mavros专题

使用鱼香肉丝一键安装重新安装ROS后mavros节点报错,.so文件不匹配
解决方案: 1、写在mavros相关软件,共卸载7个包 sudo apt-get remove ros-melodic-mav* 2、重新安装mavros,共安装10个包 sudo apt-get remove ros-melodic-mav*

TX2(RTSO-9002)环境配置(ROS,mavros,arduino,ttyACM,串口)
TX2 环境配置 1、TX2 ubuntu16.04换源 备份文件: sudo cp /etc/apt/sources.list /etc/apt/sources_init.list 打开文件: /etc/apt/sources.list 将该文件的内容替换成如下内容: deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-po
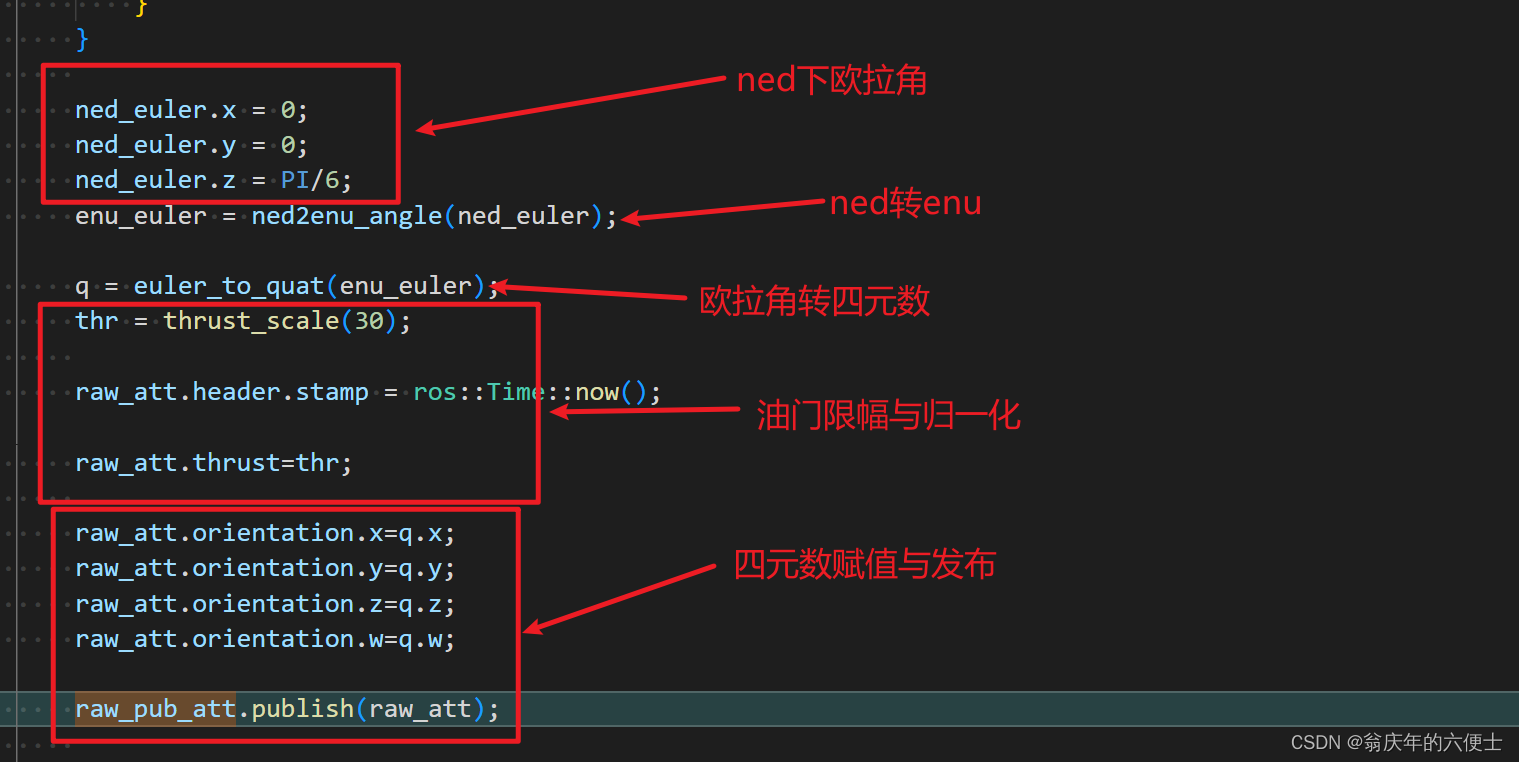
2.2 mavros发布姿指令控制PX4
说明 使用遥控飞行 px4在stablize模式下,我们使用遥控器去控制px4飞行; 在飞行过程中,通常我们用4个通道就可以控制飞机飞行; 其中roll、pitch、yaw打杆的量就是我们期望无人机达到的姿态; 而throttle就是油门的大小; 自主飞行 不通过遥控器去发指令,而是由程序去发类似的指令控制px4飞行; 就可以达到和人在stablize下控制无人机一样的效果(但愿如此);
Ubuntu20.04 安装 ROS noetic + MAVROS
本文在 AlphaCatOvO【ROS】在 Ubuntu 20.04 安装 ROS 的详细教程 基础上,根据实际安装经验,稍微进行补充。 一、安装Ubuntu20.04 假设已经正确安装。 二、安装 ROS noetic 2.1 换源 执行 sudo apt updatesudo mv /etc/apt/sources.list /etc/apt/sources_default.li
MAVROS与机载电脑Jetson nano通信
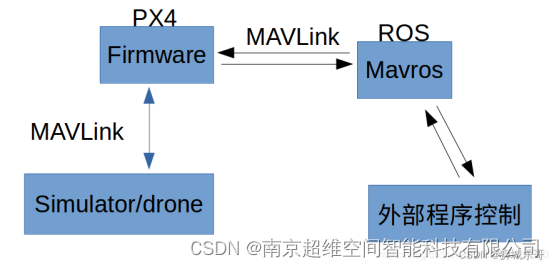
简介:MAVROS和Jetson nano通信,设置飞控参数和MAVROS文件,实现飞控和机载电脑的通信。MAVROS相当于PX4飞控中的MAVLINK模块。MAVROS将话题转为MAVLINK格式消息发送给飞控,飞控中的MAVLINK模块将MAVLINK格式消息转化为uORB消息给PX4各模块间传递消息使用,也可以反过来从uORB消息一直到ROS话题。 MAVROS简介 ROS结合PX4
MAVROS的进一步理解
一、Mavros简介 顾名思义, mavros就是mavlink+ros。mavros是PX4官方提供的一个运行于ros下收发mavlink消息的工具,利用mavros可以发送mavlink消息给飞控(可以控制飞机),并且可以从飞控中接受数据(例如:飞控的位置速度 IMU数据等等)。在px4中,mavlink模块负责接收和发送mavlink消息。(比如和QGC地面站通信)在机载电脑中,mavro
【无人机学习篇】构建mavros机载电脑连接,从机载电脑获取pixhawk数据
(本文基于的pixhawk版本:6X minibase V2.2 ,固件:apm) 整个的步骤(baseline): 具体的每一步都可以在网上查到教程,这里只是梳理出一个流程。并且ubantu与ros的版本也不是必须和我的一致,也可以是ubantu18.04与ros melodic 在机载电脑上安装ubantu20.04(ros必备运行环境) 安装ros noetic(mavros必备运行环
【无人机学习篇】构建mavros机载电脑连接,从机载电脑获取pixhawk数据
(本文基于的pixhawk版本:6X minibase V2.2 ,固件:apm) 整个的步骤(baseline): 具体的每一步都可以在网上查到教程,这里只是梳理出一个流程。并且ubantu与ros的版本也不是必须和我的一致,也可以是ubantu18.04与ros melodic 在机载电脑上安装ubantu20.04(ros必备运行环境) 安装ros noetic(mavros必备运行环

GAAS的px4_mavros_run.py 代码分析(这也应该是GAAS的基础核心控制部分代码)
https://github.com/generalized-intelligence/GAAS/blob/master/software/px4_mavros_scripts/1_px4_mavros_offboard_controller/px4_mavros_run.py 这个文件在七月在线的GAAS第9节课有一个比较详细的讲解。当然在第四节课的最后也有简单提到。

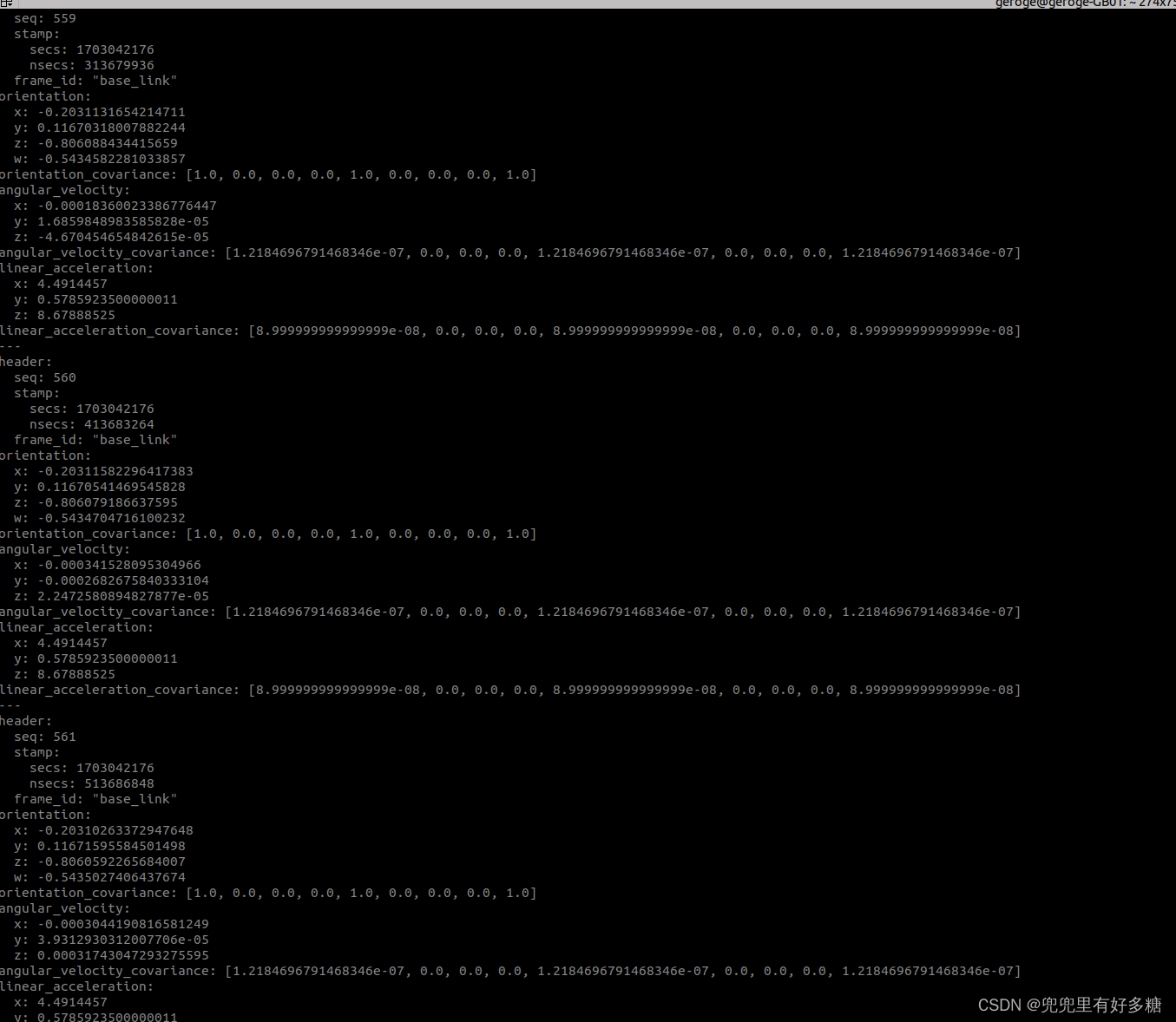
rostopic hz /mavros/vision_pose/pose可以查看一个消息的频率
rostopic hz /mavros/vision_pose/pose可以查看一个消息的频率 rostopic hz 可以查看一个消息的频率 。

MAVROS安装教程
2021.3.14 现在系统性地知道了软件在linux一般都有两种安装方法,一种下载源码编译安装,一种二进制安装,现在看MAVROS官方给的安装教程(马熙/mavros - Gitee.com)也确实是这两种,再次说明了我这种理解的正确性。当然我之前都是二进制安装,毕竟也方便些应该。 ========================================================

PX4官方手册给的mavros-offborad代码页面复制,做备份用,方便自己日后随时翻看。
PX4官方手册给的mavros-offborad代码页面复制,做备份用,方便自己日后随时翻看。 也就是这个页面 摘自:https://dev.px4.cc/master/en/ros/mavros_offboard.html MAVROS Offboard control example This tutorial shows the basics of Offboard contr
PX4官方手册给的mavros-offborad代码页面复制,做备份用,方便自己日后随时翻看。
PX4官方手册给的mavros-offborad代码页面复制,做备份用,方便自己日后随时翻看。 也就是这个页面 摘自:https://dev.px4.cc/master/en/ros/mavros_offboard.html MAVROS Offboard control example This tutorial shows the basics of Offboard contr

对PX4官方手册里mavros-offboard代码注释讲解的博文合集
https://blog.csdn.net/sinat_16643223/article/details/114249331 下面前两个其实是转载的同一篇文章,只是转载时间不同,最近看理解又更深了。 https://blog.csdn.net/sinat_16643223/article/details/114196439 https://blog.csdn.net/sinat
对PX4官方手册里mavros-offboard代码注释讲解的博文合集
https://blog.csdn.net/sinat_16643223/article/details/114249331 下面前两个其实是转载的同一篇文章,只是转载时间不同,最近看理解又更深了。 https://blog.csdn.net/sinat_16643223/article/details/114196439 https://blog.csdn.net/sinat

XTDrone里面就有现成的基于vins-Fusion的无人机定点的仿真,也确实和我想的一样只需要把vins-Fusion发布的odemetry类型话题转为对应给mavros的话题发给飞控就可以了。
XTDrone里面就有现成的基于vins-Fusion的无人机定点的仿真,也确实和我想的一样只需要把vins-Fusion发布的odemetry类型话题转为对应给mavros的话题发给飞控就可以了。 这上面我觉得XTDrone是做得比普罗米修斯好的 https://www.yuque.com/xtdrone/manual_cn/vio

*MAVROS应该是一直在不断地读取飞控内部的状态数据并自动以ROS话题的形式发布出来,它并不知道谁在订阅,哪个节点想订阅到自然能订阅到。(这也应该是为什么MAVROS有个消息黑名单)
我之前还有的一个疑问就是MAVROS怎么知道谁订阅了哪种MAVROS话题呢?我现在觉得啊,是这样啊,就是MAVROS一直在不断地读取飞控内部的状态数据并自动以ROS话题的形式发布出来,它并不知道谁在订阅,哪个节点想订阅到自然能订阅到。 也是受到下面这篇博文的启发,这篇博文我也有转载。 https://blog.csdn.net/SIR_wkp/article/details/87861658
MAVROS 源码分析
转载自:https://blog.csdn.net/SIR_wkp/article/details/87861658 MAVROS 源码分析 SIR_wkp 2019-02-21 17:52:53 2778 收藏 34 分类专栏: PX4代码分析 版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。 本文链接:https://blo

MAVROS代码分析
真正让你对MAVROS官网和Github源码讲,你会发现自己还有很多没有弄清楚,之前还觉得自己对MAVROS已经了解清楚了。你要会讲一个东西,那就不单单是会用那么简单。 首先可以看到github上的MAVROS代码是包括了几个功能包的,从cmakelists看得出来,它自己给的介绍里面也明确说了。 我们应该主要用到MAVROS功能包还有mavros_msgs,我个人是这么觉得的。

对于mavcmd mavftp mavparam mavsafety mavsetp mavsys mavwp是什么,和MAVROS的关系是什么?
对于mavcmd mavftp mavparam mavsafety mavsetp mavsys mavwp是什么,和MAVROS的关系是什么? 似乎是一些命令,但是是在上面地方运行呢? 这命令行莫非指QGC地面站那个给飞控发送命令的地方么?但是和MAVROS有什么关系呢? 我好像在MAVROS的代码(gitee或者github)里搜到了这些。都是一些pyt

MAVROS这里说的Parameters是什么意思?
MAVROS这里说的Parameters是什么意思? 是不是自己可以更改的参数? http://wiki.ros.org/mavros 我看目录发现了,它把Parameter和subscribed topic published topics放一列,我怀疑是不是跟话题,服务,同等的一个ROS中的概念,然后我去搜 ROS Parameter,确实搜出来了。 意

发现类的定义都是写在头文件里面的,QT里面是这样,普罗米修斯也是这样,command_to_mavros.h和state_from_mavros.h
发现类的定义都是写在头文件里面的,QT里面是这样,普罗米修斯也是这样,所以为什么是写两个头文件command_to_mavros.h和state_from_mavros.h 如果我当初四个串口驱动要用面向对象的思想来写,要用类来写,那确实就是要把类写在头文件里面,然后四个cpp包含进去,然后直接里面创建实例化对象就可以了,确实就是这样,现在也更能明白为什么类定义放在头文件里面!!!!而且下次
mavros黑白名单设置
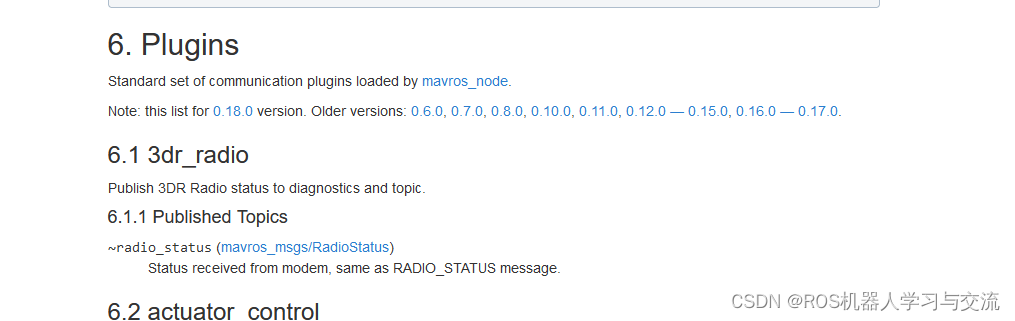
链接: mavros设置黑白名单 设置mavros黑白名单主要是通过插件的参数进行设置,如下: 这里是在px4_pluginlists.yaml参数文件中设置 plugin_blacklist:# common- safety_area- 3dr_radio- actuator_control- hil_controls- ftp- global_position- ma
浅谈 vins 、mavros 和 px4 之间的坐标变换
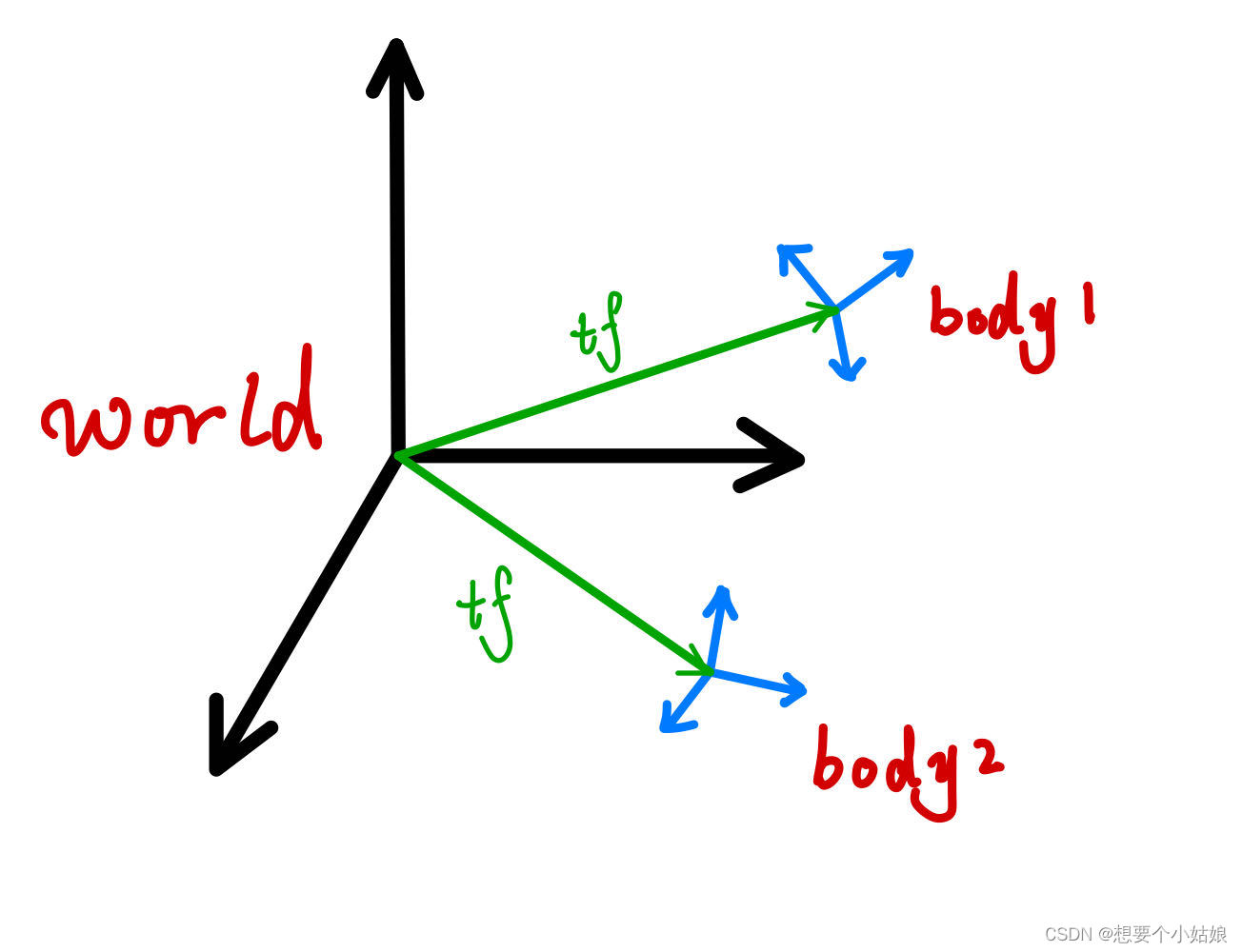
一、前言 在自主无人机系统中,VINS-Fusion、Mavros、PX4 之间的参考坐标系是不同的,而这些坐标系之间的关系又很容易让人产生困惑,本文旨在理清不同模块之间的坐标变换关系,这有利于不同模块之间数据的转换,最后也会给出一些坐标变换方式。 二、 里程计坐标变换关系 本节主要介绍不同的里程计算法,如 VINS-Fusion、msckf_vio、open_vins 等里程计算法与世

Jetson Orin NX 开发指南(9): MAVROS 的安装、配置与运行
一、前言 由于 Jetson 系列开发板常作为自主无人机的机载电脑,而无人机硬件平台如 PX4 和 ArduPilot 等通过 MAVLink 进行发布无人机状态和位姿等信息,要实现机载电脑与 MAVLink 的通信,必须借助 Mavros 功能包,因此,本文主要介绍 Mavros 功能包的安装、配置与使用,主要参考 GitHub - mavlink/mavros at master htt