本文主要是介绍轨迹跟踪与控制篇——Pure Pursuit纯跟踪算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
介绍
纯跟踪控制算法(Pure Pursuit)是一种典型的横向控制方法,最早由R.Wallace在1985年提出,该方法对参考轨迹的鲁棒性较好。
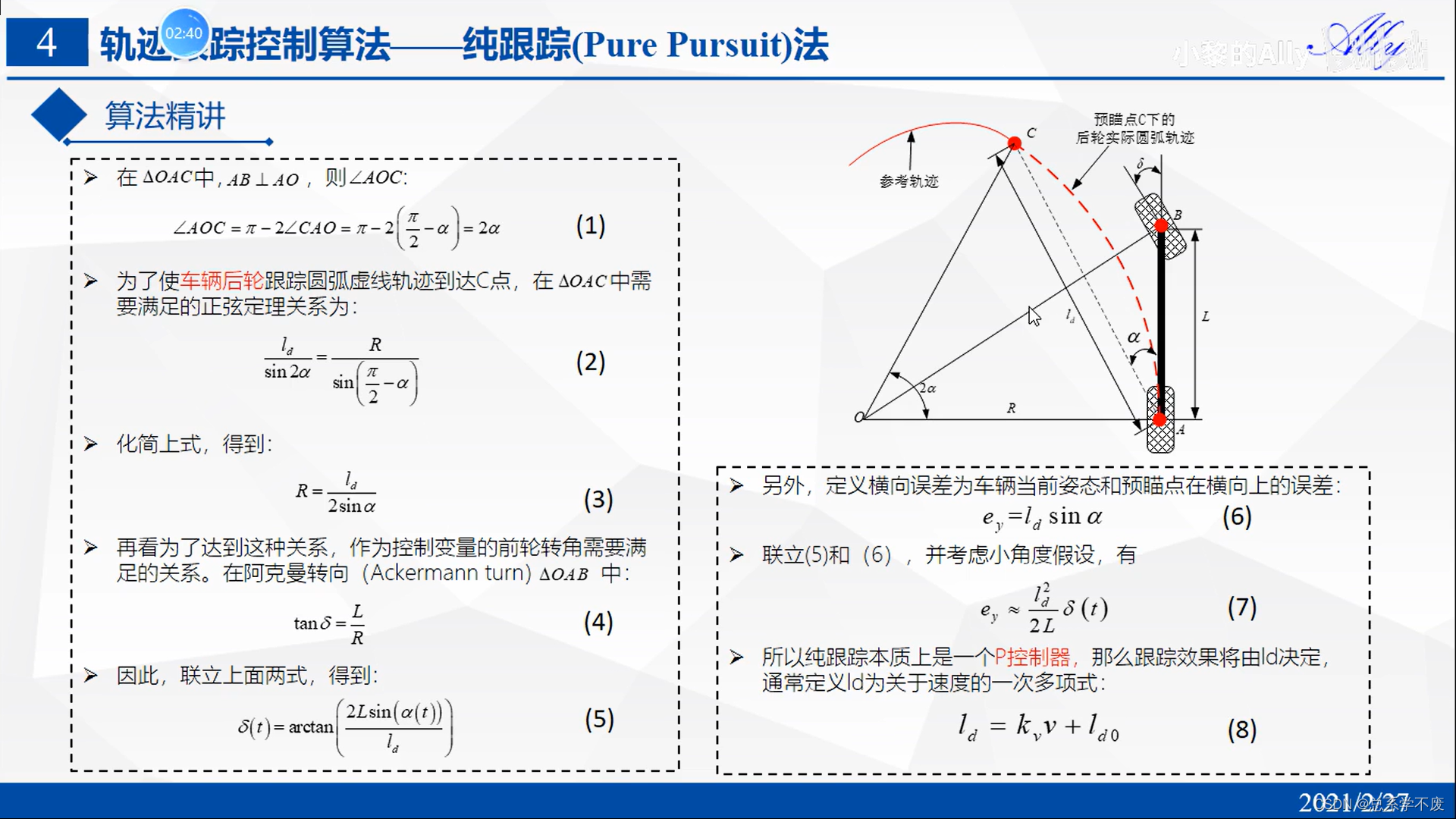
该算法的思想:基于当前车辆后轮中心位置,在参考路径上向 与 自车后轴中心距离ld(自定义)的位置处 匹配一个预瞄点,假设车辆后轮中心点可以按照一定的转弯半径R行驶抵达该预瞄点,然后根据预瞄距离ld,转弯半径R,车辆坐标系下预瞄点的朝向角2α之间的几何关系来确定前轮转角。
原理
参考资料
路径规划与轨迹跟踪系列算法学习_第10讲_纯跟踪法_哔哩哔哩_bilibili
这篇关于轨迹跟踪与控制篇——Pure Pursuit纯跟踪算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






