 1. Rotation Operation via Differential Equation1.1 Skew Symmetric Matri
![[足式机器人]Part4 南科大高等机器人控制课 Ch02 Rigid Body Configuration and Velocity](https://img-blog.csdnimg.cn/direct/4d03b6ad193f40968f29c1577f121f8b.png)
[足式机器人]Part4 南科大高等机器人控制课 Ch02 Rigid Body Configuration and Velocity
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch02 Rigid Body Configuration and Velocity 1. Rigid Body Configuration1.1 Special Orthogonal Group1.2 Use of Rotation M
虚幻引擎(UE4) 刚体(Rigid Body)
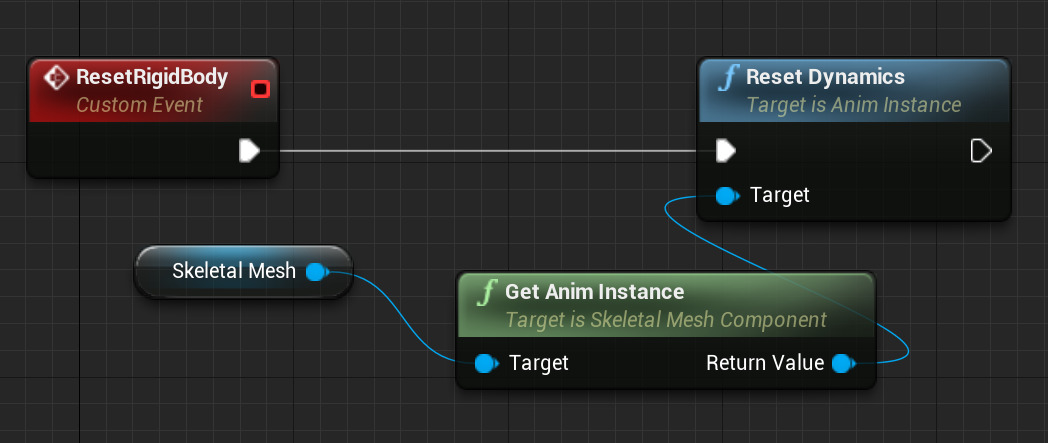
Rigid Body(刚体) 本篇讲述刚体如何作为一种轻量级的物理属性在动画蓝图中的运用。 Rigid Body骨骼控制节点(如下图)可以被用于高性能模拟轻量级的物理特性。Rigid Body可以被添加到Animation Blueprint(动画蓝图)中的AnimGraph(动画图表)。还可以和任意的Blend Nodes一起使用,使你从一种姿态切换到另一种模拟物理的状态。Character