quaternion专题

Unity3D - 详解Quaternion类(二)
转自:http://www.cnblogs.com/tgycoder/p/5106463.html 四、Quaternion类静态方法 Quaternion中的静态方法有9个即:Angle方法、Dot方法、Euler方法、FromToRotation方法、Inverse方法、Lerp方法、LookRotation方法、RotateToWards方法和Slerp方法。关于静态的方法的使

Unity3D - 详解Quaternion类(一)
转自:http://www.cnblogs.com/tgycoder/p/5103966.html 一、简介 Quaternion又称四元数,由x,y,z和w这四个分量组成,是由爱尔兰数学家威廉·卢云·哈密顿在1843年发现的数学概念。四元数的乘法不符合交换律。从明确地角度而言,四元数是复数的不可交换延伸。如把四元数的集合考虑成多维实数空间的话,四元数就代表着一个四维空间,相对于复数为二维
UnityEngine.Quaternion.LookRotation详解
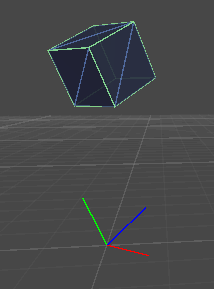
首先, 处于3D空间中的每个对象, 实际上都有自己的局部坐标系, 而旋转某个对象时, 其局部坐标系也会跟着旋转。 所以, 如果可以描述某个对象的局部坐标系(每根轴的朝向), 就可以表示该对象的旋转程度。 Quaternion LookRotation(Vector3 forward, Vector3 upwards); 这个函数就是根据对局部坐标轴的描述, 构造对应的代表旋转
【Unity学习笔记】第十六 World space、Parent space和Self space及Quaternion左乘右乘辨析
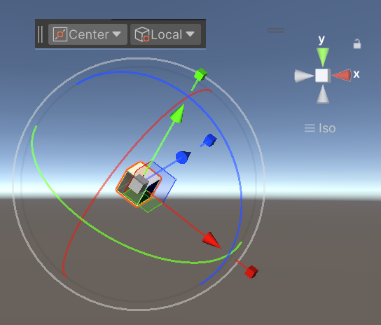
目录 World space、Parent space和Self space不同坐标系下的移动不同坐标系下的旋转——Quaternion左乘右乘的区别辨析总结 参考: Unity 世界坐标&局部坐标下的旋转Quaternion multiplication orderlocal space vs global space vs object space in unity3dTr

一个可复用的C++ 3阶实方阵类和4阶实方阵类(兼容与扩展了DX中的4阶实方阵类);四元数(quaternion)模板类的使用
一个可复用的C++ 3阶实方阵类和4阶实方阵类(兼容与扩展了DX中的4阶实方阵类) 部分DX矩阵函数的实现 namespace Han { FLOAT WINAPI D3DXMatrixDeterminant(CONST D3DXMATRIX *pM) { D3DXMATRIX mtx=*pM; FLOAT ret=Bsdet(&mtx(

UNITY 5.2 Quaternion 类
四元数其形式为 w + x i + y j + z k,其中i、j、k的關係如下: i2 = j2 = k2 = -1 i * j = k = -j * i j * k = i = -k * j k * i = j = -i * k 还可以表示为:q = [w, x, y, z] = [S, V] 定义四元数q = w + x i + y j +z k 的norm为: N(q) = |q| = x
Quaternion四元数与旋转
http://hi.baidu.com/xiongvb/blog/item/eec1b90293e5fd174bfb51f0.html http://cl314413.blog.163.com/blog/static/190507976201241914452590/
遇到的transform与Quaternion问题
想要实现的是:按住鼠标不放,无论角色朝哪儿,角色朝自己的前方蓄力,2秒后放出一道剑气,剑气往角色前方飞。 结果:这道剑气本身总是朝向正上方,飞行方向倒是能往角色前方飞。 搞了很久才大概明白,transform.up记录的是一个坐标方向,Quaternion记录的是角度,这2个是不同的。 蓄力的时候记录 fangxiang = transform.up; //我理解这是此时角色朝向 QuaCh
对于Quaternion的初步理解
Quaternion(四元数),在unity中用于角度的旋转。 Euler函数:返回一个旋转角度,绕z轴旋转z度,绕x轴旋转x度,绕y轴旋转y度(像这样的顺序)。 Quaternion.Euler(new Vector3(0,90,0))表示绕y轴旋转90度 Quaternion.Euler(new Vector3(90,90,90))表示绕xyz轴各旋转90度 1.我们让transf
Quaternion Screened Poisson Equation for Low-Light Image Enhancement——论文笔记
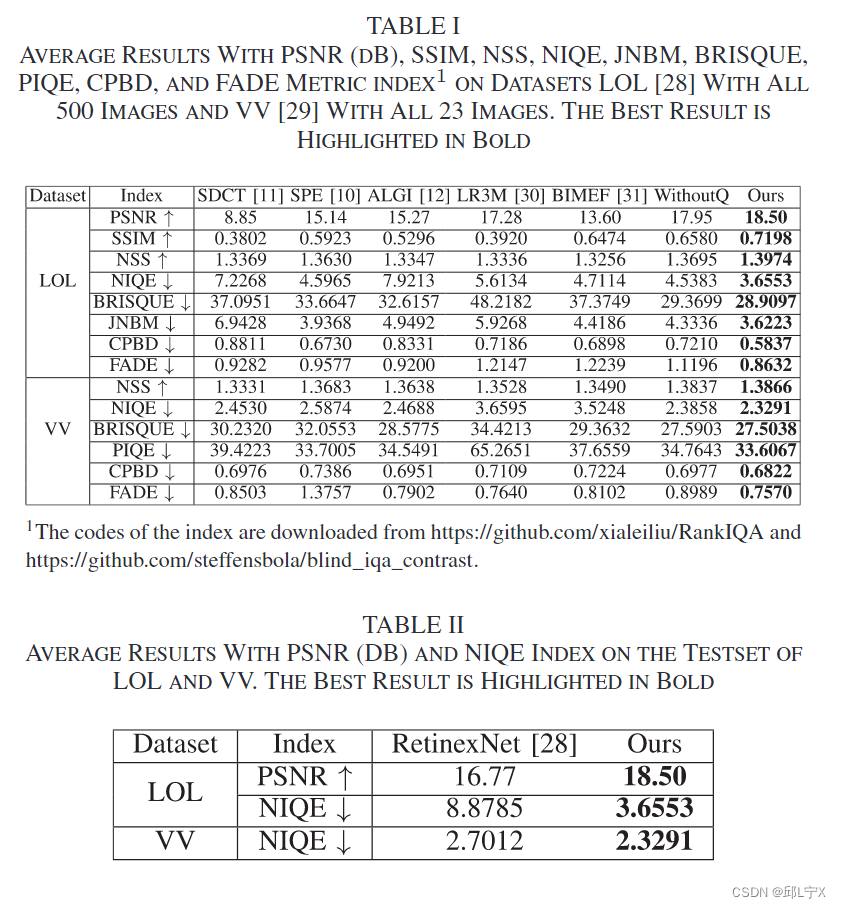
摘要: 图像增强是一种增强低照度图片照度的方法,它能在增强的同时保持图像的真实度和自然度。对于彩色图像,大多数方法采用分开处理不同彩色通道的方式,但这样会忽略掉不同彩色通道间的联系。因此,本文采用基于四元数(Quaternion)的模型去保留颜色相关性,它可以通过四元数将某一像素的颜色信息整合起来。此外,我们提出了基于伽马校正函数(Gamma-correction functio

四元数分析(Quaternion Analysis)在故障诊断中的应用
引言: 故障诊断是现代工业领域中非常重要的一个环节,它能够帮助工程师及时发现和解决设备故障,提高生产效率和产品质量。传统的故障诊断方法主要依赖于信号处理和统计学原理,但这些方法在处理复杂系统时存在一定的局限性。近年来,四元数分析作为一种新兴的数学工具,被广泛应用于故障诊断领域。本文将介绍四元数分析的基本概念和原理,并探讨其在故障诊断中的应用。 一、四元数分析的基本概念和原理 1.1 四元数的定义
MATLAB - 四元数(quaternion)
系列文章目录 前言 一、简介 四元数是一种四元超复数,用于三维旋转和定向。 四元数的表示形式为 a+bi+cj+dk,其中 a、b、c 和 d 为实数,i、j 和 k 为基元,满足等式:i2 = j2 = k2 = ijk =-1。 四元数集用 H 表示,定义在实数的四维向量空间 R4 中。H 中的每个元素都有一个基于基元素 i、j 和 k 线性组合的唯一表示。 三
unity3d 的Quaternion.identity和transform.rotation区别是什么
unity3d 的Quaternion.identity和transform.rotation区别是什么 Quaternion.identity就是指Quaternion(0,0,0,0),就是每旋转前的初始角度,是一个确切的值,而transform.rotation是指本物体的角度,值是不确定的,比如可以这么设置transform.rotation = Quaternion.identi
Quaternion.identity是什么意思?
Quaternion.identity是什么意思? Quaternion.identity就是指Quaternion(0,0,0,0), posted on 2017-04-12 16:27 jiahuafu 阅读(...) 评论(...) 编辑 收藏
VEX —— Quaternion|Euler Angle
目录 一,四元数相关概念 四元数 欧拉角 常用四元数相关函数 相互转换 二,案例 案例:沿面中心翻转 案例:路径导弹 一,四元数相关概念 四元数 在vex内四元数为((x,y,z),w); //VEX内获得四元数vector4 quaternion(matrix3 rotations) //仅应用矩阵的旋转信息vector4 quaternion
Unity中关于Quaternion和eulerAngles旋转的使用(万向锁)
一、前言 unity中提供了两种旋转方法欧拉角(eulerAngles)和四元数(Quaternio),为什么会出现两种旋转呢? 首先我们先了解欧拉角的旋转原理: 欧拉角是用于描述物体在三维空间中的旋转姿态的方法。也就是在三维世界中围绕x、y、z的旋转。但是欧拉角的旋转会形成万向锁。 欧拉旋转-教育-高清完整正版视频在线观看-优酷 (youku.com) 从视频中的万向节装置来看