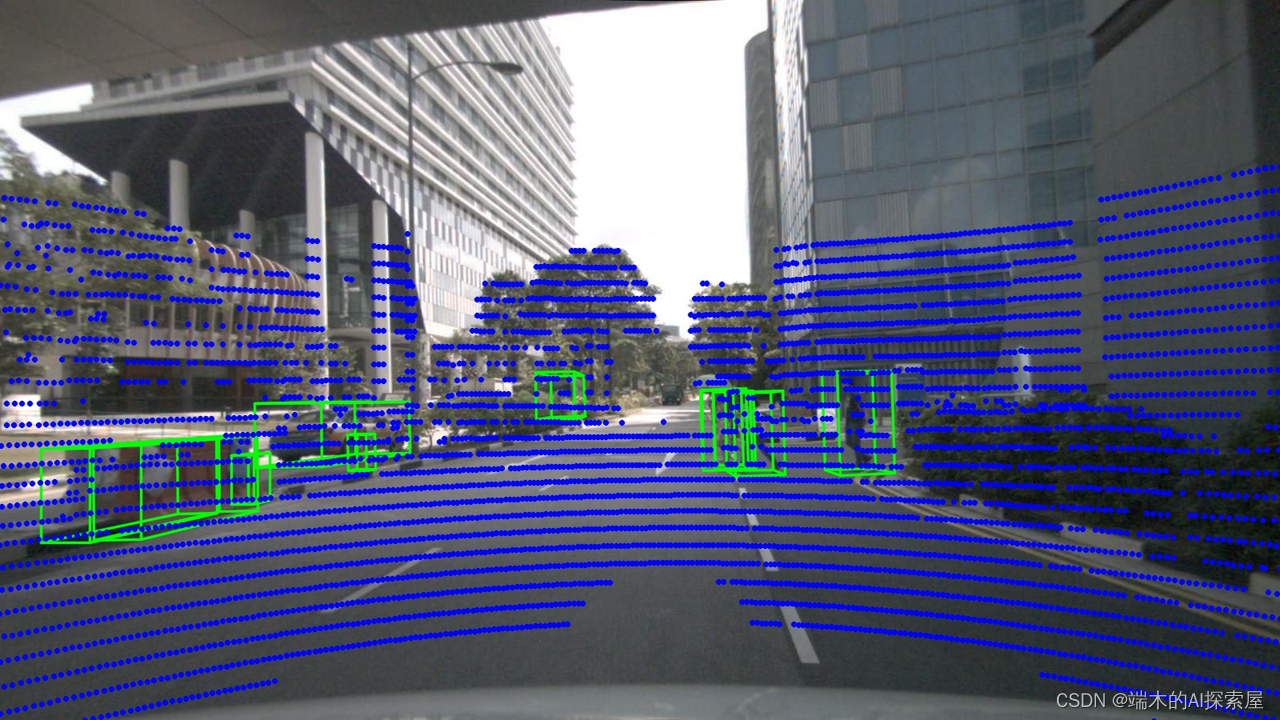
本文主要是介绍Nuscenes数据集点云数据如何转换到图像上,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
零、概要
注意:该文章是手写ai自动驾驶,Nuscenes数据集的笔记。
- 首先,学习需要使用到 nuScenes 数据集。python 工具需要使用到 nuscenes-devkit、pyquaternion
from nuscenes.nuscenes import NuScenes
from pyquaternion import Quaternion # 四元数操作的包
https://github.com/nutonomy/nuscenes-devkit/tree/master
-
官网https://github.com/nutonomy/nuscenes-devkit/blob/master/python-sdk/tutorials/nuscenes_tutorial.ipynb可以看非常好
-
https://www.nuscenes.org/nuscenes#explore该网址能够可视化了解nuscenes数据集。
一、提出疑问
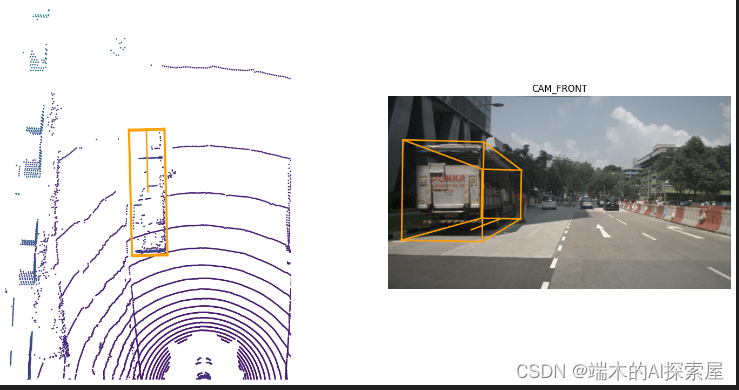
- 如何将Lidar的点与图片对应,画出
二、代码大体了解
# pip install nuscenes-devkit # tingfeng1 需要包 nuscenes-devkit
from nuscenes.nuscenes import NuScenes
from nuscenes.utils.data_classes import Box
from pyquaternion import Quaternion
import numpy as np
import cv2
import osnp.set_printoptions(precision=3, suppress=True)version = "mini"
dataroot = "/data/mini"
nuscenes = NuScenes(version='v1.0-{}'.format(version), dataroot=dataroot, verbose=False) # tingfeng2 实例化类NuScenescameras = ['CAM_FRONT_LEFT', 'CAM_FRONT', 'CAM_FRONT_RIGHT', 'CAM_BACK_LEFT', 'CAM_BACK', 'CAM_BACK_RIGHT']
sample = nuscenes.sample[0] # tingfeng3获取第一个样本def to_matrix4x4_2(rotation, translation, inverse=True):output = np.eye(4)output[:3, :3] = rotationoutput[:3, 3] = translationif inverse:output = np.linalg.inv(output)return outputdef to_matrix4x4(m):output = np.eye(4)output[:3, :3] = mreturn output# tingfeng4 拿到样本后,获取Lidar的信息
# Lidar的点云是基于Lidar坐标系的
# 需要将lidar的坐标转换到ego,然后ego到global
lidar_sample_data = nuscenes.get('sample_data', sample['data']["LIDAR_TOP"])
lidar_file = os.path.join(nuscenes.dataroot, lidar_sample_data["filename"])
lidar_pointcloud = np.fromfile(lidar_file, dtype=np.float32).reshape(-1, 5)
ego_pose = nuscenes.get('ego_pose', lidar_sample_data['ego_pose_token'])
ego_to_global = to_matrix4x4_2(Quaternion(ego_pose['rotation']).rotation_matrix, np.array(ego_pose['translation']), False)
lidar_sensor = nuscenes.get('calibrated_sensor', lidar_sample_data['calibrated_sensor_token'])
lidar_to_ego = to_matrix4x4_2(Quaternion(lidar_sensor['rotation']).rotation_matrix, np.array(lidar_sensor['translation']), False)
lidar_to_global = ego_to_global @ lidar_to_ego
lidar_points = np.concatenate([lidar_pointcloud[:, :3], np.ones((len(lidar_pointcloud), 1))], axis=1)
lidar_points = lidar_points @ lidar_to_global.T # tingfeng5 点云转到global坐标系# tingfeng6 获取每一个camera的信息
# 1. annotation标注是global坐标系的
# 2. 由于时间戳的缘故,每个camera/lidar/radar都有ego_pose用于修正差异
for camera in cameras:camera_sample_data = nuscenes.get('sample_data', sample['data'][camera])image_file = os.path.join(nuscenes.dataroot, camera_sample_data["filename"])ego_pose = nuscenes.get('ego_pose', camera_sample_data['ego_pose_token'])global_to_ego = to_matrix4x4_2(Quaternion(ego_pose['rotation']).rotation_matrix, np.array(ego_pose['translation']))camera_sensor = nuscenes.get('calibrated_sensor', camera_sample_data['calibrated_sensor_token']) camera_intrinsic = to_matrix4x4(camera_sensor['camera_intrinsic'])ego_to_camera = to_matrix4x4_2(Quaternion(camera_sensor['rotation']).rotation_matrix, np.array(camera_sensor['translation']))global_to_image = camera_intrinsic @ ego_to_camera @ global_to_ego # tingfeng7 根据相机中得到的信息得到的三个矩阵,将global坐标系的坐标转换到image上image = cv2.imread(image_file) for annotation_token in sample['anns']: # tingfeng8 标注的框的信息,在sample['anns']中,遍历标注框instance = nuscenes.get('sample_annotation', annotation_token)box = Box(instance['translation'], instance['size'], Quaternion(instance['rotation']))corners = np.ones((4, 8))corners[:3, :] = box.corners() corners = (global_to_image @ corners)[:3] # tingfeng11 注意角点是global坐标,这里转换到image上corners[:2] /= corners[[2]]corners = corners.T.astype(int) # tingfeng9 到此是计算框的角点ix, iy = [0, 1, 2, 3, 0, 1, 2, 3, 4, 5, 6, 7], [4, 5, 6, 7, 1, 2, 3, 0, 5, 6, 7, 4]for p0, p1 in zip(corners[ix], corners[iy]):if p0[2] <= 0 or p1[2] <= 0: continuecv2.line(image, (p0[0], p0[1]), (p1[0], p1[1]), (0, 255, 0), 2, 16) # tingfeng10 到此是把角点划到image上image_based_points = lidar_points @ global_to_image.T # tingfeng12 雷达的信息也投射到image上image_based_points[:, :2] /= image_based_points[:, [2]]show_points = image_based_points[image_based_points[:, 2] > 0][:, :2].astype(np.int32)for x, y in show_points:cv2.circle(image, (x, y), 3, (255, 0, 0), -1, 16) # # tingfeng13 lidar的信息画到image上cv2.imwrite(f"{camera}.jpg", image)
三、手写
3.1 了解 NuScenes 的实例对象
-
了解如何实例化,参数需要什么
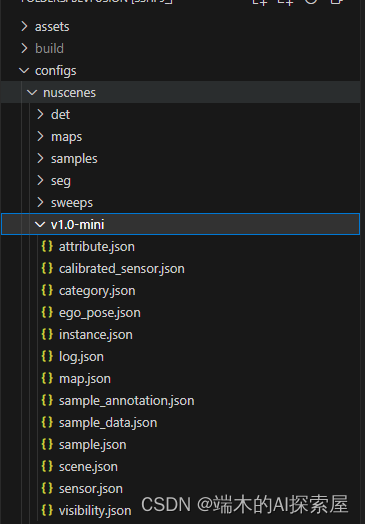
- 第一个参数 version。目前理解是给 nuscenes 下载下来。那个有一堆 json 文件的文件夹名字。
- 通常是
v1.0-{mini, test, trainval}
- 通常是
- 第二个参数是数据集根目录。图片上是 nuscenes
- 第一个参数 version。目前理解是给 nuscenes 下载下来。那个有一堆 json 文件的文件夹名字。
-
了解如何获取数据,数据是什么样
- 如下实例化后。就能简单查看里面的数据了。
from nuscenes.nuscenes import NuScenes
import numpy as np
import cv2
import os# 1. 实例化NuScenes
version = "v1.0-mini" # 因为我们是用的是mini数据集
dataroot = "/home/shenlan09/tingfeng/BEVFusion/BEVfusion/bevfusion/configs/nuscenes"
# 我的数据集放这里了,我用的绝对路径
nuscenes = NuScenes(version=version, dataroot=dataroot, verbose=False)
# print(len(nuscenes.sample)) # 404sample = nuscenes.sample[0] # 读取sample中第一个数据,具体了解
print(nuscenes)
- 另外。官方教程上,拿到第一个 sample 可以用
%matplotlib inline
from nuscenes.nuscenes import NuScenes
nusc = NuScenes(version='v1.0-mini', dataroot="/home/shenlan09/tingfeng/BEVFusion/BEVfusion/bevfusion/configs/nuscenes", verbose=True)
'''
Loading NuScenes tables for version v1.0-mini...
23 category,
8 attribute,
4 visibility,
911 instance,
12 sensor,
120 calibrated_sensor,
31206 ego_pose,
8 log,
10 scene,
404 sample,
31206 sample_data,
18538 sample_annotation,
4 map,
Done loading in 0.5 seconds.
============================Reverse indexing ...
Done reverse indexing in 0.1 seconds.
====================================='''
nusc.list_scenes()'''
scene-0061, Parked truck, construction, intersectio... [18-07-24 03:28:47] 19s, singapore-onenorth, #anns:4622
scene-0103, Many peds right, wait for turning car, ... [18-08-01 19:26:43] 19s, boston-seaport, #anns:2046
scene-0655, Parking lot, parked cars, jaywalker, be... [18-08-27 15:51:32] 20s, boston-seaport, #anns:2332
scene-0553, Wait at intersection, bicycle, large tr... [18-08-28 20:48:16] 20s, boston-seaport, #anns:1950
scene-0757, Arrive at busy intersection, bus, wait ... [18-08-30 19:25:08] 20s, boston-seaport, #anns:592
scene-0796, Scooter, peds on sidewalk, bus, cars, t... [18-10-02 02:52:24] 20s, singapore-queensto, #anns:708
scene-0916, Parking lot, bicycle rack, parked bicyc... [18-10-08 07:37:13] 20s, singapore-queensto, #anns:2387
scene-1077, Night, big street, bus stop, high speed... [18-11-21 11:39:27] 20s, singapore-hollandv, #anns:890
scene-1094, Night, after rain, many peds, PMD, ped ... [18-11-21 11:47:27] 19s, singapore-hollandv, #anns:1762
scene-1100, Night, peds in sidewalk, peds cross cro... [18-11-21 11:49:47] 19s, singapore-hollandv, #anns:935
'''
my_scene = nusc.scene[0]
'''
{'token': 'cc8c0bf57f984915a77078b10eb33198',
'log_token': '7e25a2c8ea1f41c5b0da1e69ecfa71a2',
'nbr_samples': 39,
'first_sample_token': 'ca9a282c9e77460f8360f564131a8af5',
'last_sample_token': 'ed5fc18c31904f96a8f0dbb99ff069c0',
'name': 'scene-0061',
'description': 'Parked truck, construction, intersection, turn left, following a van'}
'''first_sample_token = my_scene['first_sample_token']# The rendering command below is commented out because it tends to crash in notebooksnusc.render_sample(first_sample_token) # 能够在 ipynb 文件中渲染3.1.1 数据格式
- (nuscenes.sample[0]的打印输出信息)nuscenes.sample[0]是指第一个样本。是某时刻的所有数据
- 包含多个相机数据token、Lidar数据对应的token。anns是3D标注边框的token
{'token': 'ca9a282c9e77460f8360f564131a8af5',
'timestamp': 1532402927647951,
'prev': '',
'next': '39586f9d59004284a7114a68825e8eec',
'scene_token': 'cc8c0bf57f984915a77078b10eb33198',
'data!!传感器信息!!': {'RADAR_FRONT': '==每个里面的字符串叫token,根据这个就能找到位置的信息==37091c75b9704e0daa829ba56dfa0906', 'RADAR_FRONT_LEFT': '11946c1461d14016a322916157da3c7d', 'RADAR_FRONT_RIGHT': '491209956ee3435a9ec173dad3aaf58b', 'RADAR_BACK_LEFT': '312aa38d0e3e4f01b3124c523e6f9776', 'RADAR_BACK_RIGHT': '07b30d5eb6104e79be58eadf94382bc1', 'LIDAR_TOP': '9d9bf11fb0e144c8b446d54a8a00184f', 'CAM_FRONT': 'e3d495d4ac534d54b321f50006683844', 'CAM_FRONT_RIGHT': 'aac7867ebf4f446395d29fbd60b63b3b', 'CAM_BACK_RIGHT': '79dbb4460a6b40f49f9c150cb118247e', 'CAM_BACK': '03bea5763f0f4722933508d5999c5fd8', 'CAM_BACK_LEFT': '43893a033f9c46d4a51b5e08a67a1eb7', 'CAM_FRONT_LEFT': 'fe5422747a7d4268a4b07fc396707b23'}, 'anns': ['ef63a697930c4b20a6b9791f423351da', '6b89da9bf1f84fd6a5fbe1c3b236f809', '924ee6ac1fed440a9d9e3720aac635a0', '91e3608f55174a319246f361690906ba', 'cd051723ed9c40f692b9266359f547af', '36d52dfedd764b27863375543c965376', '70af124fceeb433ea73a79537e4bea9e', '63b89fe17f3e41ecbe28337e0e35db8e', 'e4a3582721c34f528e3367f0bda9485d', 'fcb2332977ed4203aa4b7e04a538e309', 'a0cac1c12246451684116067ae2611f6', '02248ff567e3497c957c369dc9a1bd5c', '9db977e264964c2887db1e37113cddaa', 'ca9c5dd6cf374aa980fdd81022f016fd', '179b8b54ee74425893387ebc09ee133d', '5b990ac640bf498ca7fd55eaf85d3e12', '16140fbf143d4e26a4a7613cbd3aa0e8', '54939f11a73d4398b14aeef500bf0c23', '83d881a6b3d94ef3a3bc3b585cc514f8', '74986f1604f047b6925d409915265bf7', 'e86330c5538c4858b8d3ffe874556cc5', 'a7bd5bb89e27455bbb3dba89a576b6a1', 'fbd9d8c939b24f0eb6496243a41e8c41', '198023a1fb5343a5b6fad033ab8b7057', 'ffeafb90ecd5429cba23d0be9a5b54ee', 'cc636a58e27e446cbdd030c14f3718fd', '076a7e3ec6244d3b84e7df5ebcbac637', '0603fbaef1234c6c86424b163d2e3141', 'd76bd5dcc62f4c57b9cece1c7bcfabc5', '5acb6c71bcd64aa188804411b28c4c8f', '49b74a5f193c4759b203123b58ca176d', '77519174b48f4853a895f58bb8f98661', 'c5e9455e98bb42c0af7d1990db1df0c9', 'fcc5b4b5c4724179ab24962a39ca6d65', '791d1ca7e228433fa50b01778c32449a', '316d20eb238c43ef9ee195642dd6e3fe', 'cda0a9085607438c9b1ea87f4360dd64', 'e865152aaa194f22b97ad0078c012b21', '7962506dbc24423aa540a5e4c7083dad', '29cca6a580924b72a90b9dd6e7710d3e', 'a6f7d4bb60374f868144c5ba4431bf4c', 'f1ae3f713ba946069fa084a6b8626fbf', 'd7af8ede316546f68d4ab4f3dbf03f88', '91cb8f15ed4444e99470d43515e50c1d', 'bc638d33e89848f58c0b3ccf3900c8bb', '26fb370c13f844de9d1830f6176ebab6', '7e66fdf908d84237943c833e6c1b317a', '67c5dbb3ddcc4aff8ec5140930723c37', 'eaf2532c820740ae905bb7ed78fb1037', '3e2d17fa9aa5484d9cabc1dfca532193', 'de6bd5ffbed24aa59c8891f8d9c32c44', '9d51d699f635478fbbcd82a70396dd62', 'b7cbc6d0e80e4dfda7164871ece6cb71', '563a3f547bd64a2f9969278c5ef447fd', 'df8917888b81424f8c0670939e61d885', 'bb3ef5ced8854640910132b11b597348', 'a522ce1d7f6545d7955779f25d01783b', '1fafb2468af5481ca9967407af219c32', '05de82bdb8484623906bb9d97ae87542', 'bfedb0d85e164b7697d1e72dd971fb72', 'ca0f85b4f0d44beb9b7ff87b1ab37ff5', 'bca4bbfdef3d4de980842f28be80b3ca', 'a834fb0389a8453c810c3330e3503e16', '6c804cb7d78943b195045082c5c2d7fa', 'adf1594def9e4722b952fea33b307937', '49f76277d07541c5a584aa14c9d28754', '15a3b4d60b514db5a3468e2aef72a90c', '18cc2837f2b9457c80af0761a0b83ccc', '2bfcc693ae9946daba1d9f2724478fd4']}
- 直接使用下方代码,可以直接打印
nuscenes.list_sample(sample["token"])
'''
Sample: ca9a282c9e77460f8360f564131a8af5sample_data_token: 37091c75b9704e0daa829ba56dfa0906, mod: radar, channel: RADAR_FRONT
sample_data_token: 11946c1461d14016a322916157da3c7d, mod: radar, channel: RADAR_FRONT_LEFT
sample_data_token: 491209956ee3435a9ec173dad3aaf58b, mod: radar, channel: RADAR_FRONT_RIGHT
sample_data_token: 312aa38d0e3e4f01b3124c523e6f9776, mod: radar, channel: RADAR_BACK_LEFT
sample_data_token: 07b30d5eb6104e79be58eadf94382bc1, mod: radar, channel: RADAR_BACK_RIGHT
sample_data_token: 9d9bf11fb0e144c8b446d54a8a00184f, mod: lidar, channel: LIDAR_TOP
sample_data_token: e3d495d4ac534d54b321f50006683844, mod: camera, channel: CAM_FRONT
sample_data_token: aac7867ebf4f446395d29fbd60b63b3b, mod: camera, channel: CAM_FRONT_RIGHT
sample_data_token: 79dbb4460a6b40f49f9c150cb118247e, mod: camera, channel: CAM_BACK_RIGHT
sample_data_token: 03bea5763f0f4722933508d5999c5fd8, mod: camera, channel: CAM_BACK
sample_data_token: 43893a033f9c46d4a51b5e08a67a1eb7, mod: camera, channel: CAM_BACK_LEFT
sample_data_token: fe5422747a7d4268a4b07fc396707b23, mod: camera, channel: CAM_FRONT_LEFTsample_annotation_token: ef63a697930c4b20a6b9791f423351da, category: human.pedestrian.adult
sample_annotation_token: 6b89da9bf1f84fd6a5fbe1c3b236f809, category: human.pedestrian.adult
sample_annotation_token: 924ee6ac1fed440a9d9e3720aac635a0, category: vehicle.car
sample_annotation_token: 91e3608f55174a319246f361690906ba, category: human.pedestrian.adult
sample_annotation_token: cd051723ed9c40f692b9266359f547af, category: movable_object.trafficcone
sample_annotation_token: 36d52dfedd764b27863375543c965376, category: vehicle.bicycle
sample_annotation_token: 70af124fceeb433ea73a79537e4bea9e, category: human.pedestrian.adult
sample_annotation_token: 63b89fe17f3e41ecbe28337e0e35db8e, category: vehicle.car
sample_annotation_token: e4a3582721c34f528e3367f0bda9485d, category: human.pedestrian.adult
sample_annotation_token: fcb2332977ed4203aa4b7e04a538e309, category: movable_object.barrier
...
sample_annotation_token: 49f76277d07541c5a584aa14c9d28754, category: vehicle.car
sample_annotation_token: 15a3b4d60b514db5a3468e2aef72a90c, category: movable_object.barrier
sample_annotation_token: 18cc2837f2b9457c80af0761a0b83ccc, category: movable_object.barrier
sample_annotation_token: 2bfcc693ae9946daba1d9f2724478fd4, category: movable_object.barrier
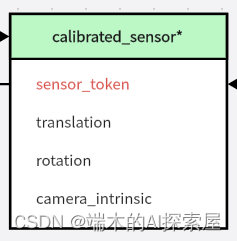
'''3.1.2 数据格式–官网图例
- 这个图例学完下面的代码,回来看。就能取到自己想要的数据。
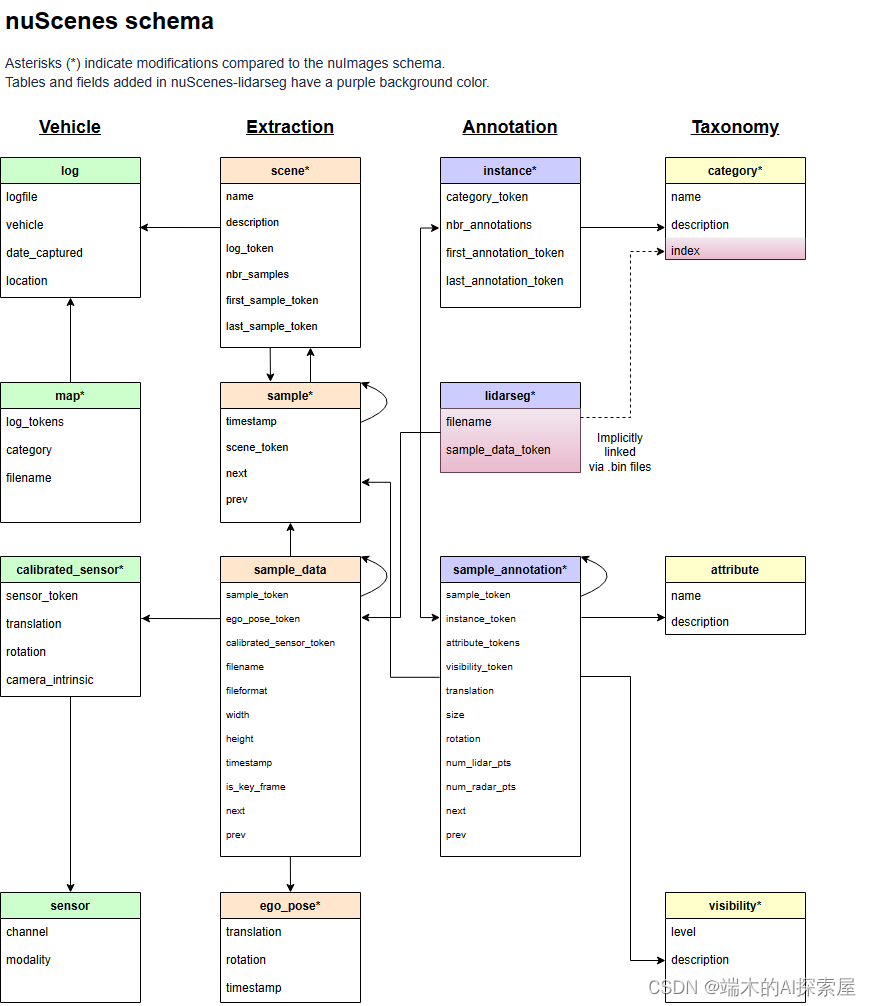
- 得到sample_data,获取不同数据需使用不同代码
- 通过sample_data 的filename 定位到具体文件。用 np.fromfile读取数据
- 通过sample_data 的calibrated_sensor_token,用nuscenes定位定位calibrated_sensor,拿到标定数据
3.1.2.1 上图理解–sample_token 获取 sample_data
sample["data"]["LIDAR_TOP"]sample["data"]中存储了 RADAR LIDAR CAM的信息sample["data"]["LIDAR_TOP"]能拿到相机对应的sample_token- 图中的弧线箭头,我理解为通过这个 sample_token 是能够获得 sample_data的
sample_data = nuscenes.get('sample_data', lidar_sample_token)是通过sample_token 获得 sample_data的具体方法- 当得到了 sample_data 我们就能得到 sample_data 中的其他信息
print(sample_data)
{'token': '9d9bf11fb0e144c8b446d54a8a00184f',
'sample_token': 'ca9a282c9e77460f8360f564131a8af5',
'ego_pose_token': '9d9bf11fb0e144c8b446d54a8a00184f',
'calibrated_sensor_token': 'a183049901c24361a6b0b11b8013137c',
'timestamp': 1532402927647951,
'fileformat': 'pcd',
'is_key_frame': True,
'height': 0,
'width': 0,
'filename': 'samples/LIDAR_TOP/n015-2018-07-24-11-22-45+0800__LIDAR_TOP__1532402927647951.pcd.bin',
'prev': '',
'next': '0cedf1d2d652468d92d23491136b5d15',
'sensor_modality': 'lidar',
'channel': 'LIDAR_TOP'}
可视化
- 会输出名字为123.png的图像
nuscenes.render_sample_data(lidar_sample_data["token"], out_path="./123")3.1.2.2 通过sampe_data中的filename拿到具体的雷达数据.pcd.bin文件
lidar_filename = sample_data["filename"] # samples/LIDAR_TOP/n015-2018-07-24-11-22-45+0800__LIDAR_TOP__1532402927647951.pcd.bin
data = np.fromfile(os.path.join(dataroot, lidar_filename), dtype=np.float32).reshape(-1, 5)
print(data.shape) # (34688, 5) #x y z intensity ring_index
- 实际上拿到的是某种路径:
samples/LIDAR_TOP/n015-2018-07-24-11-22-45+0800__LIDAR_TOP__1532402927647951.pcd.bin - 暂时理解为
os.path.join(dataroot, lidar_filename)
3.2 坐标系的理解
3. 坐标系3.1 全局坐标系,global coordinate- 可以简单的认为,车辆在t0时刻的位置认为是全局坐标系的原点 3.2 车体坐标系,ego_pose. ego coordinate- 以车体为原点的坐标系3.3 传感器坐标系- lidar 的坐标系- camera 的坐标系- radar 的坐标系
3.3 标定的理解
- 第一个理解。整个过程如下:
- 即将 lidar 点云转换到 global,再转换到图片上
过程为 timestamp = t0 时的lidar_points -> ego_pose0 -> global -> ego_pose1 -> camera -> intrinsic -> image
- 第二个理解,拿到 4*4 变换矩阵的过程
4. 标定calibater
lidar的标定,获得的结果是:lidar相对于ego而言的位置(translation),和旋转(rotation) - translation 可以用3个float数字表示位置- 相对于ego而言的位置- rotation则是用4个float表示旋转,用的是四元数camera的标定,获得的结果是:camera相对于ego而言的位置 (translation),和旋转(rotation) - translation 可以用3个float数字表示位置- 相对于ego而言的位置- rotation则是用4个float表示旋转,用的是四元数- carmera 还多了一个camera_intrinsic 相机的内参(3d->2d平面)- 相机畸变参数(目前nuScenes数据集不考虑)
- 通过
lidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"])类似的语句,就能拿到传感器的标定
3.3.1 LIDAR calibrated_sensor
- 主要完成 lidar_points -> ego_pose0 -> global
拿到 lidar 相对 ego 的标定数据
通过 lidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"]) 拿到 lidar 的标定数据。
标定数据 rotation 四元数 转 旋 转矩阵的过程。
'''
# lidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"])
# calibrated_sensor 中的rotation属性使用四元数
lidar_calibrated_data["rotation"] ----》[0.7077955119163518, -0.006492242056004365, 0.010646214713995808, -0.7063073142877817]Quaternion(lidar_calibrated_data["rotation"]).rotation_matrix- 使用四元数转换成旋转矩阵,如下:[[ 0.00203327 0.99970406 0.02424172][-0.99998053 0.00217566 -0.00584864][-0.00589965 -0.02422936 0.99968902]]
'''
旋转矩阵平移矩阵合并
理解lidar 旋转矩阵 与 平移矩阵 合并
- 旋转矩阵是 3*3 与 平移矩阵
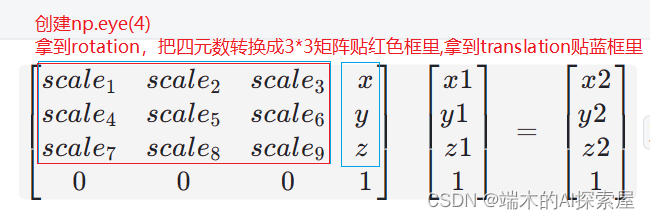
- 合并就是创建一个4*4 的对角矩阵,把前三行前三列替换为旋转矩阵。前三行第四列替换为
- 二维数据的矩阵一般22就搞定,旋转和平移合并就变成33.这里用二维,简单理解3维为啥要变成4*4。 [ s c a l e 0 x 0 s c a l e y 0 0 1 ] [ x 1 y 1 1 ] = [ x 2 y 2 1 ] \begin{bmatrix} scale&0&x\\ 0&scale&y \\ 0&0&1\end{bmatrix} \begin{bmatrix} x1\\ y1 \\ 1\end{bmatrix} = \begin{bmatrix} x2\\ y2 \\ 1\end{bmatrix} scale000scale0xy1 x1y11 = x2y21
- 代码
def get_matrix(calibrated_data):output = np.eye(4)output[:3, :3] = Quaternion(calibrated_data["rotation"]).rotation_matrixoutput[:3, 3] = calibrated_data["translation"]return outputlidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"])
# 6.1.2
# lidar_to_ego_matrix 是基于ego而言的。
# point = lidar_to_ego_matrix @ lidar_points.T 代表了lidar -> ego 的过程。
lidar_to_ego_matrix = get_matrix(lidar_calibrated_data)
print(lidar_to_ego_matrix)
'''
[[ 0.00203327 0.99970406 0.02424172 0.943713 ][-0.99998053 0.00217566 -0.00584864 0. ][-0.00589965 -0.02422936 0.99968902 1.84023 ][ 0. 0. 0. 1. ]]
'''- $$\begin{bmatrix} scale_1&scale_2&scale_3&x\\ scale_4&scale_5&scale_6&y \\ scale_7&scale_8&scale_9&z \\
0&0&0&1\end{bmatrix} \begin{bmatrix} x1\\ y1 \\ z1 \\1\end{bmatrix} = \begin{bmatrix} x2\\ y2 \\z2\\ 1\end{bmatrix} $$lidar_points.T 是方便矩阵乘法
[图片]#### 得到 lidar_to_ego_matrix```python
lidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"])
lidar_to_ego_matrix = get_matrix(lidar_calibrated_data)
print(lidar_to_ego_matrix)
'''
[[ 0.00203327 0.99970406 0.02424172 0.943713 ][-0.99998053 0.00217566 -0.00584864 0. ][-0.00589965 -0.02422936 0.99968902 1.84023 ][ 0. 0. 0. 1. ]]
拿到 ego 相对于 global 的标定
ego_pose_data0 = nuscenes.get("ego_pose", lidar_sample_data["ego_pose_token"])
# print(ego_pose_data0)
'''
{'token': '9d9bf11fb0e144c8b446d54a8a00184f',
'timestamp': 1532402927647951,
'rotation': [0.5720320396729045, -0.0016977771610471074, 0.011798001930183783, -0.8201446642457809],
'translation': [411.3039349319818, 1180.8903791765097, 0.0]}
'''
拿到 ego_to_global_matrix
go_to_global_matrix = get_matrix(ego_pose_data0)
print(ego_to_global_matrix)
'''
[[-3.45552926e-01 9.38257989e-01 1.62825160e-02 4.11303935e+02][-9.38338111e-01 -3.45280305e-01 -1.74097708e-02 1.18089038e+03][-1.07128245e-02 -2.12945025e-02 9.99715849e-01 0.00000000e+00][ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
'''
具体变换
lidar_to_global_matrix = ego_to_global_matrix @ lidar_to_ego_matrix # lidar-ego-global
global_points = lidar_point @ lidar_to_global_matrix.T # 真正变换点
代码
def get_matrix(calibrated_data, inverse=False):"""args:@calibrated_data : calibrated_sensor对象。一般通过nuscenes.get("calibrated_sensor",token..)得到@inverse : 是否取逆矩阵。具体根据calibrated_sensor对象里面的 rotation 与 translation 计算出一个4*4的旋转平移矩阵。如果inverse设置为ture。则对这个矩阵逆变换"""output = np.eye(4)output[:3, :3] = Quaternion(calibrated_data["rotation"]).rotation_matrixoutput[:3, 3] = calibrated_data["translation"]if inverse:output = np.linalg.inv(output)return outputlidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"])# 6.1.2
# lidar_to_ego_matrix 是基于ego而言的。
# point = lidar_to_ego_matrix @ lidar_points.T 代表了lidar -> ego 的过程。
lidar_to_ego_matrix = get_matrix(lidar_calibrated_data)
print(lidar_to_ego_matrix)
'''
[[ 0.00203327 0.99970406 0.02424172 0.943713 ][-0.99998053 0.00217566 -0.00584864 0. ][-0.00589965 -0.02422936 0.99968902 1.84023 ][ 0. 0. 0. 1. ]]
'''# 6.2 timestamp = t0 时的ego_pose0 -> global
# ego_to_global_matrix 是基于ego而言的。
# point = ego_to_global_matrix @ lidar_points.T
ego_pose_data0 = nuscenes.get("ego_pose", lidar_sample_data["ego_pose_token"])
# print(ego_pose_data0)
'''
{'token': '9d9bf11fb0e144c8b446d54a8a00184f',
'timestamp': 1532402927647951,
'rotation': [0.5720320396729045, -0.0016977771610471074, 0.011798001930183783, -0.8201446642457809],
'translation': [411.3039349319818, 1180.8903791765097, 0.0]}
'''
ego_to_global_matrix = get_matrix(ego_pose_data0)
print(ego_to_global_matrix)
'''
[[-3.45552926e-01 9.38257989e-01 1.62825160e-02 4.11303935e+02][-9.38338111e-01 -3.45280305e-01 -1.74097708e-02 1.18089038e+03][-1.07128245e-02 -2.12945025e-02 9.99715849e-01 0.00000000e+00][ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
'''
3.3.2 相机 camera 的标定
- 主要完成 global -> ego_pose1 -> camera -> intrinsic -> image
- camera 有很多,要循环处理
- 相机标定注意点。求得的变换矩阵后,求逆矩阵
拿到 camera 相对 ego 的标定数据
通过 lidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"]) 拿到 lidar 的标定数据。
- 代码
camera_token = sample["data"][cam]
camera_data = nuscenes.get("sample_data", camera_token)image_file = os.path.join(dataroot, camera_data["filename"])
image = cv2.imread(image_file)camera_calibrated_token = camera_data["calibrated_sensor_token"]
camera_calibrated_data = nuscenes.get("calibrated_sensor", camera_calibrated_token)
'''camera多了camera_intrinsic 所以写下来。
{'token': '75ad8e2a8a3f4594a13db2398430d097',
'sensor_token': 'ec4b5d41840a509984f7ec36419d4c09',
'translation': [1.52387798135, 0.494631336551, 1.50932822144],
'rotation': [0.6757265034669446, -0.6736266522251881, 0.21214015046209478, -0.21122827103904068],
'camera_intrinsic': [[1272.5979470598488, 0.0, 826.6154927353808], [0.0, 1272.5979470598488, 479.75165386361925], [0.0, 0.0, 1.0]]}得到camera_to_ego_matrix,然后取逆,得到ego_to_camera_matrix
ego_to_camera_matrix = get_matrix(camera_calibrated_data, True) # 不加True得到的是camera_to_ego_matrix
拿到 ego 相对于 global 的标定
camera_ego_pose = nuscenes.get("ego_pose", camera_data["ego_pose_token"])
拿到 ego_to_global_matrix,然后取逆,得到 global_to_ego_matrix
global_to_ego_matrix = get_matrix(camera_ego_pose, True) # 不加True得到的是ego_to_global_matrix
相比 lidar,新增相机内参矩阵
## 7.2 新增步骤,处理camera_intrinsiccamera_intrinsic = np.eye(4)camera_intrinsic[:3, :3] = camera_calibrated_data["camera_intrinsic"] # shape= 【3 * 3】
具体变换
global_to_image = camera_intrinsic @ ego_to_camera_matrix @ global_to_ego_matrix
3.3.3 画框
for token in sample["anns"]:annotation = nuscenes.get("sample_annotation", token)box = Box(annotation["translation"], annotation['size'], Quaternion(annotation["rotation"]))corners = box.corners().T # box.corners()形状是[3, 8]global_corners = np.concatenate((corners, np.ones((len(corners), 1))), axis=1)image_base_corners = global_corners @ global_to_image.Timage_base_corners[:, :2] /= image_base_corners[:, [2]]image_base_corners = image_base_corners.astype(np.int32)ix, iy = [0, 1, 2, 3, 0, 1, 2, 3, 4, 5, 6, 7], [4, 5, 6, 7, 1, 2, 3, 0, 5, 6, 7, 4]for p0, p1 in zip(image_base_corners[ix], image_base_corners[iy]):if p0[2] <= 0 or p1[2] <= 0: continuecv2.line(image, (p0[0], p0[1]), (p1[0], p1[1]), (0, 255, 0), 2, 16)''' 循环表示,画0 与 4 的边 画1 与 5 的边 画2 与 6 的边 画3 与 7 的边 画0 与 1 的边 画1 与 2 的边 画2 与 3 的边 画3 与 0 的边 画4 与 5 的边 画5 与 6 的边 画6 与 7 的边 画7 与 4 的边 0 ------ 1/ | / |4 ------ 5 || 3 ---|-- 2 | / | /7 ------ 6'''
可视化
nuscenes.render_annotation(token, out_path="./234")
这篇关于Nuscenes数据集点云数据如何转换到图像上的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





