本文主要是介绍【SLAM】LVI-SAM解析——综述,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
LVI-SAM可以认为是LIO-SAM和VINS-MONO的合体,在此基础上的修改不大。
github: https://github.com/TixiaoShan/LVI-SAM
paper: LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping
有一个注释版的代码:https://github.com/electech6/LVI-SAM_detailed_comments
这个注释版代码中一些关于坐标系的注释我认为是有错误的,大家擦亮眼睛。LIO-SAM和VINS-MONO我也分别写过比较详细的代码解析,详情见链接。
1. 综述
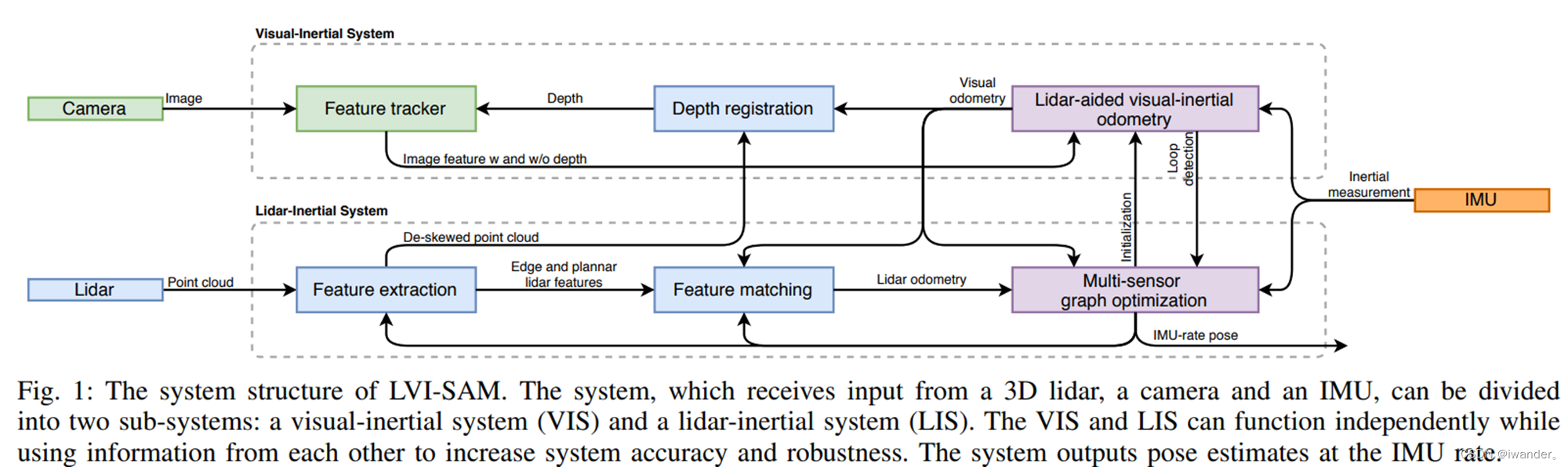
这个是论文里的流程图,很贴心的介绍了LVI-SAM改了哪些地方:
1.VINS-MONO的初始化由LIO-SAM的imuPreintefration提供;
2.VINS-MONO的feature_tracker同时和来自LIO-SAM的imageProjection的lidar进行了深度关联,就不用自己进行三角化;
3.LIO-SAM的imageProjection订阅的里程计来自VINS-MONO的estimator的imucallback提供的高频里程计;
4.VINS只进行回环检测,不做重定位,回环检测的结果提供给LIO-SAM的mapOptimization进行icp匹配+全局图优化。
代码流程图如下:
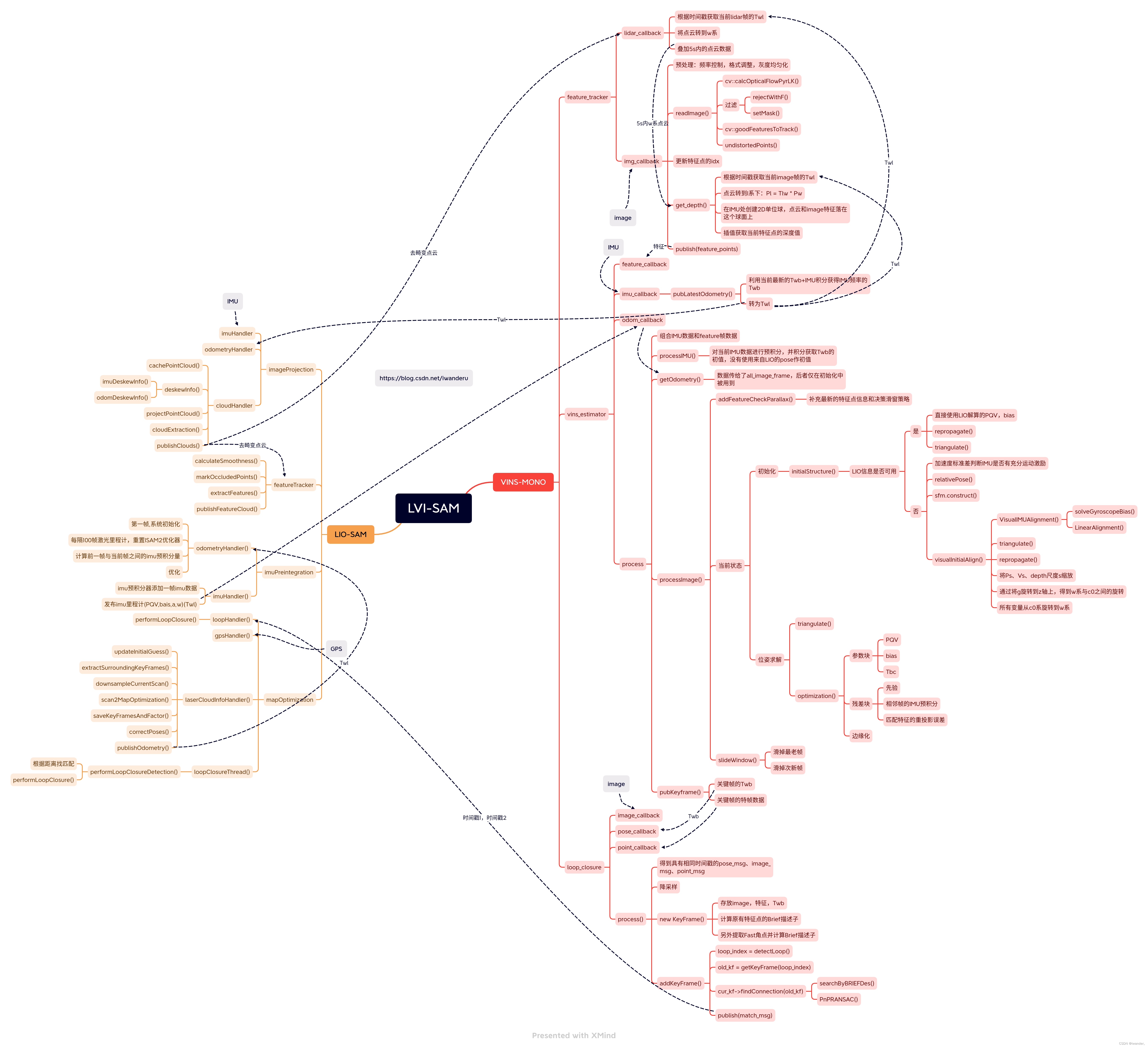
在代码里,论文中指出的来自vio的between factor并没有加上:
2.注意事项
2.1 官方数据集的坐标系统
代码里坐标系系统比较混乱,官方数据集的坐标系是这样的:

红色是相机坐标系,蓝色是lidar坐标系,绿色是LVI-SAM的坐标系,橙色是VINS的坐标系,也就是IMU坐标系。官方配置文件中params_camera.yaml里的lidar_to_cam_XX外参指蓝色和绿色之间的外参,并不是蓝色和红色之间的外参。
此外,Feature_tracker_node的get_depth()中给特征点赋予lidar深度时,忽略了cam和lidar之间的平移,即image特征的单位球和点云的单位球球心不统一,分别是cam和IMU,rotation是统一的,都是为lidar的R。
3. LVI-SAM主要改了哪些地方
3.1. image feature的数据关联
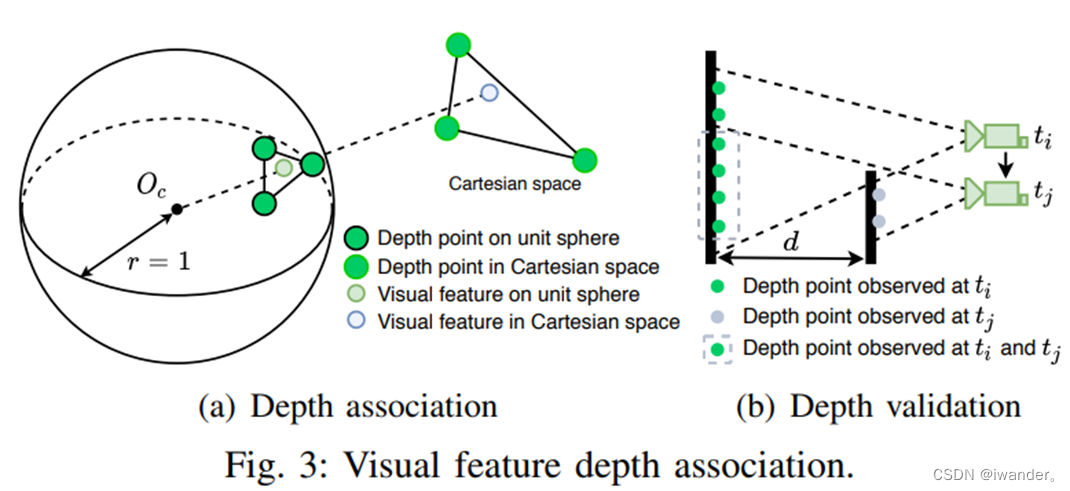
在一个位于相机中心的单位球体上投影视觉特征和激光雷达深度点,借助球面2D kdtree找到球体上最近的三个深度点。特征深度是由视觉特征和照相机中心Oc形成的线的长度,它与笛卡尔空间中由三个深度点形成的平面相交。
考虑到每帧image都会对应积攒了一段时间的lidar点云,持续被追踪的特征点可能会投影上不同的深度值。所以他们会检查一个特征点附近的深度值差判断是否采用该深度值。
lidar点云的积攒:visual_odometry/visual_feature/feature_tracker_node.cpp:lidar_callback()
深度关联:visual_odometry/visual_feature/feature_tracker.h:get_depth()
3.2 VINS的初始化
整个系统最开始初始化的地方是LIO-SAM的mapOptimization的updateInitialGuess()这里,第一帧会使用9轴IMU的pitch,roll信息确定R,首帧lidarpose确定之后提供给IMUPreintegration联合imu预积分量进行图优化,然后再发布高频的imuPose被vins-estimator-node订阅,用它计算得到的PQV+bias对VINS系统进行初始化。
获取LIO-SAM的数据: visual_odometry/visual_estimator/initial/initial_alignment.h:Class odometryRegister
VINS初始化:visual_odometry/visual_estimator/estimator.cpp: initialStructure()
3.3 其它
还有就是VINS给LIO-SAM提供pose初值,还有回环检测,这些内容都比较简单,就不贴地址了。
这篇关于【SLAM】LVI-SAM解析——综述的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





