operating专题

Robot Operating System——加速度信息
大纲 应用场景1. 机器人运动控制场景描述具体应用 2. 传感器数据处理场景描述具体应用 3. 状态估计场景描述具体应用 4. 物体运动分析场景描述具体应用 5. 机器人仿真场景描述具体应用 定义字段解释 案例 geometry_msgs::msg::Accel 是 ROS 2 中的一个消息类型,用于表示加速度信息,包括线性加速度和角加速度。它通常用于机器人导航、控制和运动规划等场

ROS 2(Robot Operating System 2)示例项目代码
一个简单的ROS 2(Robot Operating System 2)示例项目代码,这个项目将包括两个节点:一个发布者(Publisher)节点和一个订阅者(Subscriber)节点。在这个例子中,发布者节点将周期性地发布一个字符串消息,而订阅者节点将接收这个消息并打印出来。 第一步:创建ROS 2工作空间 首先,你需要有一个ROS 2环境设置好。然后,你可以创建一个新的工作空间并初始化它
Robot Operating System——距离传感器数据
大纲 应用场景定义字段解释 案例 sensor_msgs::msg::Range 是 ROS (Robot Operating System) 中的一个消息类型,用于表示距离传感器(如超声波传感器、激光测距仪等)的测量数据。它包含了距离测量值以及传感器的相关信息。 应用场景 机器人导航 避障:在机器人导航中,距离传感器可以用于检测前方的障碍物。通过发布 Range 消息,机器

Robot Operating System——自定义Service/Client通信消息结构
大纲 初始化环境生成自定义服务的工程创建包自定义消息package.xml完整文件 CMakeLists.txt完整文件 编译注册 使用自定义服务的工程创建包代码CMakeLists.txt编译运行 工程地址参考资料 在《Robot Operating System——自定义订阅/发布的消息结构》一文中,我们讲解了如何自定义消息结构。这个消息是发布者向订阅者发送的消息,具有单向性。

Robot Operating System——多个自由度的关节状态信息
大纲 应用场景定义字段解释 案例 sensor_msgs::msg::MultiDOFJointState 是 ROS (Robot Operating System) 中的一个消息类型,用于表示具有多个自由度(Degrees of Freedom, DOF)的关节状态。它通常用于传输和处理机器人中复杂关节的状态信息。 应用场景 机器人控制 多自由度机械臂:在多自由度机械臂中

Robot Operating System——创建可执行文件项目的步骤
大纲 初始化环境创建Package代码添加依赖(package.xml)修改编译描述find_package寻找依赖库指定代码路径和编译类型(可执行文件/动态库)链接依赖的库完整文件 编译测试总结参考资料 之前我们看到ROS2中,有的Node的实现逻辑存在于动态库中,而动态库又有隐式加载和手动加载等几种模式。这些例子都比较复杂。本文将介绍如何从0到1创建一个最简单的工程,其Node

CS162 Operating System-lecture2
A tread is suspended or no longer executing when its state’s not loaded in registers the point states is pointed at some other thread .so the thread that’s suspended is actually siting in memory and
How to maintenance Operating System and Hardware Optimization
1.What Limits MySQL's Performance? CPU saturationI/O saturation 2.How to Select CPUs for MySQL? two goals for your server: Low latency(fast response time)High throughput 3.How to balancing Memory
Robot Operating System (ROS)中,发布与订阅
在Robot Operating System (ROS)中,发布与订阅是一种基于主题的异步消息传递机制,用于节点间的通信。ROS的设计是围绕着这一概念,它允许不同节点之间解耦,每个节点专注于自己的任务,通过发布和订阅消息来与其他节点交互。 ### 发布者 (Publisher) 发布者是向特定主题发送消息的节点。这些消息可以是传感器读数、控制指令、状态更新等。发布者不需要知道谁(如果有
![[论文笔记]AIOS: LLM Agent Operating System](https://img-blog.csdnimg.cn/img_convert/24e42f09787b649fcdd18b52f19a24f1.png)
[论文笔记]AIOS: LLM Agent Operating System
引言 这是一篇有意思的论文AIOS: LLM Agent Operating System,把LLM智能体(代理)看成是操作系统。 基于大语言模型(LLMs)的智能代理的集成和部署过程中存在着许多挑战,其中问题包括代理请求在LLM上的次优调度和资源分配,代理和LLM之间在交互过程中保持上下文的困难,以及集成具有不同能力和专业化的异构代理时固有的复杂性。代理数量和复杂性的迅速增加进一步加剧了这些
从软件设计角度下的操作系统发展轨迹——From the perspective of the software design of operating system course
操作系统首先是一个软件,它的设计脱离不了软件设计的范畴。从纯软件发展的角度对其进行考察,有助于我们了解操作系统的历史。下表给出了软件设计角度下的操作系统发展轨迹。 主流操作系统 系统特点 计算机语言 软件特点 背 景 无软件时期 无 手工操作 无编程语言,直接使用机器代码 手工操作 1936年图灵提出图灵机模型 系
从硬件角度看操作系统发展轨迹——From a hardware perspective operating system trajectory
操作系统理论是在计算机的应用中诞生并成长的,它的发展与计算机硬件的发展是密不可分的。下表是从硬件角度看操作系统的发展轨迹。 年 代 硬 件 特 点 操作系统特点 背 景 机械计算机时代(17世纪~20世纪初) ① 纯机械结构,低速 ② 只能进行简单的数学运算 纯手工操作 从计算尺到差分机再到分析机发展了数百年 第一代计算机(1946年
![[论文笔记]MemGPT: Towards LLMs as Operating Systems](https://img-blog.csdnimg.cn/img_convert/84605a0fb8d658bf3fa37cfa04eafd25.png)
[论文笔记]MemGPT: Towards LLMs as Operating Systems
引言 今天介绍一篇论文MemGPT: Towards LLMs as Operating Systems。翻过过来就是把LLM看成操作系统。 大语言模型已经在人工智能领域引起了革命性的变革,但受到有限上下文窗口的限制,在扩展对话和文档分析等任务中的效用受到了阻碍。为了能够利用超出有限上下文窗口的上下文,作者提出了虚拟上下文管理技术,这种技术受传统操作系统中层次化内存系统的启发,通过在物理内存和
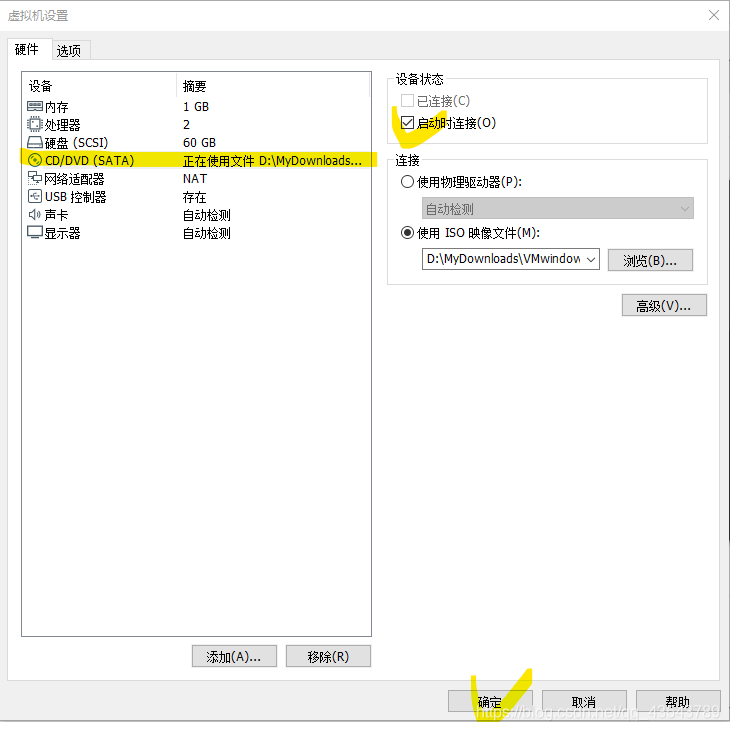
虚拟机启动Operating System not found找不到操作系统
错误信息 PEX-E51 No SHCP or proxyDHCP offers were received.PXE-M0F: Exiting Intel PXE ROM.Operating System not found 解决方法1 到服务里面检查跟vmware相关的服务是否已经全部启动 如果服务怎么都无法启动,最简单的办法还是重装vmware 解决方法
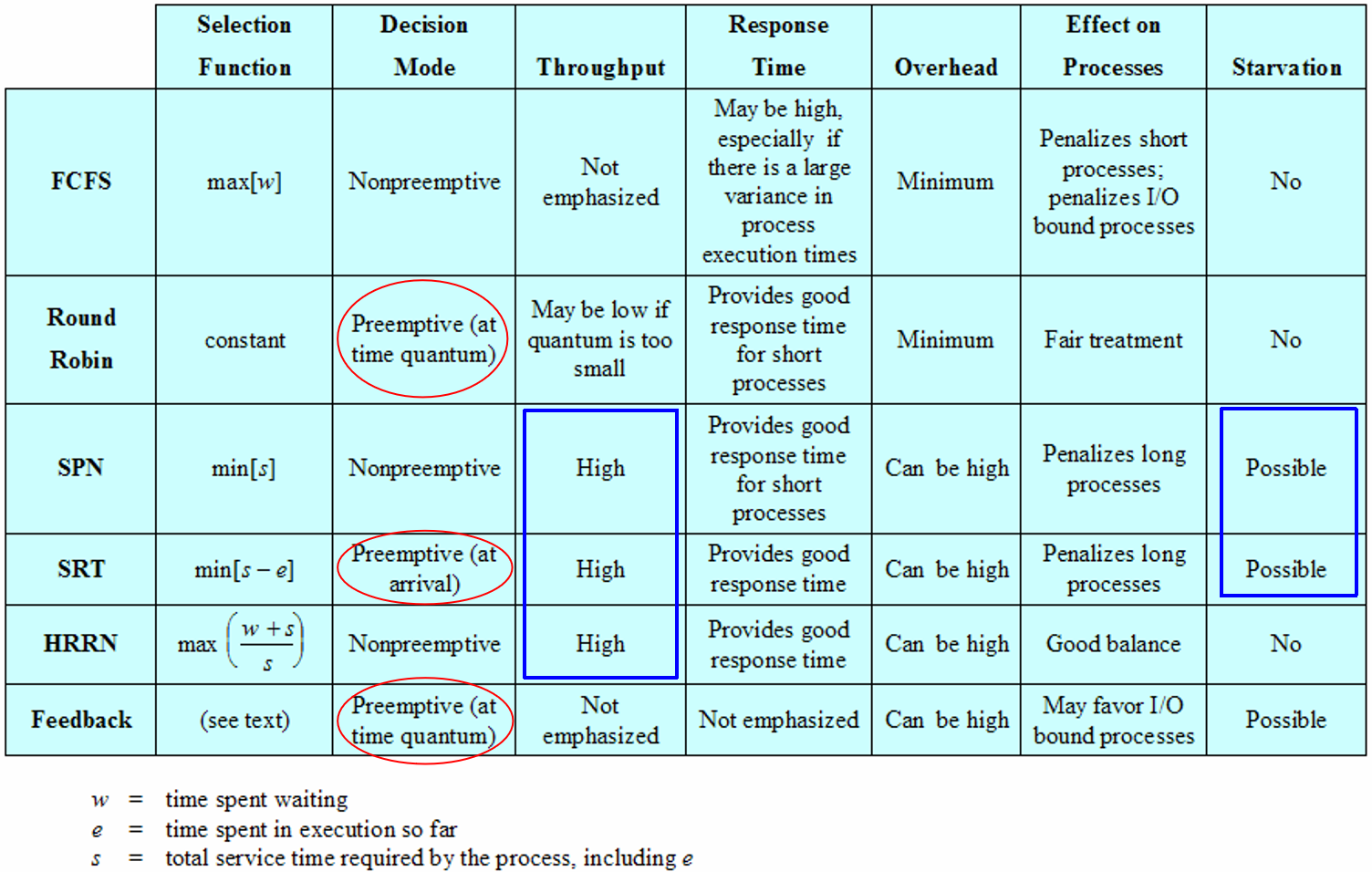
操作系统(Operating System)知识点复习——第九章 单处理器调度
目录 0.前言 1.调度的类型 2.调度算法Scheduling Algorithms 2.1 短程调度准则 ①User-oriented(面向用户) && Performance-related(性能相关) ②User-oriented(面向用户) && other ③System-oriented(面向系统) && Performance-related(性能相关) ④Sy
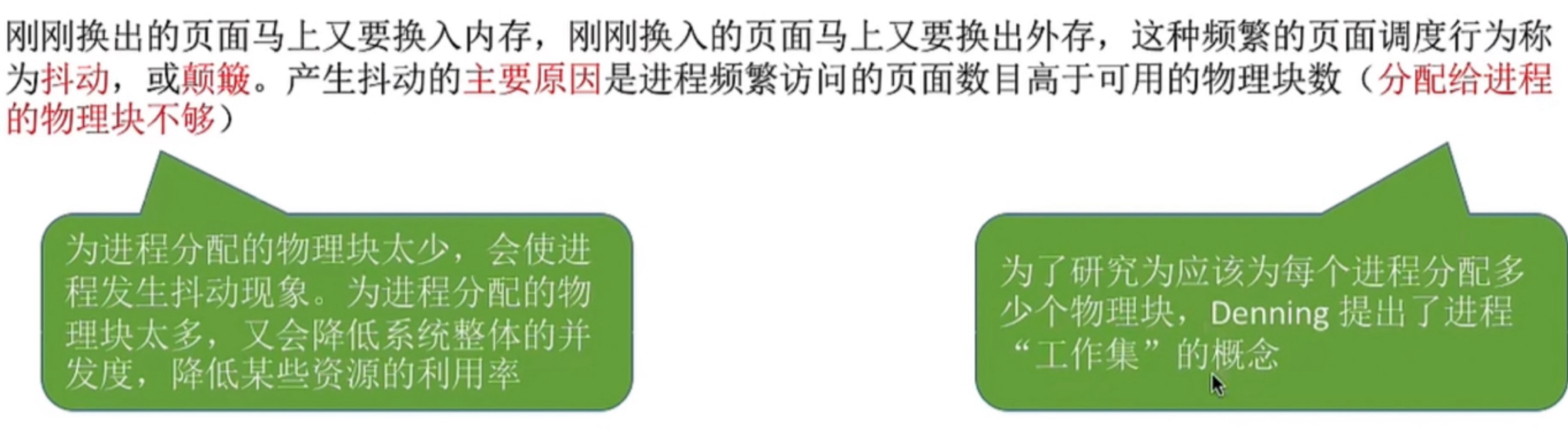
操作系统(Operating System)知识点复习——第八章 虚拟内存
目录 0.前言 1.硬件和控制结构 1.1 局部性原理Locality 1.2 分页Paging 1.2.1 多级页表Multi-level Paging System 1.2.2 反向页表/倒排页表Inverted Page Table 1.2.3 快表Translation Lookaside Buffer(TLB) 1.2.4 页尺寸 1.3 分段Segment 1.4
AIOS: LLM Agent Operating System
AIOS:LLM代理操作系统 摘要 文中提出了AIOS系统(人工智能操作系统),目的是解决在大型语言模型基础上部署智能代理时遇到的各种挑战,如调度不佳、资源分配不合理以及在代理与LLM交互过程中保持上下文的困难。AIOS旨在优化资源分配,实现代理间的上下文切换,支持代理的并行,并管理代理访问权限。 引言 介绍了自主代理的研究背景,以及大型语言模型如何使代理开发出现了新的可能性。文中讨论了当
Operating Systems Design and Implementation (3rd Edition)
版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章原始出版、作者信息和本声明。否则将追究法律责任。 http://blog.csdn.net/topmvp - topmvp Most books on operating systems deal with theory while ignoring practice. While the usual principles are
Analyzing Receiver Operating Characteristic Curves With SAS
版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章原始出版、作者信息和本声明。否则将追究法律责任。 http://blog.csdn.net/topmvp - topmvp As a diagnostic decision-making tool, receiver operating characteristic (ROC) curves provide a comprehe
CS162 Operating System笔记
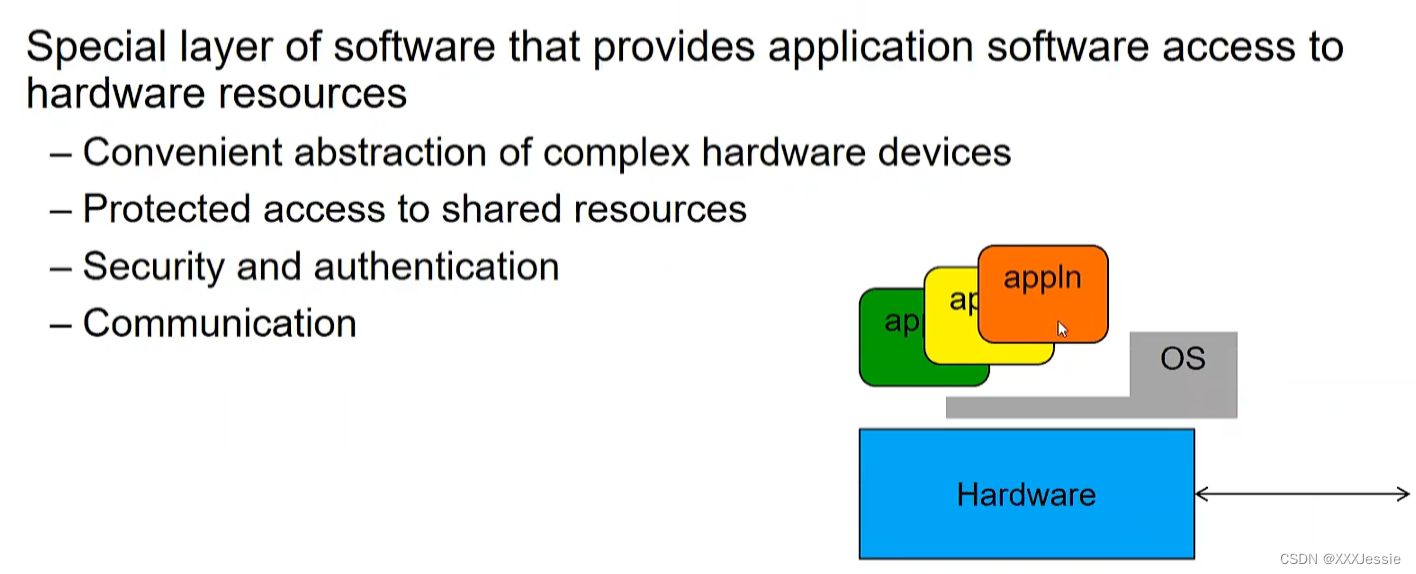
What is an Operating System? it’s typically a special layer of software that provides the application access to hardware resources.So.it’s convenient abs fractions of complex hardware devices.
operating system not found是由于分区没有激活引起的
operating system not found是由于分区没有激活引起的 解决operating system not found: 首先得保证你的安装盘里有一个“DOS工具集”这个选项,比如雨林木风就是‘运行 雨林木风 DOS工具集’。选择那个选项,进入工具集。 进入后是一个光标在那里闪烁等待输入命令,而且上面还会有命令提示,输入分区表管理命令:DISKGEN(不同的系统盘有可能不
docker 提示image operating system linux cannot be used on this platform
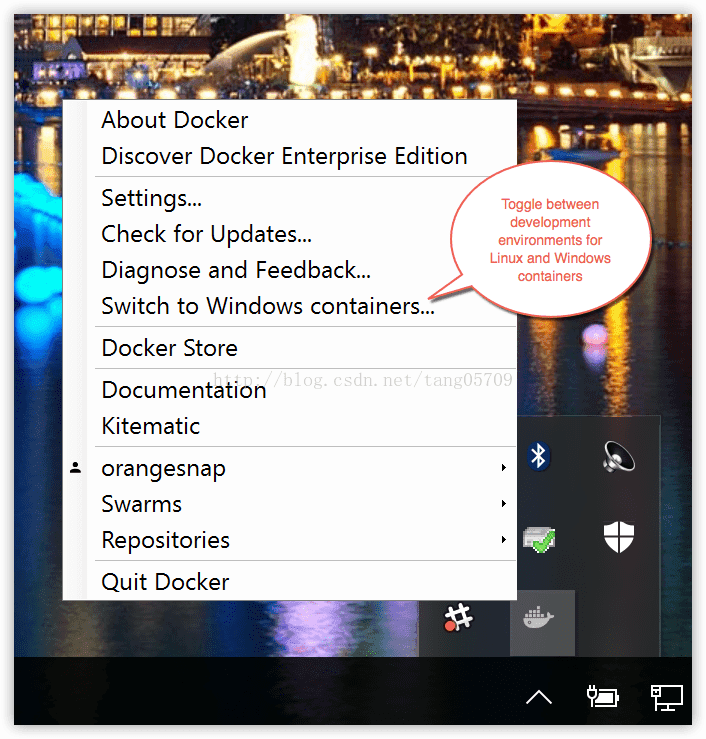
我使用的是docker for windows, 在docker run时提示image operating system "linux" cannot be used on this platform,docker可以选择使用的系统。 Switch between Windows and Linux containers You can select which daemon (Linux o

Robot Operating System 2: Design, Architecture, and Uses In The Wild
Robot Operating System 2: Design, Architecture, and Uses In The Wild (机器人操作系统 2:设计、架构和实际应用) 摘要:随着机器人在广泛的商业用例中的部署,机器人革命的下一章正在顺利进行。即使在无数的应用程序和环境中,也存在机器人共享的组件的通用词汇——需要模块化、可扩展且可靠的架构;传感;规划;流动性;
解决‘setuptools‘ is a dependency of conda and cannot be removed from conda‘s operating environment.
1. pip uninstall setuptools 2. conda update --force conda 成功

Distributed Systems Concepts and Design:Operating Systems Support操作系统支持
操作系统支持在分布式系统中起着至关重要的作用。它们为应用程序提供了一个抽象层,隐藏了硬件细节,并确保了可靠、高效的资源管理和调度。在分布式系统中,操作系统必须处理节点间的通信和同步问题,以便在分布式应用程序中实现有效的资源共享和负载均衡。此外,操作系统还需要支持分布式应用程序的并发执行,提供必要的并发控制机制。 分布式系统中的操作系统通常需要在节点间进行协调,以确保系统资源的公平分配和高效利用。为

系统重装失败开机出现an operating system黑屏怎么办
如果电脑出现an operating system黑屏,那直观的意思就是电脑找不到操作系统了。那么当系统重装失败开机出现an operating system黑屏怎么办?这种一般可能是系统坏了或者是您的电脑启动项没有设置正确,也有可能是电脑检测不到硬盘造成的。下面小编就教下大家系统重装失败出现an operating system黑屏的解决方法。 具体的解决方法如下: 1、先检查下电脑的启动项