pitch专题

车辆姿态角(Euler角)Pitch、Yaw、Roll 的设定
首先申明:此坐标系是针对车辆而设定的,对于无人机来说是不同的。 pitch():俯仰角,pitchAngleC2W (orientation radian Y) yaw():航向角,yawAngleC2W (orientation radian Z) roll():横滚角,rollAngleC2W (orientation radian X)
【自动驾驶】17. pitch yaw roll是什么
本文链接:https://blog.csdn.net/yuzhongchun/article/details/22749521 三维空间的右手笛卡尔坐标如图1所示: 图1 在航空中,pitch, yaw, roll如图2所示: 图2 pitch是围绕X轴旋转,也叫做俯仰角,如图3所示: 图3:俯仰角pitch yaw是围绕Y轴旋转,也叫偏航角,如图

如何利用kaldi提自己想要的特征(mfcc plp pitch)
群里的@卡丁王一直想用kaldi提自己想要的特征,但是他老是出现错误。我自己试验下,下面是具体流程,希望你有所收获。 首先,确保你的s5文件夹有conf local step utils文件夹。然后你把你的数据保存为test文件夹,比如test文件夹里有test1.wav test2.wav test3.wav。 然后,新建个data文件夹,data文件夹新建个test文件夹,这个test

【语音识别】基于matlab语音分帧+端点检测+pitch提取+DTW算法歌曲识别【含Matlab源码 1057期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。 🍎个人主页:海神之光 🏆代码获取方式: 海神之光Matlab王者学习之路—代码获取方式 ⛳️座右铭:行百里者,半于九十。 更多Matlab仿真内容点击👇 Matlab图像处理(进阶版) 路径规划(Matlab) 神经网络预测与分类(Matlab) 优化求解(Matlab) 语音处理(Matlab
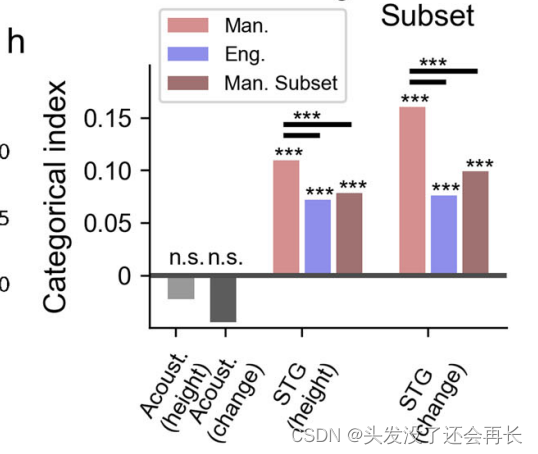
语音神经科学—05. Human cortical encoding of pitch in tonal and non-tonal languages
Human cortical encoding of pitch in tonal and non-tonal languages(在音调语音和非音调语言中人类大脑皮层的音高编码) 专业术语 tonal language 音调语言 pitch 音高 lexical tone 词汇音调 anatomical properties 解刨学特性 temporal lobe 颞叶 superior

亮眼 Pitch Deck 打造秘笈!2023 冬季波卡黑客松 Workshop 全回顾
如何才能更快地进入 Web3 开发世界?是技术专家的实战指导,还是行业大咖的前瞻分析,又或是自由平等的互动交流?在 OneBlock+ 与 Parity 联合举办的 2023 冬季波卡黑客松大赛中,这些想法都已悉数实现。 自 11 月 11 日至 12 月 2 日,贯穿 2023 冬季波卡黑客松大赛的 6 场赛前指导 Workshop&Office Hour 给所有热爱技术的开发者奉上了勇闯
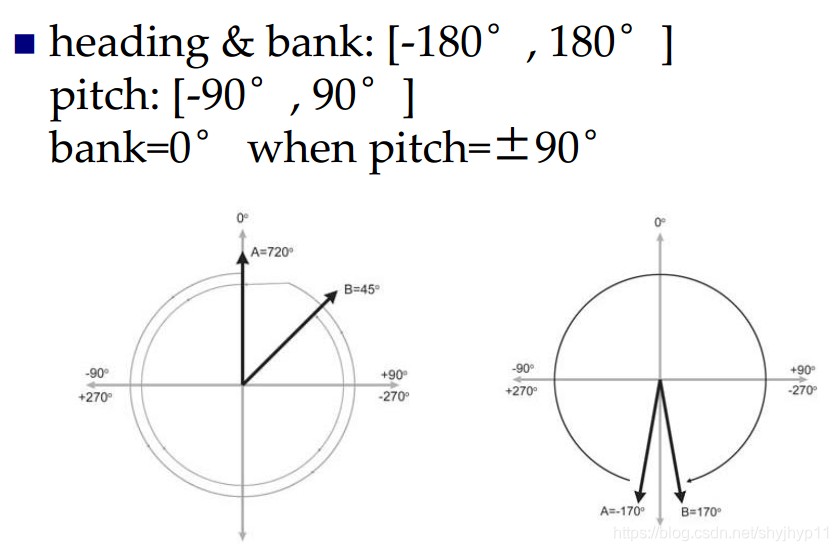
用欧拉角表示旋转(方位)heading pitch bank 含义,形象的图示
1. 简介 2. heading pitch bank 含义 heading: 物体绕自身的对象坐标系的Y轴,旋转的角度,下图中,对象坐标系与场景坐标系是重合的。 pitch: 物体绕自身的对象坐标系的X轴,旋转的角度,下图中,对象坐标系与场景坐标系未重合的。 bank: 物体绕自身的对象坐标系的Z轴,旋转的角度,下图中,对象坐标系与场景坐标系未重合的。 3.

D3DLOCKED_RECT::Pitch
某些纹理没有缓冲区,用纹理宽度*DWORD是可以得到正确的长度,但无论有没有缓冲区,Pitch总是存放每行的数据长度(已经乘过了DWORD),直接用行头指针(Char型,不可为DWORD)加上Pitch即可跳到下一行

051:mapboxGL改变bearing和pitch,变换查看视角
第051个 点击查看专栏目录 本示例是介绍演示如何在vue+mapbox中改变bearing和pitch,变换查看视角。bearing:地图的默认方位角(可选,表示 地图视口正上方中心点 在地图上 北偏东 的角度。默认值为 0)。pitch:地图的默认倾斜角度(可选,默认值为 0,范围为 0 ~ 85)。 直接复制下面的 vue+mapbox源代码,操作2分
「 机器人学 」“姿态角 roll、yaw、pitch”讲解
一、前言 载体坐标系与载体坐标系的关系是三个Euler角:yaw,pitch,roll,反应了载体相对基准面的姿态。 二、姿态角讲解 1. pitch是围绕X轴旋转,也叫做俯仰角。当X轴的正半轴位于过坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负,如下图所示: 2. yaw是围绕Y轴旋转,也叫偏航角。即机头右偏航为正,反之为负。