lvi专题

【LVI-SAM】激光雷达点云处理特征提取LIO-SAM 之FeatureExtraction实现细节
激光雷达点云处理特征提取LIO-SAM 之FeatureExtraction实现细节 1. 特征提取实现过程总结1.0 特征提取过程小结1.1 类 `FeatureExtraction` 的整体结构与作用1.2 详细特征提取的过程1. 平滑度计算(`calculateSmoothness()`)2. 标记遮挡点(`markOccludedPoints()`)3. 特征提取(`extractF
LVI-SAM:使用SAM的激光-视觉-惯导紧耦合里程计
转载自:https://mp.weixin.qq.com/s/MlN-0BD9rAdJwsVco7TRlg LVI-SAM:使用SAM的激光-视觉-惯导紧耦合里程计 原创 泡泡机器人 泡泡机器人SLAM 今天 标题:LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping 作
LVI-SAM配置运行
LVI-SAM运行 源码地址电脑配置环境配置安装过程出现的问题未满足依赖问题安装VTK时,出现报错 编译编译过程中出现的问题运行运行过程中出现的问题setup.bash问题自建引用包报错Resource not found: xacroimage_transport没有规则可制作目标 运行结果开源handheld.bag数据集 源码地址 源码链接:https://github.

LVI-SAM论文重点总结
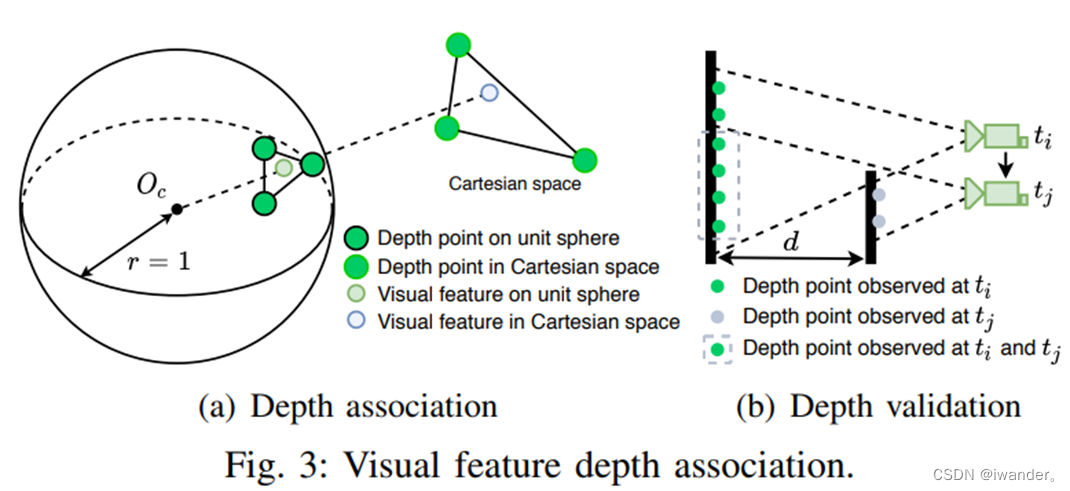
LVI-SAM构建在因子图之上:视觉惯导系统 、 激光惯导系统 视觉惯导系统:利用激光惯导的估计来做初始化、利用激光的测量得到精度更高的深度信息 激光惯导系统:利用视觉惯导的初值来做帧间匹配、做回环检测 其中一个不工作时,另外一个可以正常工作 介绍 视觉惯导系统执行利用雷达帧恢复深度的视觉特征的跟踪,通过优化视觉重投影误差和imu测量误差的视觉里程计为激光雷达的激光匹配提供初值,并把约束

ubuntu18.04 lvi-sam复现
环境 ubuntu18.04 ros1 pcl v1.8 gtsam v 4.0.2 eigen3 v 3.3.4 cat /usr/include/eigen3/Eigen/src/Core/util/Macros.h# EIGEN 版本查询 boost v 1.65.1ceres v 1.14.0 ros 安装 安装教程很多,不赘述了。 gtsam 安装 !!!! 安装包
lvi-sam 代码阅读 和 总结
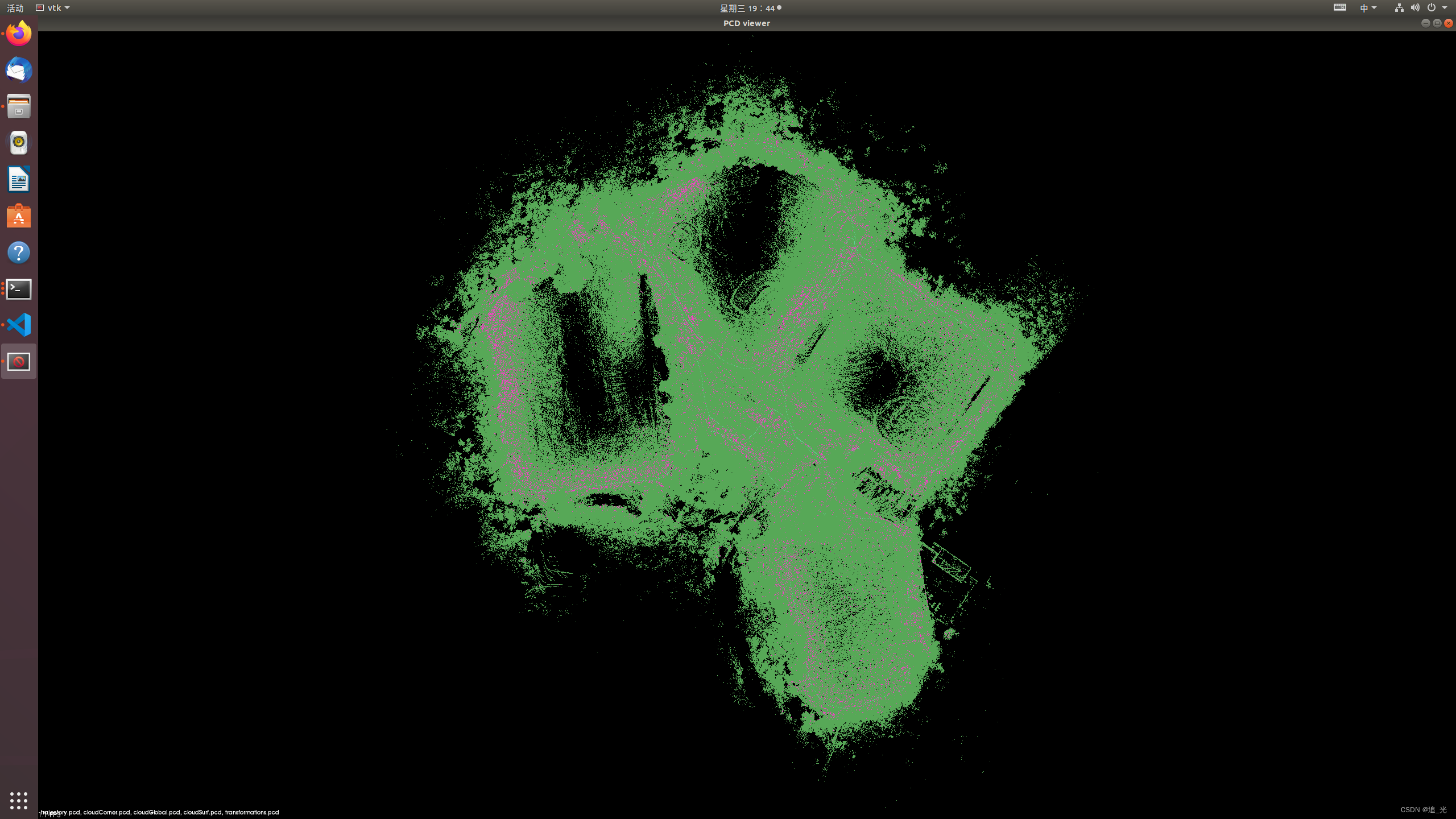
文章目录 Lvi-sam心得依赖运行 vinsvisual_featurelidar_callbackimg_callbackreadImageget_depth visual_odometryimu_callbackodom_callbackfeature_callbackprocess main_threadother_functiongetMeasurementsgetOdometry
LVI-SAM源码解析(一):论文阅读
1. 摘要 LVI-SAM是一种基于平滑化和映射实现的激光雷达-视觉-IMU紧耦合SLAM方法,能够实现高精度、高鲁棒性地实时状态估计和地图构建。 LVI-SAM建立于包含两个子系统的因子图上:视觉-IMU子系统(VIS)和激光-IMU子系统(LIS),两个子系统采用紧耦合设计方式。其中VIS利用LIS进行初始化,利用LiDAR测量的深度信息提高精度,LIS利用VIS的估计结果作为扫描匹配
【SLAM】LVI-SAM解析——综述
LVI-SAM可以认为是LIO-SAM和VINS-MONO的合体,在此基础上的修改不大。 github: https://github.com/TixiaoShan/LVI-SAM paper: LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping 有一个注释版的代码:http

![15-[LVI-SAM]分析总结](https://img-blog.csdnimg.cn/4aecb58d14ae4eb6817f0e6572c17003.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAbG95ZXJfa29uZw==,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
15-[LVI-SAM]分析总结
2021SC@SDUSC LVI-SAM分析总结 这是我的LVI-SAM代码分析的最后一篇。在这一篇,我会做一个总结,对我前面的Blog做一个综述,分享在分析的过程中,我的收获。 文章目录 LVI-SAM分析总结1. 综述2. imageProjection3. visual_feature4. visual_odometry5. 节点交互a. imageProjectionb.

LVI-SAM安装与测试
1 介绍 就在昨天,LVI-SAM开源了,它是一个lidar-visual-inertial里程计和建图系统,在系统级别结合了LIO-SAM和Vins-Mono的优势。作者之前还开源了LeGO-LOAM和LIO-SAM,膜拜并致敬。 Github:https://github.com/TixiaoShan/LVI-SAM 论文:https://arxiv.org/abs/2104.10831