nuscenes专题

【3D目标检测】MMdetection3d——nuScenes数据集训练BEVFusion
引言 MMdetection3d:【3D目标检测】环境搭建(OpenPCDet、MMdetection3d) MMdetection3d源码地址:https://github.com/open-mmlab/mmdetection3d/tree/main?tab=readme-ov-file IS-Fusion源码地址:https://github.com/yinjunbo/IS-Fusion

nuscenes 数据集学习笔记
目录 数据信息类型: 数据信息类型: Map & Camera(png), Lidar(激光雷达) & Radar(雷达)(pcd), Json 文件结构(以v1.0-mini为例): maps: 存放Map的png文件samples: 存放Camera, Lidar, Radar关键非结构化数据信息, 带标注sweeps: 存放Camera, Lidar, Radar 次要非结构

streampetr原版网络nuscenes数据pkl文件中的各字段含义
streampetr原版网络nuscenes数据pkl文件中的各字段含义 每帧数据都包含下列的信息 "token": 该帧数据的标识,具有唯一性"prev": 该帧数据上一帧数据的token,如果没有就为"""next": 该帧数据下一帧数据的token,如果没有就为"""frame_idx" : 记录该帧数据是所在的序列内的第几帧,用于判断该帧数据是否为序列的首帧"

BevFusion (2): nuScenes 数据介绍及点云可视化
1. nuScenes 数据集 1.1 概述 nuScenes 数据集 (pronounced /nu:ːsiː:nz/) 是由 Motional (以前称为 nuTonomy) 团队开发的自动驾驶公共大型数据集。nuScenes 数据集的灵感来自于开创性的 KITTI 数据集。 nuScenes 是第一个提供自动驾驶车辆整个传感器套件 (6 个摄像头、1 个 LIDAR、5 个 RADAR、
Nuscenes数据集点云数据如何转换到图像上
零、概要 注意:该文章是手写ai自动驾驶,Nuscenes数据集的笔记。 首先,学习需要使用到 nuScenes 数据集。python 工具需要使用到 nuscenes-devkit、pyquaternion from nuscenes.nuscenes import NuScenesfrom pyquaternion import Quaternion # 四元数操作的包 https
【nuScenes SOTA】EA-LSS:Edge-aware Lift-splat-shot Framework for 3D BEV Object Detection个人解析
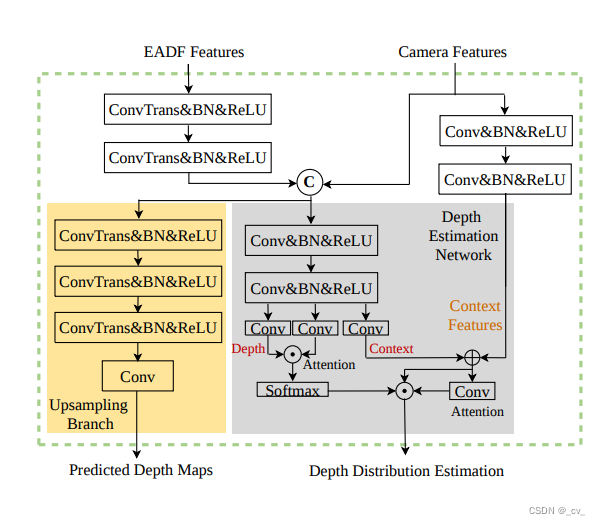
文章目录 重点Fine-grained Depth ModuleEdge-aware Depth Fusion Module 重点 这篇文章最主要就是提出来两个模块,如上图所示,一个是FGD Module(Fine-grained Depth Module),另一个是EADF Module(Edge-aware Depth Fusion Module) Fine-g
NuScenes Dataset的坐标系及OpenPCDet里针对NuScenes Dataset格式的输入输出数据的坐标系转换
网上很多文章只提了NuScenes坐标系有哪些,但是没有找到一篇文章把NuScenes坐标系的转换结合代码说全说明白了,结合工作需要,针对OpenPCDet里读取NuScenes数据集对数据做坐标转换的代码说一下。 OpenPCDet是3D点云目标检测框架,顾名思义,模型的输入数据都是点云数据!只有在近来OpenPCDet把多模态融合模型BEVFusion加入进来后才考虑了图像和点云两种输入数据
【论文解读】NuScenes-QA:自动驾驶场景的多模态视觉问答基准
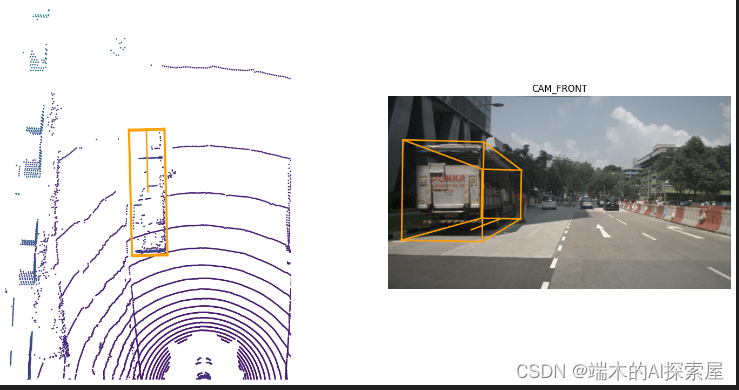
来源:投稿 作者:橡皮 编辑:学姐 论文链接:https://arxiv.org/pdf/2305.14836.pdf 开源代码:https://github.com/qiantianwen/NuScenes-QA 摘要: 我们在自动驾驶背景下引入了一种新颖的视觉问答(VQA)任务,旨在根据街景线索回答自然语言问题。与传统的VQA任务相比,自动驾驶场景中的VQA提出了更多的
19:nuScenes: A multimodal dataset for autonomous driving
1.介绍 目标的鲁棒检测与跟踪是自动驾驶汽车技术发展的关键。基于图像的基准数据集推动了计算机视觉任务的发展,如目标检测、跟踪和环境中代理的分割。然而,大多数自动驾驶汽车都配有摄像头和测距传感器,如激光雷达和雷达。随着基于机器学习的检测和跟踪方法变得越来越流行,有必要在包含距离传感器数据和图像的数据集上训练和评估这些方法。在这项工作中,我们展示了nuTonomy场景(nuScenes),这是

对Nuscenes数据集一无所知,手把手带你玩转Nuscenes数据集
文章目录 Nuscenes数据集简介准备工作✨✨✨数据读取✨✨✨安装库导入相关模块和数据集场景scene⭐⭐⭐样本sample⭐⭐⭐样本数据 sample_data⭐⭐⭐样本标注 sample_annotation⭐⭐⭐实例 instance类别categories属性attributes⭐⭐⭐可视化 visibility传感器 sensor校准传感器 calibrated_sensor车辆

手把手带你玩转Nuscenes数据集2——nuScenes lidarseg and panoptic教程
文章目录 准备工作✨✨✨数据读取✨✨✨导入相关库并加载数据集lidarseg和panoptic数据集的点统计panoptic数据集的instance统计获取lidarseg和panoptic的sample token的统计信息⭐⭐⭐渲染lidarseg标签⭐⭐⭐渲染panoptic标签⭐⭐⭐在图像中渲染lidarseg和panoptic 标签⭐⭐⭐渲染sample(例如lidar、radar

nuscenes教程
本篇文章适用于对python、ubuntu以及一些操作不太懂的小白,大神以及精通的请跳过,本篇文章参考nuscenes官网而写(最好有点python基础,不然学起来很痛苦,本人纯小白,走了很多弯路)。本操作环境在ubuntu20.04,python3.7环境下完成(需要有python3.7、conda的环境) 一、nuscenes数据集介绍: 1.nuScenes数据集(发音为/nuːsiːnz
使用shell脚本下载Nuscenes数据集
数据集官方地址https://www.nuscenes.org/download 一、 创建shell脚本 首先创建一个新目录,用来存放.sh文件 mkdir scripts 在这目录中使用cat命令进行创建和编辑dataset.sh文件,可以根据自己需求来进行命名 cd scriptscat > dataset.sh 二、 编辑shell文件 cat命令输入之后会直接进入到文