rgbd专题

基于UE5和ROS2的激光雷达+深度RGBD相机小车的仿真指南(五):Blender锥桶建模
前言 本系列教程旨在使用UE5配置一个具备激光雷达+深度摄像机的仿真小车,并使用通过跨平台的方式进行ROS2和UE5仿真的通讯,达到小车自主导航的目的。本教程默认有ROS2导航及其gazebo仿真相关方面基础,Nav2相关的学习教程可以参考本人的其他博客Nav2代价地图实现和原理–Nav2源码解读之CostMap2D(上)-CSDN博客往期教程: 第一期:基于UE5和ROS2的激光雷达+深度RG

9 自研rgbd相机基于rk3566之qt框架开发tof图像处理线程
qt框架开发tof图像处理线程 tof线程功能及处理流程1 tof线程分为如下几个功能:2 tof线程的处理流程如下: tof线程qt程序详解1 接收界面启动停止信号。2 qt线程运行 tof线程程序示例1 线程头文件:pthread_tof.h2 线程源文件:pthread_tof.cpp tof线程功能及处理流程 1 tof线程分为如下几个功能: 1 v4l2采图部分,将

9 自研rgbd相机基于rk3566之qt框架开发rgb图像处理线程
qt框架开发rgb图像处理线程 rgb线程功能及处理流程1 rgb线程分为如下几个功能:2 rgb线程的处理流程如下: rgb线程qt程序详解1 接收界面启动停止信号。2 qt线程运行 rgb线程程序示例1 线程头文件:pthread_33d_sc2310.h2 线程源文件:pthread_33d_sc2310.cpp rgb线程功能及处理流程 1 rgb线程分为如下几个功能:

8 自研rgbd相机基于rk3566之sensor图像解析与AWB算法原理
自研rgbd相机基于rk3566之sensor图像解析与AWB开发 1、sensor-raw图解析介绍2、sensor-raw图解析程序详解常规raw10-to-raw16数据解析sc2310-raw10-to-raw16图像解析gc2053/gc2093 raw图像解析 3、sensor-awb及常用算法程序bayer bggr to rgb 图像解析简单白平衡算法灰度世界法白平衡算法完美
6 自研rgbd相机基于rk3566之深度计算库移植及测试
自研rgbd相机基于rk3566之深度相机计算库移植及测试 tof深度计算库移植1 移植步骤2 .so 动态库交叉编译3 动态链接库的测试 测试程序库调用头文件 w_33d_depth.h调用源文件 w_33d_depth.c tof深度计算库移植 1 移植步骤 深度计算库包括深度图像解析,读入eeprom标定参数进行深度矫正与深度还原,原始深度数据输出。 需要将深度库从win
6 自研rgbd相机基于rk3566之深度计算库程序详解
自研rgbd相机基于rk3566之深度计算库详解 1 tof深度计算库框架读入深度图像参数配置tof模组标定参数读入及解析深度计算函数接口 2 tof深度计算库程序详解深度计算程序头文件深度计算程序 源文件 1 tof深度计算库框架 读入深度图像参数配置 支持raw8/raw10/raw16 格式 /**************************RAW8 1280*
7 自研rk3566/rk3588+rgbd相机之单目双目相机标定库开发与移植
自研rk3566/rk3588+rgbd相机之单目双目相机标定库开发与移植 1、单目双目标定介绍2、单目双目标定测试程序自动棋盘角点棋盘格检测算法 auto_cam.h自动棋盘角点棋盘格检测算法 auto_cam.cpp 3、单目双目标定程序移植makefile测试程序接口 4、测试图像 1、单目双目标定介绍 RGBD相机进行图像与点云融合前需要进行单目相机和双目相机的标定。单目
5 自研rk3566/rk3588+rgbd相机之v4l2-rgb出图框架开发二
自研rk3566/rk3588+rgbd相机之v4l2出图框架开发二 1 v4l2框架介绍打开视频设备文件节点初始化视频设备:启动视频采集:停止视频采集:关闭视频设备节点: 2 linux-v4l2 rgb-sensor出图格式配置配置脚本如下:v4l2-sc2310-cap.sh配置脚本如下:v4l2-gc2093-cap.sh配置脚本如下:v4l2-gc2053-cap.sh 3 lin
kth-rgbd程序使用注意事项
一,经过修改,导入数据至rgbd_prod文件夹下,首先执行 bash ./main.sh -t frameID1 frameIDN (注:frameID1为起点,一般为1;frameIDN为终点,一般是数据数量)。然后执行 bash ./main.sh -m frameID1 frameIDN (frameID1&frameIDN与前相同)。 二,一般要对程序做如下修改: <1>. 去噪之后贴体
Python 基于深度图、RGB图生成RGBD点云数据
RGBD点云生成 一、概述1.1 定义1.2 函数讲解 二、代码示例三、结果示例 一、概述 1.1 定义 RGBD点云:是一种包含颜色和深度信息的点云数据。RGB代表红、绿、蓝三原色,表示点云中每个点的颜色信息;D代表深度,表示点云中每个点的相对于相机的距离信息。通过结合颜色和深度信息,RGBD点云可以提供更丰富的场景信息,对于目标识别、场景重建等计算机视觉任务具有重要作

奥比中光Astra RGBD ROS1配置(乐视RGBD)
早年买了一款乐视RGBD一直落灰,最近做一个机器人项目想重新使用起来。发现官方给的RGBD包和github上面的ros_astra_camera包并不能很好的驱动这款相机。研究了一下进行补足。 最终的结果是彩色,红外以及深度退昂均能实时读取。具体过程如下: 安装配置 安装依赖 sudo apt install ros-$ROS_DISTRO-rgbd-launch ros-$ROS
![IsADirectoryError: [Errno 21] Is a directory: ‘preds/STERE/RGBD_VST/.ipynb_checkpoints‘](https://img-blog.csdnimg.cn/ab50b9bf37db48b189ddccec553dd612.png)
IsADirectoryError: [Errno 21] Is a directory: ‘preds/STERE/RGBD_VST/.ipynb_checkpoints‘
报错: IsADirectoryError: [Errno 21] Is a directory: ‘preds/STERE/RGBD_VST/.ipynb_checkpoints’ 我在评估训练模型的时候显示上面的错误,后面通过网上查资料,发现这个错误是由于我创建了和已有文件夹同名的文件名,所以导致报错,建议使用不同的文件名来创建文件。可以排查一下上一级目录或者上上级目录是不是有重名
一起来做RGBD-SLAM(2)详细
高博链接:https://www.ncnynl.com/archives/201701/1251.html GitHub代码:https://github.com/gaoxiang12/rgbd-slam-tutorial-gx 1.按照高博的步骤,注意: 其中创建build文件夹的时候需要创建在part2目录下面,运行最后编译好的文件时,不能到文件的目录下面,要在命令行里面输入bin/xx
realsense d455 运行vins-mono,vins-rgbd
GitHub - STAR-Center/VINS-RGBD https://github.com/HKUST-Aerial-Robotics/VINS-Mono 读取realsense的内外参,也可以自己标定。 保证realsense-view安装成功,读取方法: 1.rs-enumerate-devices -c > realsense.txt Extrinsic from "Col
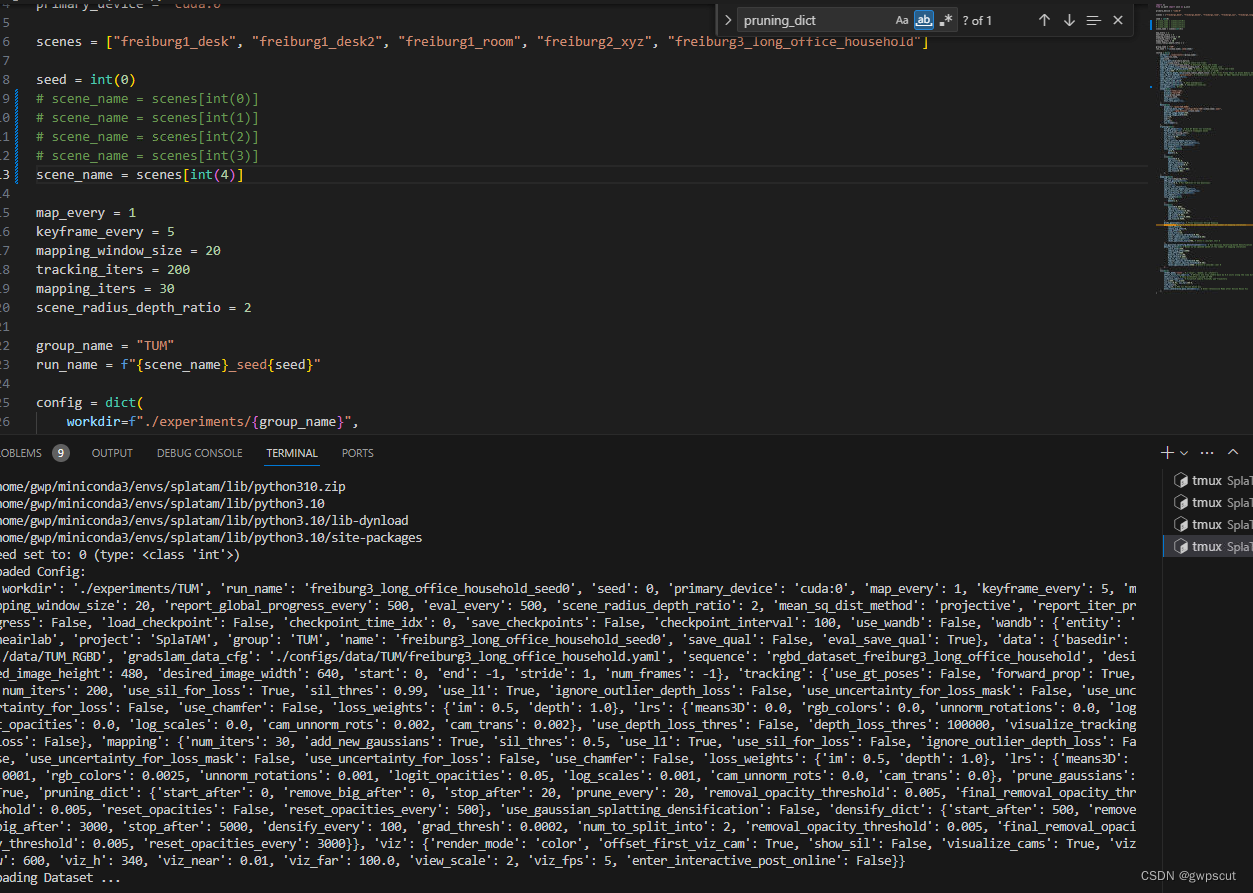
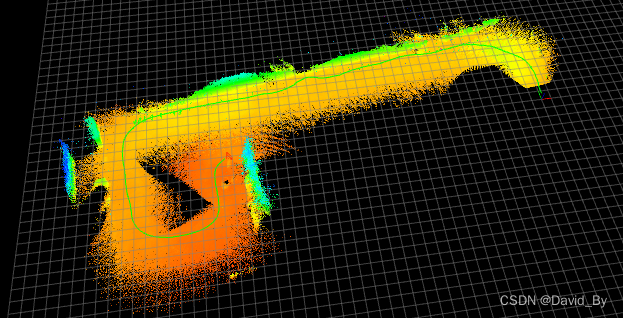
实验笔记之——基于TUM-RGBD数据集的SplaTAM测试
之前博客对SplaTAM进行了配置,并对其源码进行解读。 学习笔记之——3D Gaussian SLAM,SplaTAM配置(Linux)与源码解读-CSDN博客SplaTAM全称是《SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM》,是第一个(也是目前唯一一个)开源的用3D Gaussian Splatting(3DGS
RESLAM/ REVO 编译 实时RGBD基于边缘的slam系统
首先了解到了RESLAM: https://github.com/fabianschenk/RESLAM RESLAM在make过程中出现: /RESLAM/Relocaliser/ceresloopcloser.cpp: In member function ‘void RESLAM::CeresLoopCloser::BuildOptimizationProblem(RESLAM::Ce
[安装配置]Ubuntu 16.04 配置RGBD SLAMv2 ROS kinetic
主要安装配置参考GitHub的wiki,也可以参考这一篇,两篇一样的,推荐后者。一步一步照着安装。 主要会遇到的问题有两点: C++11的编译问题SET(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11") PCL1.8问题 ubuntu通过apt安装是1.7,会出现问题。通过源码编译安装,速度很慢。 创客智造有一篇文章 主要是修改kinect驱动

ICIP 2019 开源论文 | 基于注意力网络的RGBD图像语义分割方法
作者丨赵磊 单位丨北京林业大学硕士生 研究方向丨语义分割 本文已经被 ICIP 2019 (2019 IEEE International Conference on Image Processing) 接收,论文提出了一种全新的方法,基于时下流行的注意力机制,用于室内场景下的 RGBD 图像语义分割——通过利用图像深度信息,获得更好的语义分

ROS工作空间内利用rgbd_dataset_freiburg2_pioneer_360数据集配置ORB_SLAM2
ORB-SLAM2官方教程 一、准备工作:安装第三方依赖库 本人的依赖库均存放在文档目录里 1、安装Eigen sudo apt install libeigen3-dev 2、安装Pangolin git clone https://github.com/stevenlovegrove/Pangolin.gitcd Pangolinsudo apt install libgl