radar专题
![[POJ 1328] Radar Installation (区间贪心)](/front/images/it_default2.jpg)
[POJ 1328] Radar Installation (区间贪心)
POJ - 1328 给定若干个 x轴上方的点,要求最少的圆,使得每个点都被圆覆盖 其中圆心在 x轴上,半径为 D 有一个很直接的贪心思路,就是先考虑最左边未覆盖的点 在覆盖它的情况下,尽量把圆向左移。 这个做法是错误的,因为圆并不是矩形,例如以下数据 Input: 2 3 0 0 1 3 Output: 1 正确的做法是预处理出覆盖每个点的圆心的范围 然
POJ 1328 Radar Installation 雷达安装 贪心问题求解
题目链接: POJ 1328 Radar Installation Description Assume the coasting is an infinite straight line. Land is in one side of coasting, sea in the other. Each small island is a point locating in the sea

uvalive 2519 - Radar Installation(区间选点问题)
题目连接:2519 - Radar Installation 题目大意:给出n和半径r, 然后给出n个坐标, 现在要求在x轴选出最少的点, 以这些点为圆心, 半径为r画圆, 要求将所有点均在画的圆内。 解题思路:区间选点问题,就是变形了一下。 #include <stdio.h>#include <string.h>#include <math.h>#includ

(已开源-ICRA2023) High Resolution Point Clouds from mmWave Radar
本文提出了一种用于生成高分辨率毫米波雷达点云的方法:RadarHD,端到端的神经网络,用于从低分辨率雷达构建类似激光雷达的点云。本文通过在大量原始雷达数据上训练 RadarHD 模型,同时这些雷达数据有对应配对的激光雷达点云数据。本文的实验表明,即使是在未遇见过的场景以及存在严重烟雾遮挡的情况下,RadarHD也能生成丰富的点云数据。同时,这些生成的点云也能应用于现有的激光雷达里程计和建图方法中
论文解读--High-resolution Automotive Radar Point Cloud Imaging and Processing
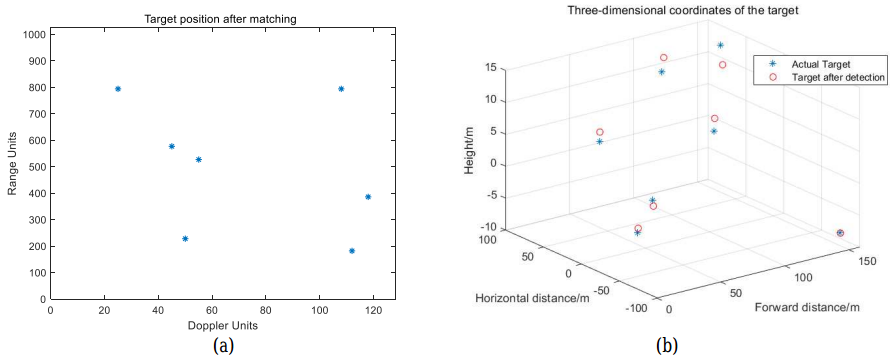
高分辨汽车雷达点云成像和处理 摘要 汽车雷达具有体积小、硬件成本低、全天候工作、高分辨率等公认的优点,是高级驾驶辅助系统(ADAS)必不可少的一类重要传感器。然而,低角度分辨率和低成像性能的限制很难满足下一阶段ADAS的需要。新兴的4D成像雷达采用多芯片级联多输入多输出(MIMO)技术,可以在方位角和仰角尺寸上实现高分辨率,提供高质量的三维点云图像。本文提出了一种集成高分辨率MI
POJ 1328 Radar Installation 贪心
题意:海中有许多岛屿,现在要再海岸上建立雷达,但是每个雷达的覆盖半径只有d,为了使每个岛屿都被覆盖到,求最少需要多少雷达。(建立坐标系,海岸为 x 轴,岛屿以坐标形式给出。 题解:先求出每个岛屿的被覆盖范围,即当岛屿被可以被覆盖时,雷达可以建立的最左位置及最右位置。将每个岛屿的最左位置升序排列,然后贪心求解。 #include <cmath>#include <algorithm> #inc
GNU Radio Radar Toolbox编译及安装
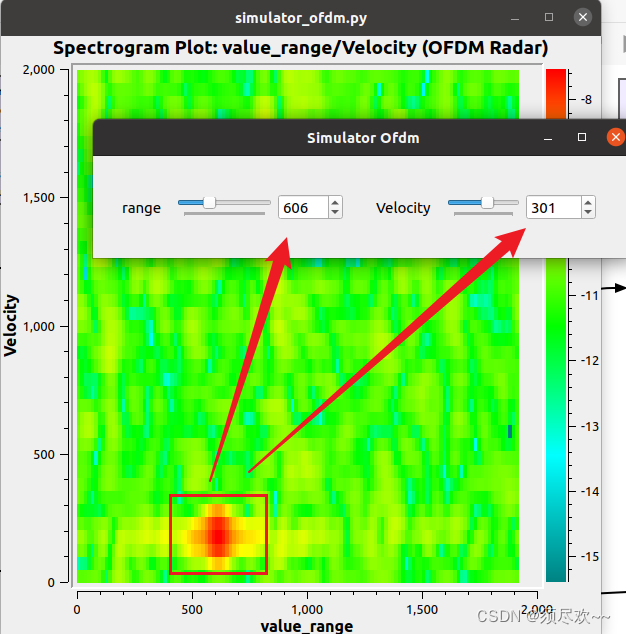
文章目录 前言一、GNU Radio Radar Toolbox 介绍二、gr-radar 安装三、具体使用四、OFDM 雷达仿真 前言 GNU Radio Radar Toolbox(gr-radar)是一个开放源码的工具箱,用于 GNU Radio 生态系统,主要目的是为雷达信号处理提供必要的工具和函数。 本文记录在 GNU Radio Radar Toolbox 的编

貪心::poj1328 radar installation poj2109 Power of Cryptography poj2586 Y2K Accounting Bug
貪心,就是步步為贏。 這是ACM知識表里基礎算法中的貪心部分,屬於水題範疇。 1. poj1328 radar installation 題目:照抄了。 Assume the coasting is an infinite straight line. Land is in one side of coasting, sea in the other. Each small island

2018北大暑校acm算法训练课程 Radar Installation 贪心
总时间限制: 1000ms 内存限制: 65536kB 描述 Assume the coasting is an infinite straight line. Land is in one side of coasting, sea in the other. Each small island is a point locating in the sea side. And any rad
![[深度估计]RIDERS: Radar-Infrared Depth Estimation for Robust Sensing](https://img-blog.csdnimg.cn/direct/59775cc2cdb84404b75b21fd2f2dbd31.png#pic_center)
[深度估计]RIDERS: Radar-Infrared Depth Estimation for Robust Sensing
RIDERS: 恶劣天气及环境下鲁棒的密集深度估计 论文链接:https://arxiv.org/pdf/2402.02067.pdf 作者单位:浙江大学, 慕尼黑工业大学 代码链接:https://github.com/MMOCKING/RIDERS 1. 摘要(Abstract) 恶劣的天气条件, 包括雾霾、灰尘、雨雪和黑暗, 给准确的密集深度估计带来了巨大挑战。对于依赖

数学建模--Radar图绘制
1.Radar图简介 最近在数学建模中碰见需要绘制Radar图(雷达图)的情况来具体分析样本的各个特征之间的得分与优劣关系,这样的情况比较符合雷达图的使用场景,一般来说,雷达图适用于展示多个维度的数据,并在一个平面上直观地呈现出不同维度的变化趋势,比较适用的场合如下: ∙ \bullet ∙综合评价: 雷达图是理想的工具,能够直观展示多个评价指标的得分,为综合评估提供清晰的整体
4D Radar~开源数据汇总
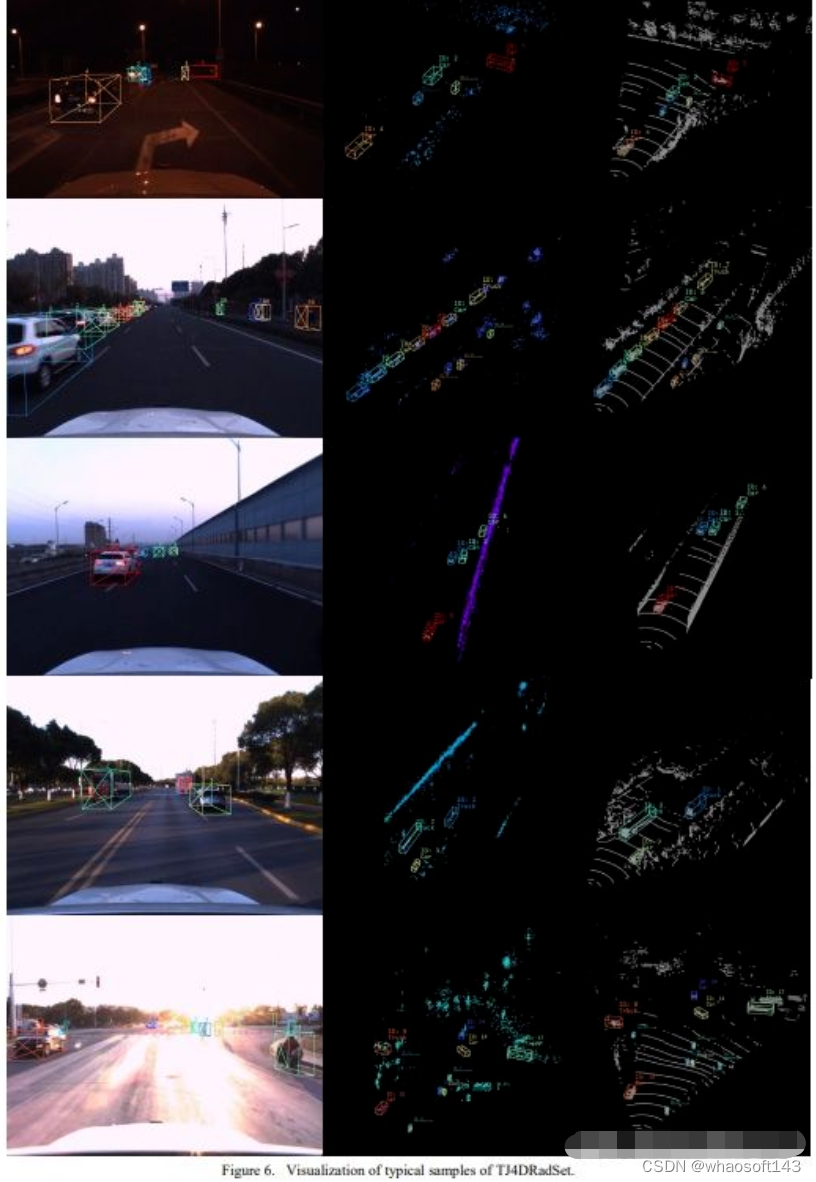
4D Radar在自动驾驶领域中越来越受关注,在价格和功能上都有比较大的竞争力,相关研究也逐渐open,今天为大家盘点下开源的4D Radar数据,为相关科学研究提供保障! 1Astyx 数据集链接:http://www.astyx.net 论文名称:Automotive Radar Dataset for Deep Learning Based 3D Object Detection A
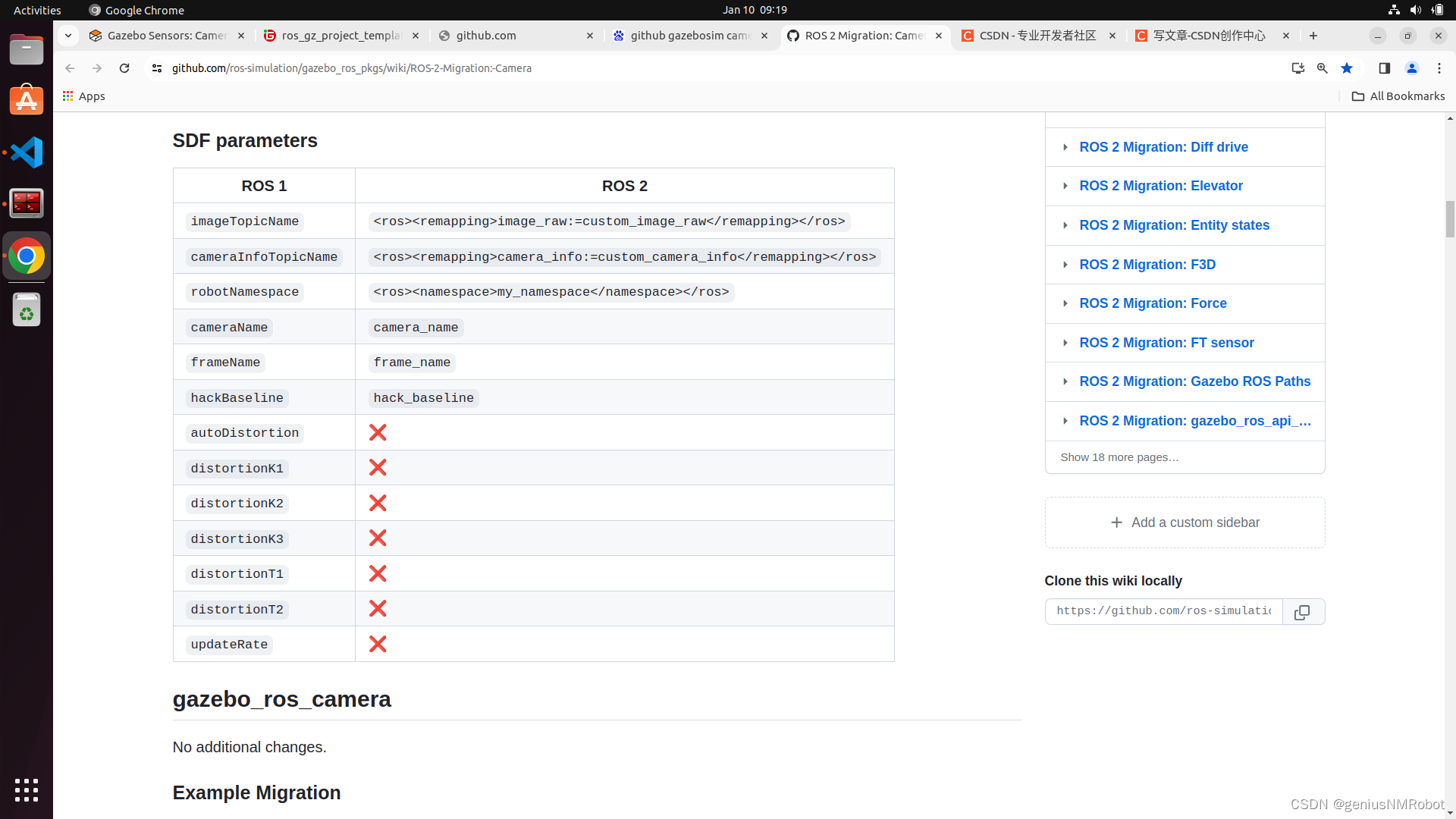
ros2 sensors :lidar, camera, radar,etc
Wiki - Gitee.com ROS 2 Migration: Camera · ros-simulation/gazebo_ros_pkgs Wiki · GitHub
poj 1328 Radar Installation 贪心 暑假第三题
去年大一的时候,看到这题,真心感觉自己不会,没思路,今天顺手就打出来了。。 下面的思路是其他博主写的的,拿过来借鉴 思路:该题题意是为了求出能够覆盖所有岛屿的最小雷达数目,每个小岛对应x轴上的一个区间,在这个区间内的任何一个点放置雷达,则可以覆盖该小岛,区间范围的计算用[x-sqrt(d*d-y*y),x+sqrt(d*d-y*y)];这样,问题即转化为已知一定数量的区间,求最小数量的点,使得
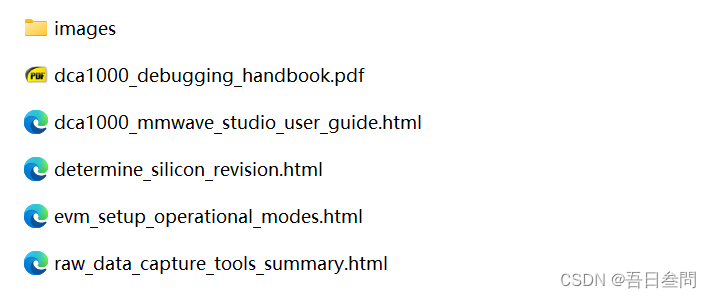
TI radar_toolbox中的文档说明
分享ti雷达工具箱中的文档,如下图所示 其中software_guides中内容如下 using_uniflash_with_mmwave.html:使用Uniflash烧录bin文件using_ccs_debug.html:使用CCS连接EVM板进行debugUnderstanding_UART_Data_Output_Format.html:输出数据的格式说明 其中hardwar
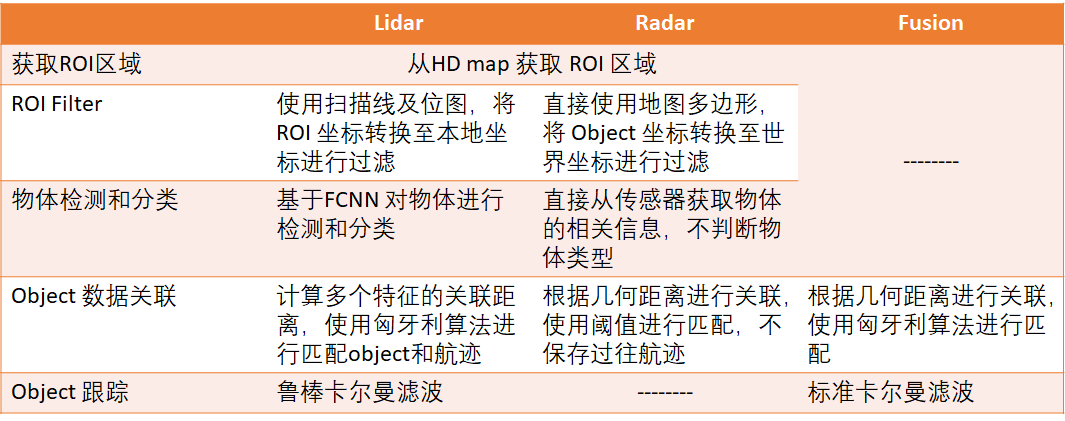
(转)Apollo 2.0 框架及源码分析(三) | 感知模块 | Radar Fusion
https://zhuanlan.zhihu.com/p/33852112 文章提到了几个点: 一、雷达radar部分: Apollo 2.0 的坐标体系是以 Lidar 为基准的。Apollo 可能认为 Velodyne 的位置是最准确的,因此 Camera 的位置标定参考 Velodyne, Radar 的标定参考 Camera。 阿波罗的感知几乎都依赖高精地图预先做ROI处理,以
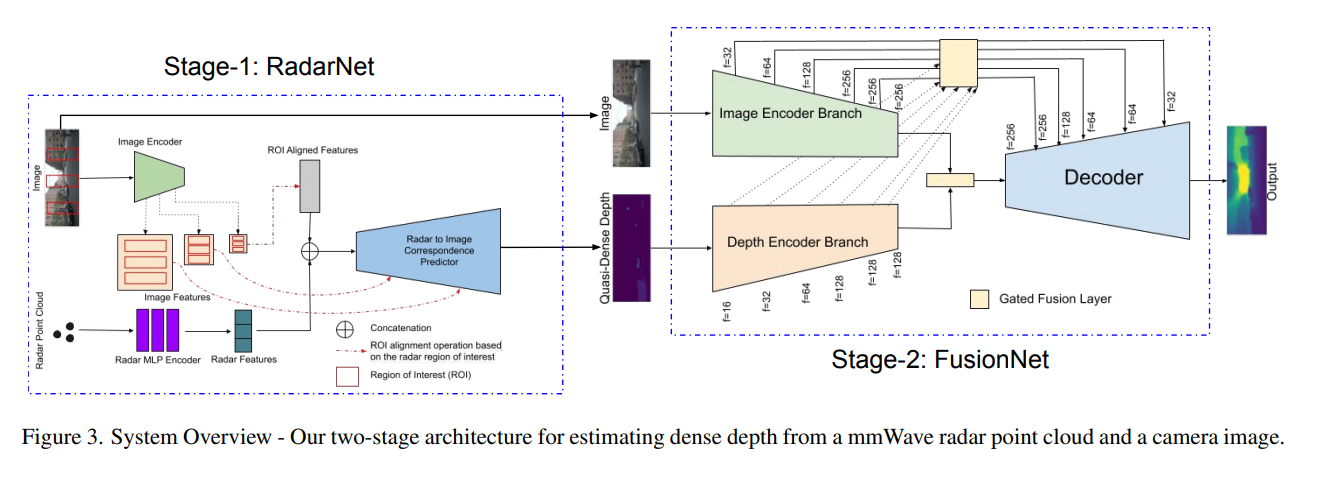
多模态感知论文阅读笔记 | CVPR 2023, Depth Estimation from Camera Image and mmWave Radar Point Cloud
原文链接:https://mp.weixin.qq.com/s?__biz=Mzg4MjgxMjgyMg==&mid=2247486213&idx=1&sn=c9680e0c959a6862bc92fea58029cb4c&chksm=cf51b9fcf82630ea7cc727665bbab30178e7652d74edc046f794111819948c5a21480172a50d#rd
HDU-2295___Radar —— 二分 + DLX重复覆盖
题目链接:点我啊╭(╯^╰)╮ 题目大意: n n n 个城市、 m m m 个雷达,最多可以用 k k k 个雷达,然后给出城市和雷达的坐标,要求雷达的最小覆盖半径,使得所有城市都被雷达覆盖??? 解题思路: 很清晰是一道DLX重复覆盖的题,本题的精度要精确到 1 e − 8 1e-8 1e−8,所以只能用二分,二分的可行性判断是所用的雷达数是否 ≤ k ≤k ≤
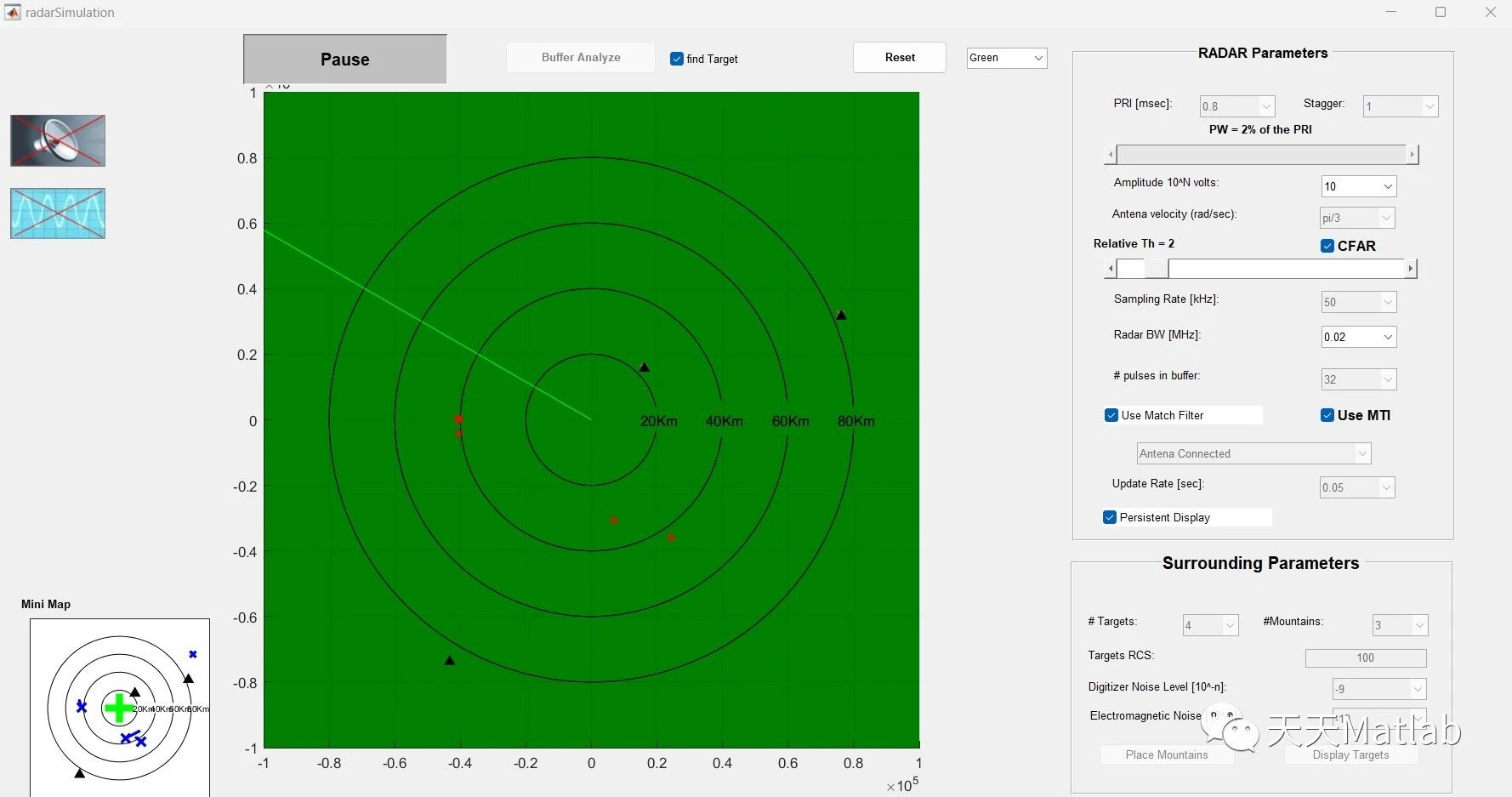
基于matlab模拟RADAR预警雷达
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 🍎个人主页:Matlab科研工作室 🍊个人信条:格物致知。 更多Matlab仿真内容点击👇 智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统 信号处理 图像处理 路径规划
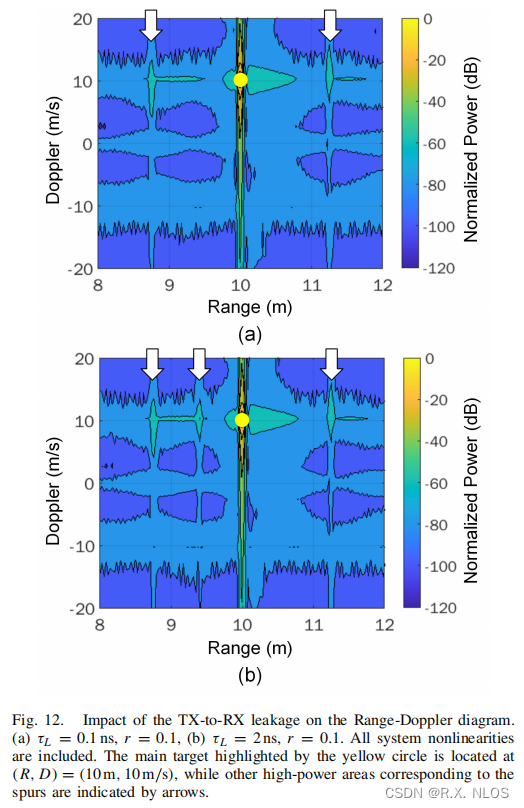
TRS 2023 | Spurs in Millimeter-Wave FMCW Radar System-on-Chip
原始笔记链接: https://mp.weixin.qq.com/s?__biz=Mzg4MjgxMjgyMg==&mid=2247486779&idx=1&sn=c75171844595150abc48d2dd59e7255f&chksm=cf51bfc2f82636d4e3f9c8526d0f25df1bea5496d9945d1e963961fea8c8fd630e7670b99afb#r