histograms专题

【译】PCL官网教程翻译(17):快速点特征直方图(FPFH)描述符 -Fast Point Feature Histograms (FPFH) descriptors
英文原文阅读 快速点特征直方图(FPFH)描述符 计算复杂度直方图(见点特征直方图(PFH)描述符)对于一个给定的有 n n n个点的点云 P P P为 O ( n k 2 ) O (nk ^ 2) O(nk2), k k k是每个点P的最邻近点个数。对于要求实时或接近实时的应用程序,密集点的特征直方图的计算效率是一个一个主要问题。 本教程描述了PFH公式的简化,称为快速点特征直方图(FPF

【译】PCL官网教程翻译(16):点特征直方图(PFH)描述符 -Point Feature Histograms (PFH) descriptors
英文原网页查看。 点特征直方图(PFH)描述符 就点特征表示而言,表面法线和曲率估计是在表示特定点周围的基本的几何形状方面。虽然计算速度极快,也很容易,但是它们不能捕捉太多的细节,因为它们只能用很少的值来近似一个点的k邻域的几何形状。直接的结果是,大多数场景将包含许多具有相同或非常相似的特征值的点,从而减少了它们的信息特征。 本教程介绍了一组为简单起见而创建的3D特征描述符PFH(点特征直方图


histograms equalization by python-opencv
在HSV空间做局部直方图均衡化对比度增强 import cv2import numpy as npimg = cv2.imread('Lenna.png')img = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)s, v, h = cv2.split(img)# cv2.imwrite('h.jpg', h)# create a CLAHE object (Ar

直方图匹配from skimage.exposure import match_histograms
from skimage.exposure import match_histograms match_histograms 的实现非常简洁有效。直方图匹配或者直方图规定化 import cv2import numpy as npfrom matplotlib import pyplot as pltdef match_histograms(image, reference, *, cha
Histograms of Oriented Gradients (HOG)描述子理解
HOG descriptors 是应用在计算机视觉和图像处理领域,用于目标检测的特征描述器。这项技术是用来计算局部图像梯度的方向信息的统计值。这种方法跟边缘方向直方图(edge orientation histograms)、尺度不变特征变换(scale-invariant feature transform descriptors) 以及形状上下文方法( shape contexts)有很
2013_CVPR_BoF meets HOG Feature Extraction based on Histograms of Oriented p.d.f Gradients for Imag
最近看到一篇较新的基于BOF的改进的特征提取算法,来自cvpr'2013,从大的方面来讲,这篇paper的算法改进主要包括以下几个方面: 1.BOF算法采用把特征映射到word上达到降维的目的,然后统计图像的word直方图,这篇文献采用计算特征的pdf(概率密度函数)的方法获得特征的表达,其中计算pdf采用KDE(核密度估计)的算法。一幅图像用一个pdf来表示。 2.求pdf的梯度:对p

AtCoder AGC035F Two Histograms (组合计数、容斥原理)
题目链接 https://atcoder.jp/contests/agc035/tasks/agc035_f 题解 B题难度的F题……然而我还是不会 假设第\(i\)行染的长度是\(a_i\), 第\(j\)列是\(b_j\) 考虑什么情况下两种方案会重复: 若存在\(i,j\)使得\(a_i+1=j\)且\(b_j=i\), 那么令\(a'_i=j-1,b'_j=i+1\)可以得到一样的结果。
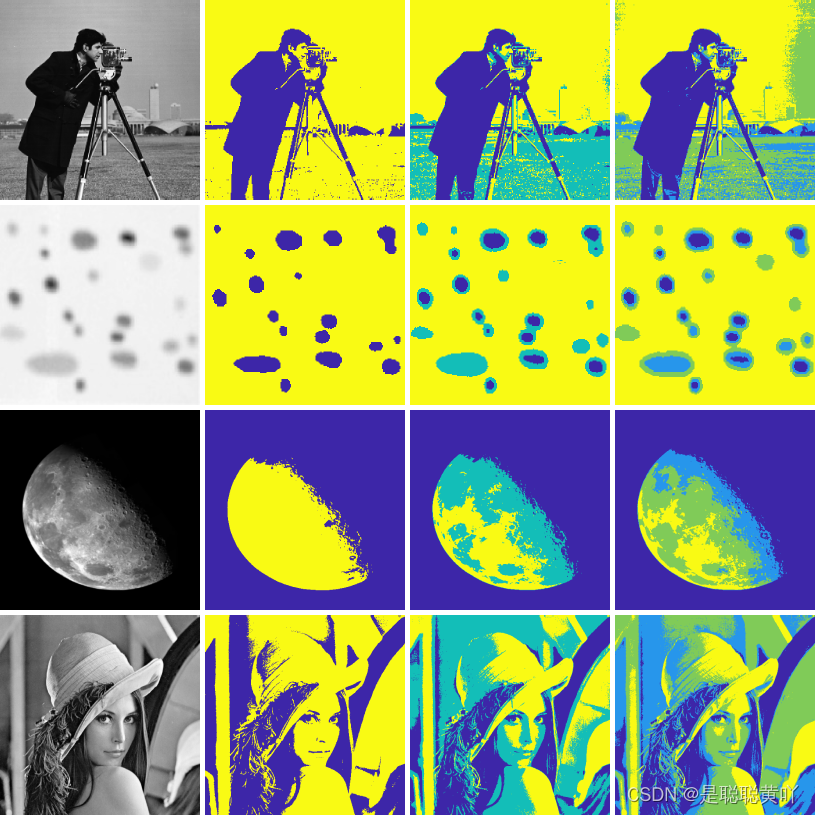
1979-A threshold selection method from gray-level histograms
1 论文简介 《A threshold selection method from gray-level histograms》是由日本学者大津于 1979 年发表在 IEEE TRANSACTIONS ON SYSTEMS 上的一篇论文。该论文提出了一种基于图像灰度直方图的阈值化方法,计算简单,且不受图像亮度和对比度的影响,被称为阈值分割领域的最佳算法之一。以下称 Otsu 法。 2 算法原
快速点特征直方图(FPFH)描述符(Fast Point Feature Histograms (FPFH) descriptors)
点要素直方图的理论计算复杂性(见 点要素直方图(PFH)描述)为给定的ñ点组成的点云P是O(NK ^ 2),这里ķ是对在 P中的每个p点邻居的数量。对于实时或接近实时的应用,密集点邻域中的点特征直方图的计算可能代表主要的瓶颈之一。 本教程描述了PFH公式的简化,称为快速点特征直方图(FPFH)(参见Rusu论文以获取更多信息),这样可以降低算法的计算复杂度O(NK),同时仍保留大部分PFH的判别
![[論文筆記] Monocular Pose Estimation of 3D Objects using Temporally Consistent Local Color Histograms](https://img-blog.csdn.net/20180914044107931?watermark/2/text/aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L0Rlbm5pc19MZWVf/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70)
[論文筆記] Monocular Pose Estimation of 3D Objects using Temporally Consistent Local Color Histograms
Real-Time Monocular Pose Estimation of 3D Objects using Temporally Consistent Local Color Histograms 這是小弟第一篇論文筆記,將來應該會每週更新一篇論文筆記,自己還很菜,文中有些基礎部分知識還沒理解的部分會略過,有機會的話會再補足,若內文有錯誤還請各位多多包涵不吝指正。 背景介紹: 實踐中