indigo专题

hector_quadrotor编译总结 | ubuntu 14.04 ros-indigo版本
hector_quadrotor编译总结 | ubuntu 14.04 ros-indigo版本 基于Ubuntu 14.04 LTS系统所用ROS版本为 Indigo hector_quadrotor ROS包主要用于四旋翼无人机的建模、控制和仿真。 备注:两种安装方式可选:install the binary packages | install the source files

机器人操作系统ROS Indigo 入门学习(19)——接下来做什么
这个教程将会讨论了解关于在实体或者仿真机器人上使用ROS的更信息。 这个时候你应该理解了ROS的核心概念。 给你一个运行ROS的机器人,你可以运用这些了解去列出机器人发布和订阅的topics,确定这些topics消耗的messags并且写下你自己的处理传感器数据的nodes,并在实际世界中起作用。 ROS最有魅力的地方不是在于它自身中发布者或者订阅者,而是ROS提供了一个标准的架构

机器人操作系统ROS Indigo 入门学习(17)——roswtf入门指南
roswtf的基本介绍 1.1检查你的安装 roswtf会尝试发现你的系统问题: $ roscd $ roswtf 你应该看到: Stack: ros ================================================================================ Static checks summary: No e

机器人操作系统ROS Indigo 入门学习(16)——记录和重放数据
这个教程教会告诉怎样将运行的ROS系统上的数据记录到一个.bag文件,然后再重放数据再产生相同的效果. 1.1记录数据(创建一个bag文件) 这部分将会指导你怎样从一个运行的ROS系统中记录topic的数据.这个topic数据会在一个bag文件中积累. 首先,执行下面的命令: roscore rosrun turtlesim turtlesim_node rosrun turt
机器人操作系统ROS Indigo 入门学习(15)——验证简单的service和client
这个教程将验证简单的service和client. 1.1运行Service 首先要运行: roscore 然后运行service: $ rosrun beginner_tutorials add_two_ints_server (C++) 你会看到: Ready to add two ints. 1.2运行Client: 运行client,加上适当的
机器人操作系统ROS Indigo 入门学习(14)——用C++语言写一个简单的service和client
这篇教程包括怎样去用C++写一个service和一个client. 1.1写一个Service Node 这里我们会创建一个service(“add_two_ints_server”)node,它会接受两个整形数据并且返回它们的和. 进入你在之前教程中创建的catkin工作空间的beginner_tutorials package目录. cd ~/catkin_ws/src/beginne
机器人操作系统ROS Indigo 入门学习(12)——用C++语言写一个简单的发布者和订阅者
这个教程将会包含怎样用C++去写一个发布者和订阅者. 1.1写一个发布者Node “Node”是连接在ROS网络中一个可执行单元的术语.这里我们创建一个会不断广播messages的发布者(“talker”)node. 改变目录到你之前创建的工作空间的beginner_tutorials package中: cd ~/catkin_ws/src/beginner_tutorials
机器人操作系统ROS Indigo 入门学习(11)——创建一个ROS msg和srv
这篇教程将涉及怎样创建和编译msg和srv文件,以及怎样使用命令行工具rosmsg,rossrv 和roscp. 1.1介绍msg和srv msg:msg文件是描叙ROS message字段的简单文本文件.它们用来为messsage产生不同程序语言的源代码. Srv:一个srv文件描叙了一种服务.它由两部分组成:一个请求和一个响应. msg文件储存在一个package的msg目录,

机器人操作系统ROS Indigo 入门学习(9)——理解ROS rqt_console和 roslaunch
1.使用rqt_console和roslaunch 这篇教程将介绍使用rqt_console和rqt_logger_level来调试以及使用roslaunch一次启动许多nodes.如果你使用ROS fuerte或者更早的版本,rqt不是十分完善,请查看这篇文章使用基于old rxthis page. 1.1前提rqt和tuetlesim package 需要用到rqt和tuetle

机器人操作系统ROS Indigo 入门学习(8)——理解ROS service 和parameter
1.理解ROS service和parameter 这个教程将介绍ROS service和parameter和命令行工具rosservice 和rosparameter。 1.1ROS Services ROS Services是nodes之间进行通信的另一种方式.service允许nodes之间发送请求和接受应答. 1.2使用rosservice rosservice可
机器人操作系统ROS Indigo 入门学习(6)——理解ROS Nodes
1.理解ROS Node 这个教程将会介绍ROS图的概念并且会讨论roscoe,rosnode,和rosrun命令行工具。 1.1前提 在这个教程中我们会用到小型仿真器,请安装: $ sudo apt-get install ros-<distro>-ros-tutorials <distro>是你的版本名字 1.2图概念的概论 Nodes:node是使用ROS去和其它
ROS总结——Indigo安装
在Ubuntu 14.04中安装ROS Indigo 本博客是对http://wiki.ros.org/上ROS教程的学习总结,欢迎大家交流学习。 1.配置软件仓库 在软件和更新中,配置Ubuntu 软件仓库(repositories) 以允许 “restricted”、”universe” 和 “multiverse”这三种安装模式。 2.添加 sources.list及keys RO

eclipse(indigo)安装maven插件失败
eclipse的indigo版本在安装maven插件的时候一直报错,最开始不管是用“Install New Software”、”eclipse market place“ 还是离线安装都没法安装成功 Cannot complete the install because one or more required items could not be found. Software bein
Maven安装配置及其插件m2e(Eclipse Indigo 和 MyEclipse8.5)的安装配置
系统:Windows7 使用软件: Maven3.0.3 + Eclipse Indigo JEE 安装Maven 1. 下载解压缩Maven3.0.3,放在某一个目录下 我的目录为:D:\study\greensoft\apache-maven-3.0.3 2. 确认JDK环境已经配置好,JAVA_HOME环境变量配置好。 3. 配置环境变量M2_
Eclipse Indigo 中文字体正常
/**1.最新的Eclipse3.7使用的是Consolas字体,和Ubuntu一样了,看着很好,但是中文文字很小让人看着很不舒服,通过General->Appearance->Colors and Fonts调节字体大小,中文文字还是小一点,调节微软雅黑觉得不好看,不适应,关键是还觉得10号字体正好,可以显示好多代码,不用一个劲的下翻文件,所以很郁闷。2.于是网上找相关方法。网上高手很多。我看

Ubuntu 14.04重装ROS Indigo
安装完ROS后,使用roscore测试显示不能识别该命令. 打开文件夹opt/ros/indigo/bin,没有rosrun或roscore等文件,显示如下,怀疑ROS没装好. 输入如下命令,卸载ROS, sudo apt-get remove ros-* 更换镜像源: 依次点击System Settings - Software & Update - Ubuntu Software
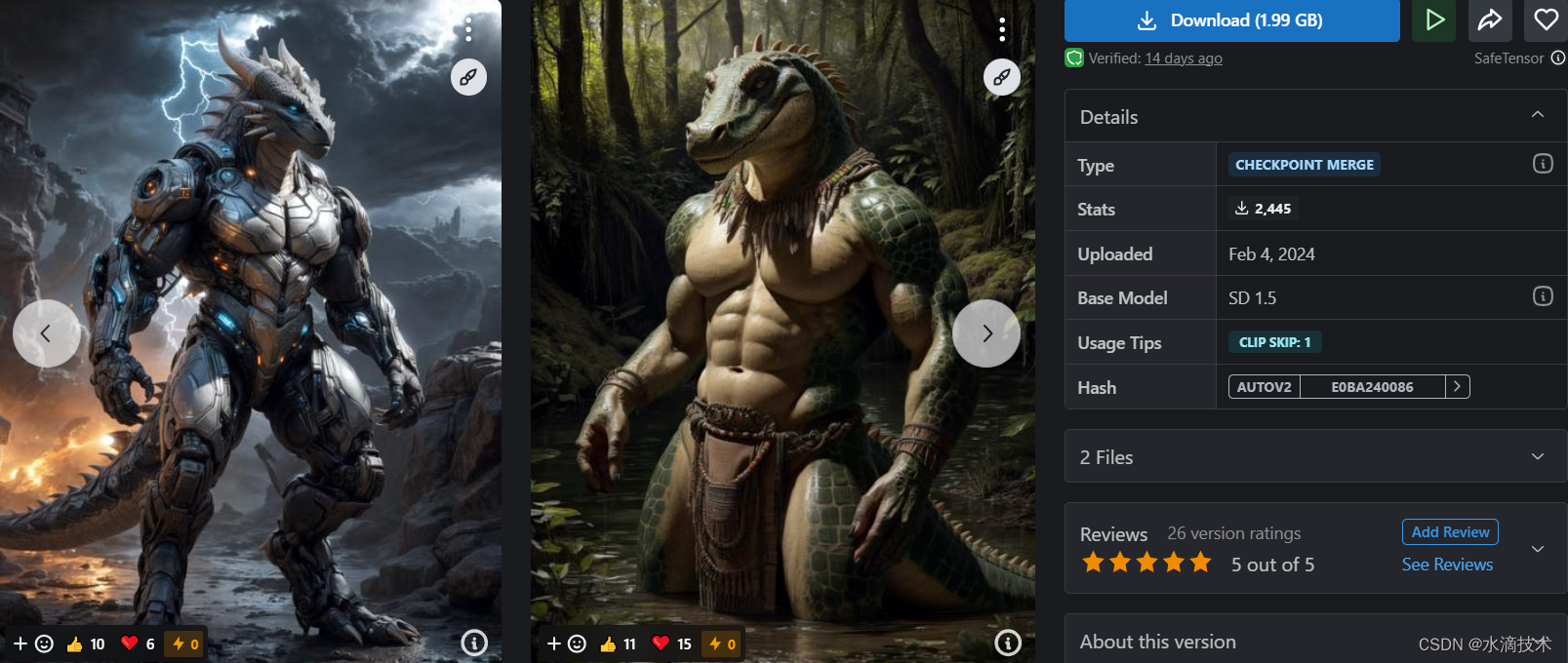
Stable Diffusion 模型分享:Indigo Furry mix(人类与野兽的混合)
本文收录于《AI绘画从入门到精通》专栏,专栏总目录:点这里。 文章目录 模型介绍生成案例案例一案例二案例三案例四案例五案例六案例七案例八案例九案例十
ROS Ubuntu14.04下ROS indigo Eclipse开发环境搭建
目前最优解决方案配置已有Catkin包到Eclipse 1 Global settings in Eclipse IDE2 ROS compile script for Eclipse IDE3 Importing the project into Eclipse4 Adding run configurations to run ROS nodes in Eclipse ROSBUILD

关于eclipse的indigo版中文注释时字体太小的问题
eclipse目前最新版代号indigo, 在win7上使用时中文注释时字体太小的问题. 为什么会这样? 首先我们应该知道, 在win7系统中, font是有"显示"和"隐藏" 状态的. 默认情况下, eclipse使用的默认字体courier new是处于 "隐藏"下的. 这样当eclipse打开时就会使用另一种字体consolas 这时我们看到的字体就是 根据我前面说的字体的状态,
ros_indigo机器视觉
机器视觉 ROS集成了Kinect的的驱动包OpenNI,而且使用OpenCV库可以进行多种多样的图像处理。 1、安装依赖 sudo apt-get install ros-indigo-openni-* sudo apt-get install ros-indigo-openni2-* sudo apt-get install ros-indigo-freenect-* 2、安装We
ros_indigo_arduino
ros_indigo_arduino 1、arduino_IDE_setup 下载arduino-1.6.9-linux-64bit 解压 xz -d arduino-XXX-tar.xz tar -xvf arduino-XXX.tar -C ~/SofeWare/arduino 2、Installingthe Sofeware sudo apt-get installros-
ROS-indigo_stage-simulator
install sudo apt-get install ros-indigo-stage-ros 1)首先在terminal运行 roscore 2)在新的terminal运行 rosrun stage_ros stageros /opt/ros/indigo/share/stage_ros/world/willow-erratic.world 3)控制机器人运动 sudo apt
indigo 安装 V-REP和vrep_ros_bridge
首先,感谢Top Liu 和zhangrelay,本文是学习这两位老师文章之后,实践操作,写之,作为日后参考之用。在此,贴出两位老师的文章,供大家参考: ROS与Matlab系列2:连接vrep仿真器 机器人操作系统ROS(indigo)与三维仿真软件V-Rep(3.2.1)通信接口使用笔记 正文: vrep_ros_bridge提供了V-Rep和ROS之间的通信接口,可以实现使用
indigo_Indigo Release Train中的UI工具:WindowBuilder
indigo 我的Indigo Highlights系列的第5部分重点介绍UI工具。 开发Eclipse SWT,Swing,GWT或RCP / RAP应用程序无关紧要-您一直在寻找UI设计器工具。 那么,Indigo发行版(Eclipse 3.7)有哪些新功能? WindowBuilder –老朋友 自从我第一次搜索用于设计SWT应用程序的UI Designer工具以来,我不知道已
ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02-
在ROS industrial介绍中,给出了ROS和常用机械臂的连接方式。具体信息可以参考:http://wiki.ros.org/Industrial ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02- 补充:https://github.com/robotics/open_abb open-abb-driver Contro