kinetic专题

hector_quadrotor编译总结 | ubuntu 16.04 ros-kinetic版本
hector_quadrotor编译总结 | ubuntu 16.04 ros-kinetic版本 基于Ubuntu 16.04 LTS系统所用ROS版本为 Kinetic hector_quadrotor ROS包主要用于四旋翼无人机的建模、控制和仿真。 1.安装依赖库 所需系统及依赖库 Ubuntu 16.04|ros-kinetic|Gazebo|gazebo_ros_pkgs|ge

ubuntu 16.04LTS ros-kinetic 安装,环境配置
请先阅读ros 官网 安装部分,链接地址 ros 官网安装,若还有问题,可参阅本文 安装ROS 0: 如果安装linux后还没有更换源,请点击以下链接更换,当然也可以用别的方式;若以更换源,忽略这一步 更改源 1:设置你的电脑可以从 packages.ros.org 接收软件 sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubunt
VM中Ubuntu16.04的下载以及ROS—kinetic的版本下载
一、Ubuntu镜像地址 转载备份一下; 官方下载地址(不推荐) https://www.ubuntu.com/downloadhttps://www.ubuntu.com/download 中科大源 Index of /ubuntu-releases/16.04/http://mirrors.ustc.edu.cn/ubuntu-releases/16.04/ 阿里云开源镜像站

Kinetic Technologies授权世强硬创代理,DC-DC转换器尺寸小、发热量低
为能够更好的服务国内消费电子、通信、工业、汽车和企业系统客户,持续满足他们对高效、智能集成电路产品的需求,世强先进(深圳)科技股份有限公司(下称:“世强先进”)与Kinetic Technologies Semiconductor PTE. LTD.(英文简称:Kinetic Technologies;中文简称“芯凯电子”)签署授权代理合作。 据了解,Kinetic Technologies

Ubuntu16.04 ROS kinetic使用moveit小结
Ubuntu16.04 ROS kinetic使用moveit小结 最近使用moveit中的MoveGroupPython接口控制UR3机械臂移动,在这个过程中踩了一些坑,特将填坑的过程记录一下。 问题一: [ WARN] [1567497398.552827574]: Fail: ABORTED: No motion plan found. No execution at

ubuntu16.04+ros-kinetic+aubo-gps 安装
ubuntu16.04+ros-kinetic+aubo-gps 安装 一 安装依赖二 下载以及预编译源码三 ROS Setup和编译功能包四 测试AUBO——GPS示例 前提已安装 ros-kinetic+gazebo 一 安装依赖 python 使用Python 2.7版本。 #python 依赖sudo apt install python-pippip inst
Ros-kinetic学习Moveit!配置小结
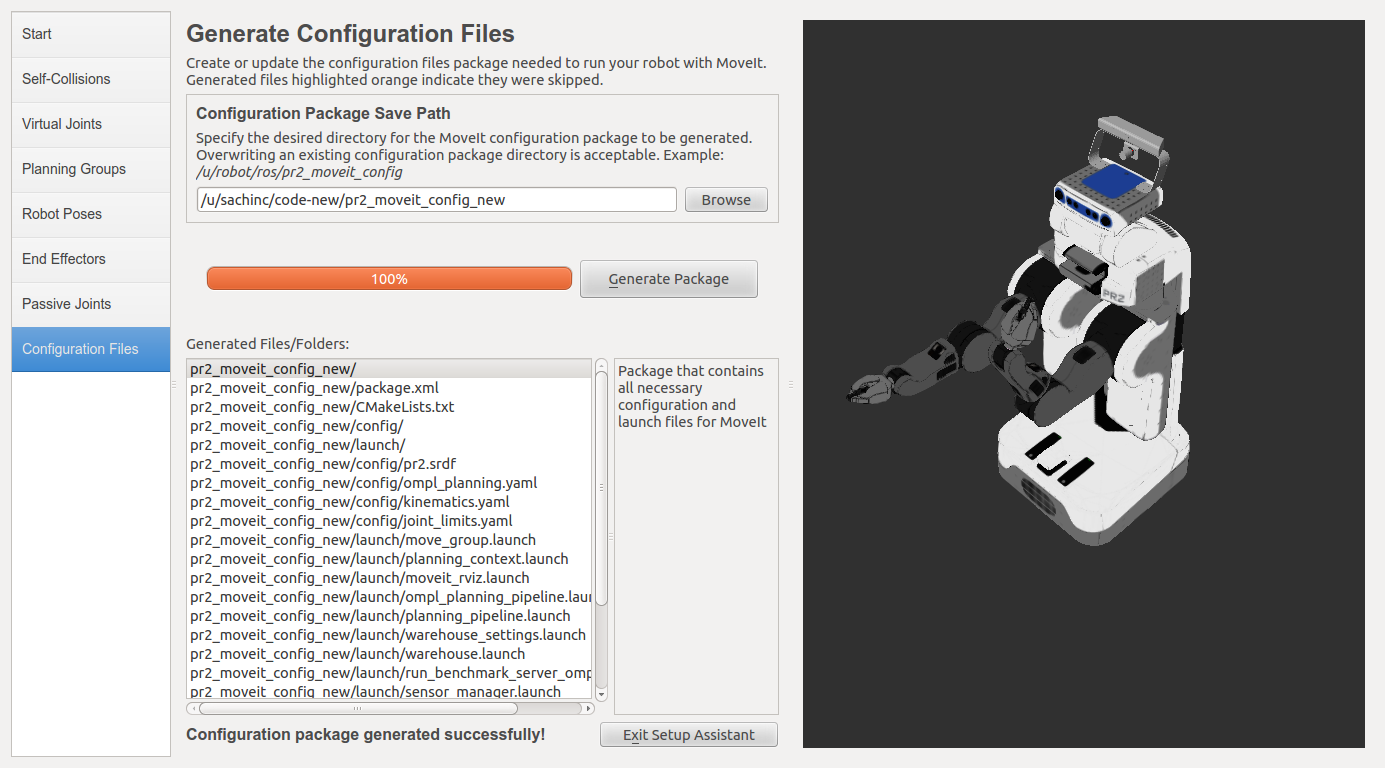
Ros-kinetic 的Moveit!教程网上并不多,但与indigo的配置方法类似。 首先,安装Moveit! sudo apt-get install ros-kinetic-moveitsource /opt/ros/kinetic/setup.bash 安装pr2相关文件 sudo apt-get install ros-kinetic-pr2-common 打开Mo

CoppeliaSim学习笔记之CoppeliaSim Edu V4.1.0 + Ubuntu 16.04 + ROS Kinetic环境搭建与基础测试
文章目录 1. 环境搭建2. 基础测试3. 自定义消息/服务编译使用 1. 环境搭建 Ubuntu系统的安装在此不做介绍,网上一搜一箩筐。ROS Kinetic的安装直接参考wiki就行。CoppeliaSim 安装也比较简单,直接官网下载(以7月21日新鲜刚出炉的CoppeliaSim Edu V4.1.0 为例),具体版本根据用户而定,博主使用CoppeliaSim_

Ubuntu16.04、KinectV2、ROS(kinetic)接口iai_kinect2安装
写在最前面,本博客目的一是记录解BUG过程,二是希望自己以后有信心、耐心解决软硬件问题。 背景:一个月之前安装iai_kinect2运行正常,最近想读取点云数据,运行 roslaunch kinect2_bridge kinect2_bridge.launch 一直报错。 can't find compressed-image-transport.cmake
ROS kinetic版本常用资料及操作汇总
1.相关网站 走弓字形参考代码 https://www.ncnynl.com/archives/201703/1479.html 走三角形代码 https://blog.csdn.net/ywj447/article/details/53318411 节点控制与通信部分可参考 https://blog.csdn.net/under_maple/article/details/49430765 学
ROS kinetic 运行s_msckf和 vins_fusion
s_msckf:采用多状态约束的双目vio系统 !!!注意imuCallback:接收IMU数据,将IMU数据存到imu_msg_buffer中,这里只会利用开头200帧IMU数据进行静止初始化,不做其他处理。featureCallback:接收双目特征,进行后端处理。利用IMU进行EKF Propagation,利用双目特征进行EKF Update。静止初始化(initializeGravi

Ubuntu16.04安装ROS Kinetic时遇到的问题
## Ubuntu16.04安装ROS Kinetic时遇到的问题 sudo rosdep init 出现以下问题: pkg_resources.DistributionNotFound: The ‘rosdep==0.20.0’ distribution was not found and is required by the application 说明没有在系统中找到对应的rosdep版
Ubuntu 16.04 + GTX1060 + CUDA9.0 + CUDNN7.0 + TensorFlow 1.6 + Caffe + ROS Kinetic 环境配置
近期给实验室电脑配了显卡, 因此就把原来没有GPU配置的环境都配好了。记录一下配置过程及遇到的问题,希望能帮到大家。 我是直接重装系统装的,因此显卡驱动什么都没装,屏幕分辨率很低,但没事,CUDA中有默认的显卡驱动。 1)CUDA9.0 上官网下载CUDA9.0 看了支持系统 只有16.04和17.04 因此 下载对应版本(14.04不支持)的runfile。 Ctrl + Alt
raspberryp4 ros kinetic install
https://blog.csdn.net/sinat_23857245/article/details/45225147 # 编辑 `/etc/apt/sources.list` 文件,删除原文件所有内容,用以下内容取代:deb http://mirrors.ustc.edu.cn/raspbian/raspbian/ buster main non-free contribdeb-src
![[安装配置]Ubuntu 16.04 配置RGBD SLAMv2 ROS kinetic](/front/images/it_default2.jpg)
[安装配置]Ubuntu 16.04 配置RGBD SLAMv2 ROS kinetic
主要安装配置参考GitHub的wiki,也可以参考这一篇,两篇一样的,推荐后者。一步一步照着安装。 主要会遇到的问题有两点: C++11的编译问题SET(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11") PCL1.8问题 ubuntu通过apt安装是1.7,会出现问题。通过源码编译安装,速度很慢。 创客智造有一篇文章 主要是修改kinect驱动

python3中无法import cv2,importError: /opt/ros/kinetic/lib/python2.7/dist-packages/cv2.so
这个问题就是importError: /opt/ros/kinetic/lib/python2.7/dist-packages/cv2.so,为什么会出现这个问题?因为当初安装cv2的时候,默认弄在了Python2,所以导致这个错误的产生,解决办法在这篇文章中被找到。不过里面的解决办法太多,好多都不行,只有这个成功使用,所以建议还是看我这个接下来的解决办法。 1 先进入包,不过有的ubuntu
RTP(Robi改造计划)--- Stretch可以跑Kinetic了
折腾了蛮久更新版本,起因是gcc 4.9不支持结构体指定初始化但是我很喜欢它;于是打算更新成5.x或者6.x,然后连操作系统一起更新成stretch了---虽然这风险很大,但是我就是这么轴啊。。。紧接着ROS肯定是不行了,于是也干脆更新为kinetic算了。 好消息是kinetic在raspberry的源码编译比indigo好多了;当然选择ros_comm, 后续再添加,好过浪费时间在不需要的
E: 仓库 “http://cn.archive.ubuntu.com/ubuntu kinetic Release” 没有 Release 文件。
sudo apt-get update时报以下错误: E: 仓库 “http://cn.archive.ubuntu.com/ubuntu kinetic Release” 没有 Release 文件。N: 无法安全地用该源进行更新,所以默认禁用该源。N: 参见 apt-secure(8) 手册以了解仓库创建和用户配置方面的细节。E: 仓库 “http://cn.archive.ubunt

Ubuntu16.04 ROS kinetic 版本的rivz教程和rviz读入播放bag类型文件
首先开始下载arbotix。因为arbotix_ros没有kinetic版本,所以需要从github上面克隆。通过以下命令 git clone https://github.com/vanadiumlabs/arbotix_ros.git 本来是需要在catkin_ws/src目录下使用这个命令,但是我这里忘记了,不过没关系,下载完成后把这个文件夹移动到catkin_ws/src目录即可,

Xsense MTI300在 ROS-kinetic下的使用
Xsense MTI 300在 ROS下的使用 1、MTI设备驱动安装及启动(1)驱动安装(2)修改USB接口的权限(3)启动MTI设备 2、MTmanager下载及使用(1)将下载的压缩包解压得到如下的文件(2)执行脚本文件,生成xsens文件(3)解压`mtmanager_linux-x64_2019.2.tar.gz`文件(4)在mtmanager中调整设备的初始方位(5)在mtman