本文主要是介绍Unity3D - 详解Quaternion类(一),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
转自:http://www.cnblogs.com/tgycoder/p/5103966.html
一、简介
Quaternion又称四元数,由x,y,z和w这四个分量组成,是由爱尔兰数学家威廉·卢云·哈密顿在1843年发现的数学概念。四元数的乘法不符合交换律。从明确地角度而言,四元数是复数的不可交换延伸。如把四元数的集合考虑成多维实数空间的话,四元数就代表着一个四维空间,相对于复数为二维空间。

四元数
关于四元数的性质、与旋转的关系、球型线性插值的介绍,请阅读3D游戏与计算机图形学中的数学方法-四元数,在此不多做介绍。下面主要介绍的是Unity中的四元数-Quaternion。
在Unity中,用Quaternion来存储和表示对象的旋转角度。Quaternion的变换比较复杂,对于GameObject一般的旋转及移动,可以用Transform中的相关方法实现。
二、Quaternion类属性
eulerAngles-欧拉角
定义
public Vector3 eulerAngles{get;set;}
如何改变一个游戏对象旋的转状态,我们可以通过改变其Transform进行欧拉角的变换次序,例如假设p(x,y,z)是游戏对象上的一个点,绕x轴旋转a角,绕y轴旋转b角,绕z轴旋转c角,这样就可以得到旋转之后的状态p'(x',y',z')。Unity的实现过程是很简单的,一句代码就可以搞定。但是具体的实现过程确实很复杂的,详情请阅读3D游戏与计算机图形学中的数学方法-变换。
下面给出一个例子,演示一下如何使用欧拉角。

using UnityEngine; using System.Collections;public class EulerAngler_ts : MonoBehaviour {public Transform A, B;Quaternion rotations = Quaternion.identity;Vector3 eulerAngle = Vector3.zero;float speed = 10.0f;float tSpeed = 0.0f;// Use this for initializationvoid Start () {}// Update is called once per framevoid Update () {tSpeed += speed * Time.deltaTime;//第一种方式:将Quaternion实例对象赋值给transform的rotationrotations.eulerAngles = new Vector3(0.0f, tSpeed, 0.0f);A.rotation = rotations;//第二种方式:将三位向量代表的欧拉角直接赋值给transform的eulerAngleB.eulerAngles = new Vector3(0.0f, tSpeed, 0.0f);} }
三、Quaternion类实例方法
1、SetFromToRotation方法-创建rotation实例
1.1 函数原型
public void SetFromToRotion(Vector3 fromDirection,Vector3 toDirection);
可以创建一个从formDirection到toDirection的Quaternion实例。
Quaternion q = Quaternion.identity;
q.SetFromToRotation(v1,v2);
transform.rotation = q;
可以将GameObject对象进行如下变换:首先将GameObject对象自身坐标系的x,y,z轴方向和世界坐标系的x,y,z轴方向一致,然后将GameObject对象自身坐标系中向量V1指向的方向旋转到V2方向。
1.2 PS:不可以直接使用transform.rotation.SetFromToRotation(v1,v2)方式进行设置,只能将实例化的Quaternion复制给transform.rotation。
1.3 实例演示
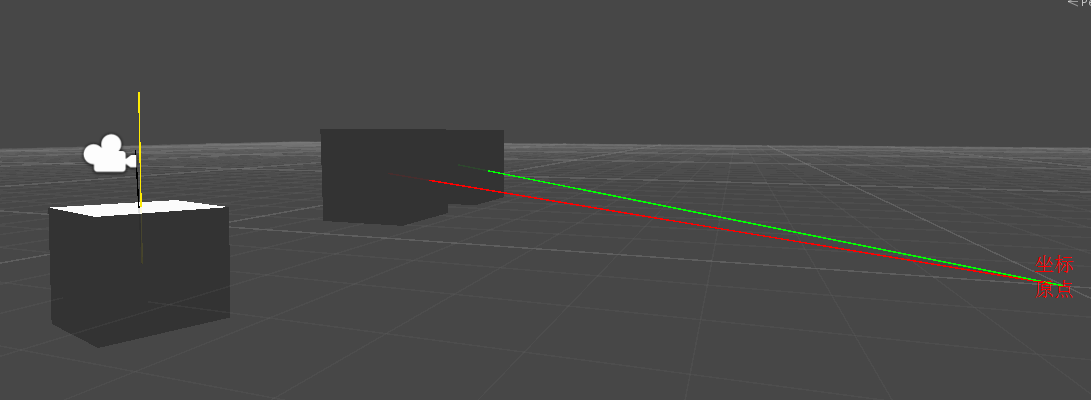
using UnityEngine; using System.Collections;public class SetFromToDirection_ts : MonoBehaviour {public Transform A, B, C;Quaternion q = Quaternion.identity;// Use this for initializationvoid Start () {}// Update is called once per framevoid Update () {q.SetFromToRotation(A.position, B.position);C.rotation = q;Debug.DrawLine(Vector3.zero, A.position, Color.red);Debug.DrawLine(Vector3.zero, B.position, Color.green);Debug.DrawLine(C.position, C.position + new Vector3(0.0f, 1.0f, 0.0f), Color.black);Debug.DrawLine(C.position, C.TransformPoint(Vector3.up * 1.5f), Color.yellow);} }
运行结果如下图所示:
2、SetLookRotation方法-设置Quaternion实例的朝向
2.1 函数原型
public void SetLookRotation(Vector3 view); public void SetLookRotation(Vector3 view,Vector3 up);
例如:
Quaternion q = Quaternion.identity;
q.SetLookRotation(v1,v2);
transform.rotation = q;
transform.forward方向与V1方向相同。
transform.right垂直于由Vector3.zer0、V1和V2这3点构成的平面。
V2决定了transform.up的朝向,因为当transform.forward和transform.right方向确定后,transform.up的方向总会与V2的方向的夹角小于或等于90度。
当V1为Vector3.zero时,方法失效。
2.2 PS:同上,不要直接使用transform.rotation.SetLookRotation(v1,v2)的方式来实例化Quaternion对象。
2.3 实例演示
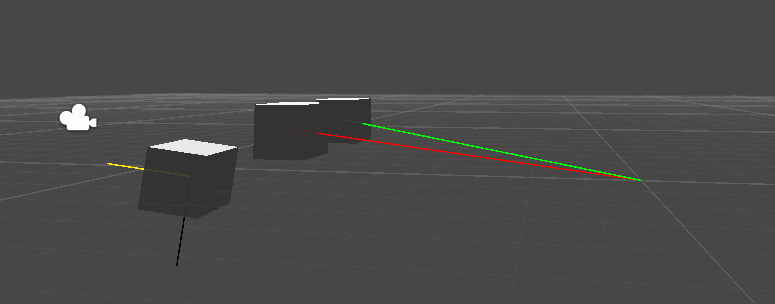
using UnityEngine; using System.Collections;public class SetLookRotation_ts : MonoBehaviour {public Transform A, B, C;Quaternion q = Quaternion.identity;// Use this for initializationvoid Start(){}// Update is called once per framevoid Update(){q.SetLookRotation(A.position, B.position);C.rotation = q;Debug.DrawLine(Vector3.zero, A.position, Color.red);Debug.DrawLine(Vector3.zero, B.position, Color.green);Debug.DrawLine(C.position, C.TransformPoint(Vector3.right * 1.5f), Color.black);Debug.DrawLine(C.position, C.TransformPoint(Vector3.forward * 1.5f), Color.yellow);Debug.Log("C.right与A的夹角: " + Vector3.Angle(C.right, A.position));Debug.Log("C.right与B的夹角: " + Vector3.Angle(C.right, B.position));Debug.Log("C.up与B的夹角: " + Vector3.Angle(C.up, B.position));} }
运行结果

3、ToAngleAxis方法
3.1 函数原型
public void ToAngleAxis(out float angle,out Vector3 axis);
参数angle为旋转角,参数axis为轴向量。
该函数可以实现将GameObject对象的rotation从Quaternion.identity状态变换到当前状态,只需要将GameObject对象绕着axis轴(世界坐标系)旋转angle角度即可。
3.2 实例演示
using UnityEngine; using System.Collections;public class ToAngleAxis_ts : MonoBehaviour {public Transform A, B;float angle;Vector3 axis = Vector3.zero;float xSpeed = 0.0f, ySpeed = 0.0f, zSpeed = 0.0f;// Use this for initializationvoid Start () {}// Update is called once per framevoid Update () {xSpeed += 0.5f * Time.deltaTime;ySpeed += 1.0f * Time.deltaTime;zSpeed += 2.5f * Time.deltaTime;A.eulerAngles = new Vector3(xSpeed, ySpeed, zSpeed);//获取A的rotation的旋转轴和角度A.rotation.ToAngleAxis(out angle, out axis);//设置B的rotation,使得B的rotation和A相同B.rotation = Quaternion.AngleAxis(angle, axis);} }
这篇关于Unity3D - 详解Quaternion类(一)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





