pursuit专题
轨迹跟踪与控制篇——Pure Pursuit纯跟踪算法
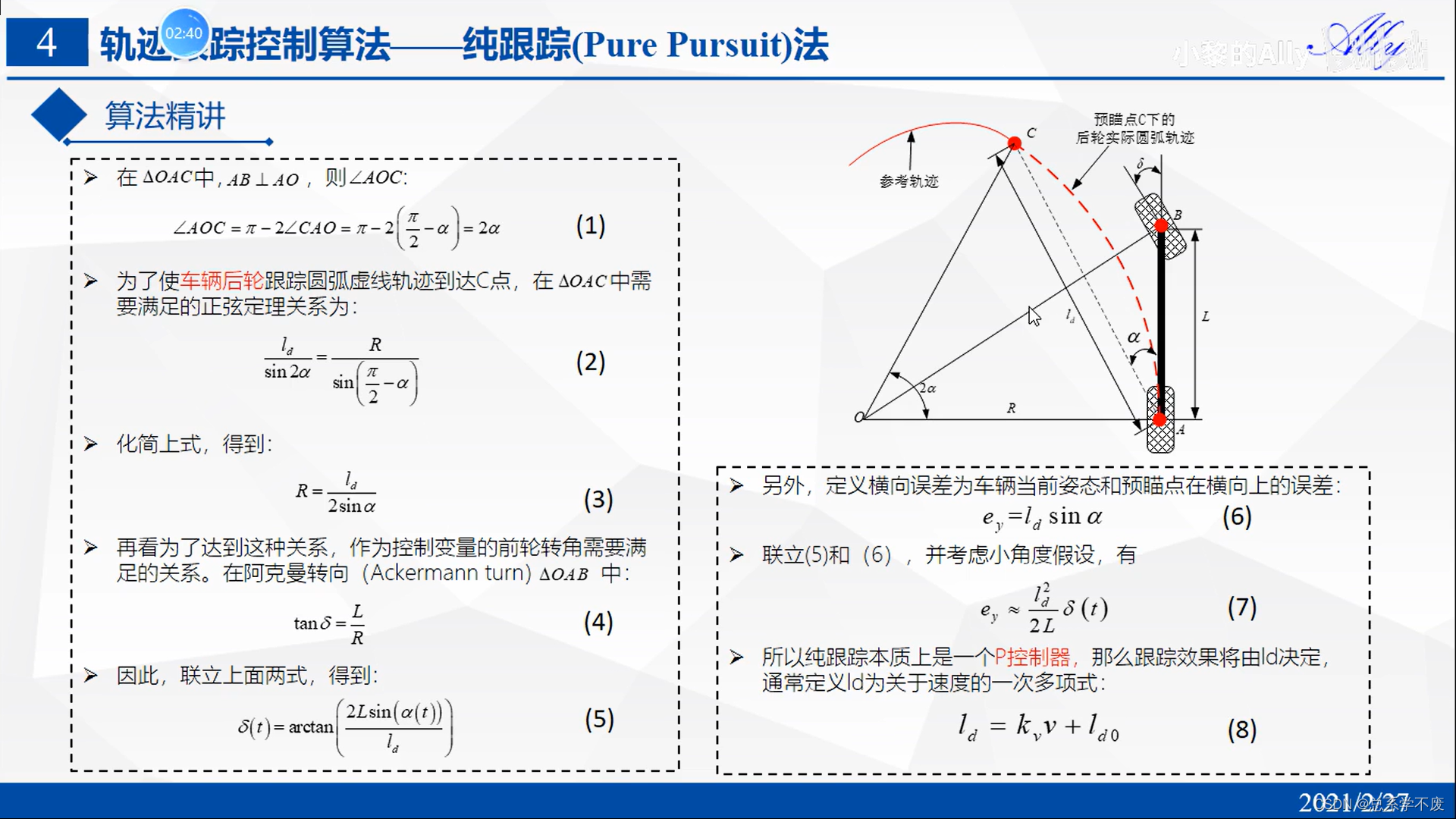
介绍 纯跟踪控制算法(Pure Pursuit)是一种典型的横向控制方法,最早由R.Wallace在1985年提出,该方法对参考轨迹的鲁棒性较好。 该算法的思想:基于当前车辆后轮中心位置,在参考路径上向 与 自车后轴中心距离ld(自定义)的位置处 匹配一个预瞄点,假设车辆后轮中心点可以按照一定的转弯半径R行驶抵达该预瞄点,然后根据预瞄距离ld,转弯半径R,车辆坐标系下预瞄点的朝向角2α之间的几何

正交匹配追踪(Orthogonal Matching Pursuit, OMP)的MATLAB实现
压缩感知(Compressed Sensing, CS)是一种利用稀疏信号的先验知识,用远少于奈奎斯特采样定理要求的样本数目恢复整个信号的技术。正交匹配追踪(Orthogonal Matching Pursuit, OMP)是一种常见的贪婪算法(Greedy algorithm),用于解决压缩感知中的信号重构问题。OMP算法试图找到一组稀疏基,这些基与测量值之间有最大的相关性,并且用于迭代地重构原
正交匹配追踪算法(Orthogonal Matching Pursuit)实现过程及Python模拟
正交匹配追踪(Orthogonal Matching Pursuit,OMP)是一种用于寻找稀疏信号的贪婪算法,用于求解压缩感知问题中的稀疏近似问题。在压缩感知的背景下,通常我们有一个欠定的线性系统Ax = y,其中A是一个已知的测量矩阵,y是观测到的信号,而x是未知的稀疏信号。OMP 试图找到一个稀疏信号x的解,使得Ax尽可能接近y。 定义 OMP算法的目标是解决下面的优化问题:在已知观测向
Pure Pursuit控制器路径跟随
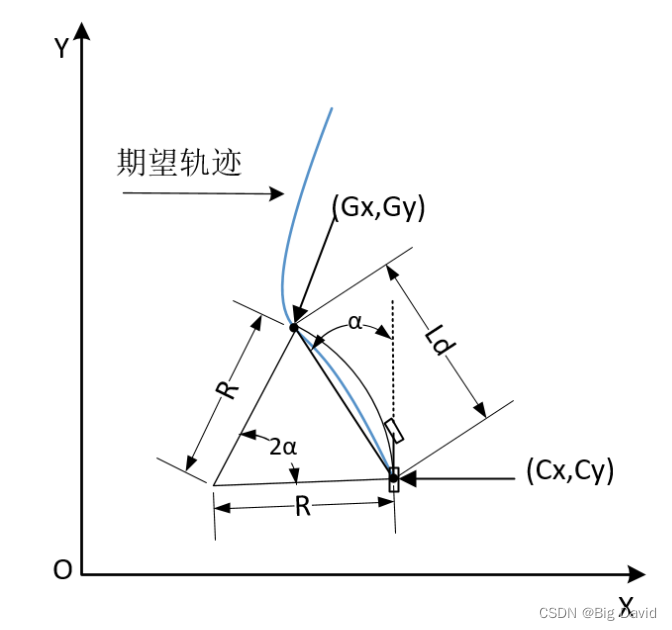
参考博客: Pure Pursuit 纯追踪法 Autoware(Pure pursuit代码学习) 1 Pure Pursuit纯追踪法 适用场景:低速场景(速度过高会产生转弯内切以及超调) 简化前轮转向角和后轴将遵循的曲率之间的关系 (Gx,Gy)是下一个需要追踪的路点,位于已经规划好的全局路径上,现在需要控制车辆的后轴经过该路点。 L d L_{d} Ld: 车辆后轴中心(Cx,C
单车模型下pure pursuit循迹
文章目录 1 pure pursuit方法2 实现例子 前置:单车模型及其线性化 1 pure pursuit方法 单车模型下的状态更新为,详细的变量含义在前置链接中 S ˙ = [ x ˙ y ˙ ψ ˙ ] = [ v c o s ( ψ ) v s i n ( ψ ) v t a n ( ψ ) L ] \dot S = \begin{bmatrix} \dot x

学习稀疏编码day3-Pursuit Algorithms – Guarantees
今天阅读了第四章的Pursuit Algorithms – Guarantees,因为今天一整天有课只阅读了第一节。以下是笔记推导过程。

学习稀疏编码day2-Pursuit Algorithms – Practice
本篇文章是我看《Sparse and Redundant Representations-From Theory to Applications in Signal and Image Processing》书的第三章Pursuit Algorithms – Practice的笔记,是如何求解X的一系列算法正交匹配追赶(OMP)算法,LS_OMP算法,MP算法,weak_MP算法和阈值算法,对公式

【论文复现】Furthering Datalog in the pursuit of program analysis
本文是对同名论文中GVN相关部分的代码进行复现,该论文的研读可以看笔者主页。 Souffle安装 Souffle是一个Datalog引擎,可以执行Datalog程序,支持将Datalog程序转换为C++程序。 在站内有该引擎的安装教程。但是其中的git链接已经失效,我将新的git链接贴在下面: git clone https://github.com/souffle-lang/souffle

压缩感知OMP(正交匹配追踪法 Orthogonal Matching Pursuit) 算法python实现
论文原文: % Signal Recovery From Random Measurements Via Orthogonal Matching % Pursuit,IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 53, NO. 12 实现代码: def cs_omp(y,Phi,N,K): residual=y #初始化残差index
《Pursuit of Happiness》之我见
《Pursuit of Happiness》之我见 近日重温了Will smith的《当幸福来敲门》,每次看都有新的意义,一直想记录点什么,可总是懒于下笔。适逢一朋友在博客里写了《当幸福来敲门》的观后感,这部片子其实更适合男人看,所以该mm看完后仍然有疑惑,仁者见仁,智者见智,我也借此发表下自己的感慨! 说明:分隔内标有序号的为鄙人之评论 之前有人推荐我看《当

用python实现Pure Pursuit控制算法
之前对Pure Pursuit控制算法作了介绍,并用Matlab进行了仿真,具体参考:https://blog.csdn.net/Ronnie_Hu/article/details/115817922?spm=1001.2014.3001.5501。 下面改用python对其进行仿真,同样跟踪一个圆形轨迹,具体代码如下: import numpy as npimport matplotlib

路径跟踪之Pure Pursuit控制算法
Pure Pursuit是一种几何跟踪控制算法,也被称为纯跟踪控制算法。该算法最早由R. Wallace在1985年提出,其思想是基于当前车辆的后轮中心位置(车辆质心),在参考路径上向(称为前视距离)的距离匹配一个预瞄点,假设车辆后轮中心可以按照一定的转弯半径𝑅行驶至该预瞄点,然后根据前视距离、转弯半径𝑅、车辆坐标系下预瞄点的朝向角𝛼之间的几何关系来计算前轮转角。 如上图所示,在三角形