hector专题

hector_quadrotor编译总结 | ubuntu 16.04 ros-kinetic版本
hector_quadrotor编译总结 | ubuntu 16.04 ros-kinetic版本 基于Ubuntu 16.04 LTS系统所用ROS版本为 Kinetic hector_quadrotor ROS包主要用于四旋翼无人机的建模、控制和仿真。 1.安装依赖库 所需系统及依赖库 Ubuntu 16.04|ros-kinetic|Gazebo|gazebo_ros_pkgs|ge
hector_quadrotor编译总结 | ubuntu 14.04 ros-indigo版本
hector_quadrotor编译总结 | ubuntu 14.04 ros-indigo版本 基于Ubuntu 14.04 LTS系统所用ROS版本为 Indigo hector_quadrotor ROS包主要用于四旋翼无人机的建模、控制和仿真。 备注:两种安装方式可选:install the binary packages | install the source files
ROS学习记录:launch文件启动Hector_Mapping的建图功能
前言 SLAM软件包Hector_Mapping 在上一篇笔记中,通过Hector_Mapping软件包实现了SLAM功能,运行了四条指令,有些麻烦。本文通过launch文件的使用将指令整合起来,方便功能的实现。 一、打开终端,输入cd catkin_ws1/src/,进入工作空间的src目录。 二、输入catkin_create_pkg slam_pkg roscpp rospy st
ROS学习记录:SLAM软件包Hector_Mapping
前言 了解和尝试使用Hector_Mapping软件包 一、搜索进入ROS Index 二、搜索hector_mapping 三、选择noetic的版本 四、进入Website 五、订阅的话题中,一个是scan话题,就是获取激光雷达数据的话题 六、另一个话题是syscommand话题,主要用来接收reset这类重新建图的指令 七、再看看它发布的话题,第一个是

从零开始搭二维激光SLAM --- Hector论文公式推导与相关代码解析
这篇文章将带领大家推导一下hector slam论文中的公式.之后再对这部分公式对应的代码进行讲解下. markdown打公式太费劲了,所以我用手写了.(懒) 然后csdn又限制了图片文件大小,我是照完照片又截图才传上来的,所以图片有点不清晰. 1 高斯牛顿法 首先借用 <视觉SLAM十四讲> 说明一下高斯牛顿法的思路. 高斯牛顿法首先将目标函数进行一阶泰勒展开,再经过公式推导,可以获得最

从零开始搭二维激光SLAM --- 简单重写 Hector SLAM
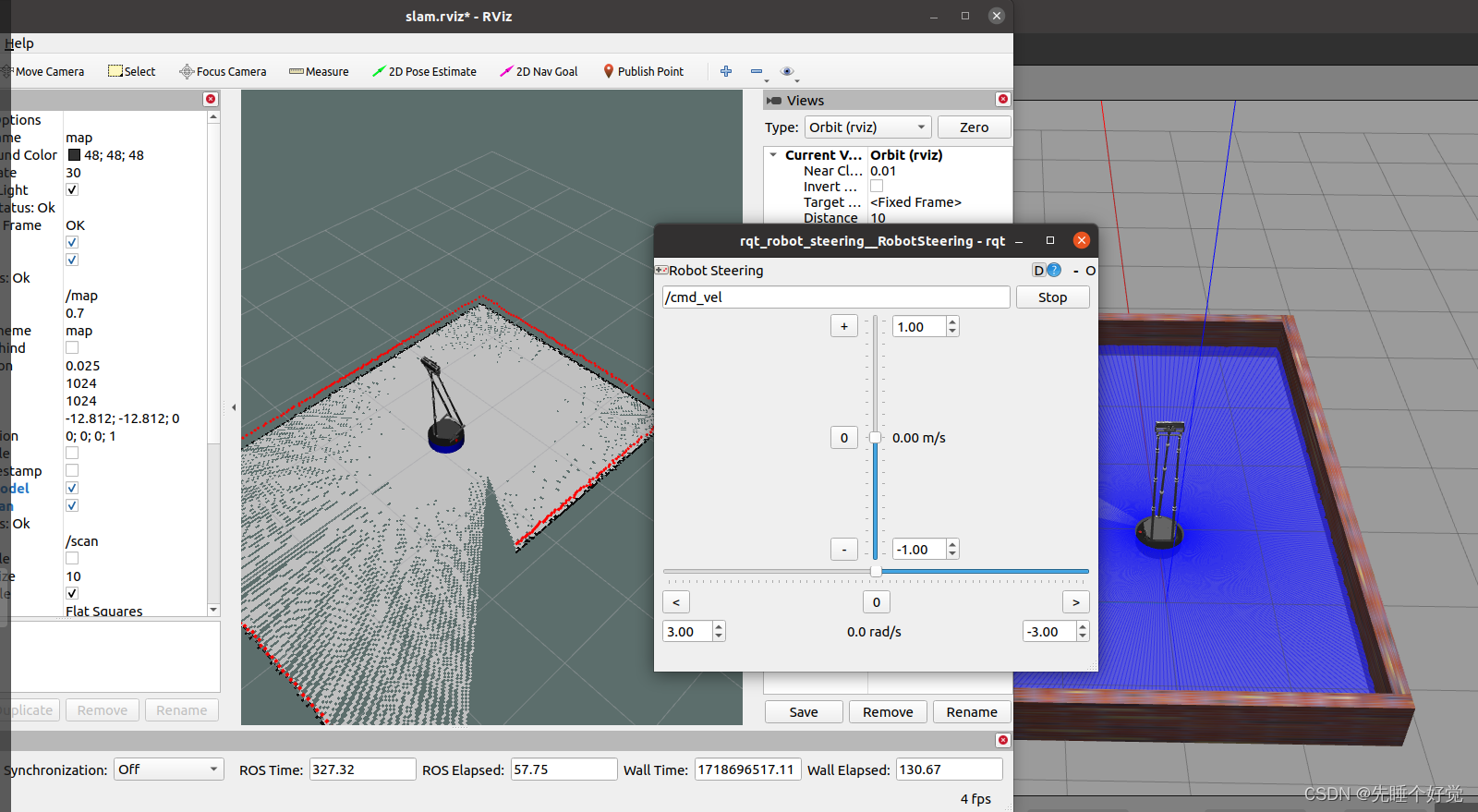
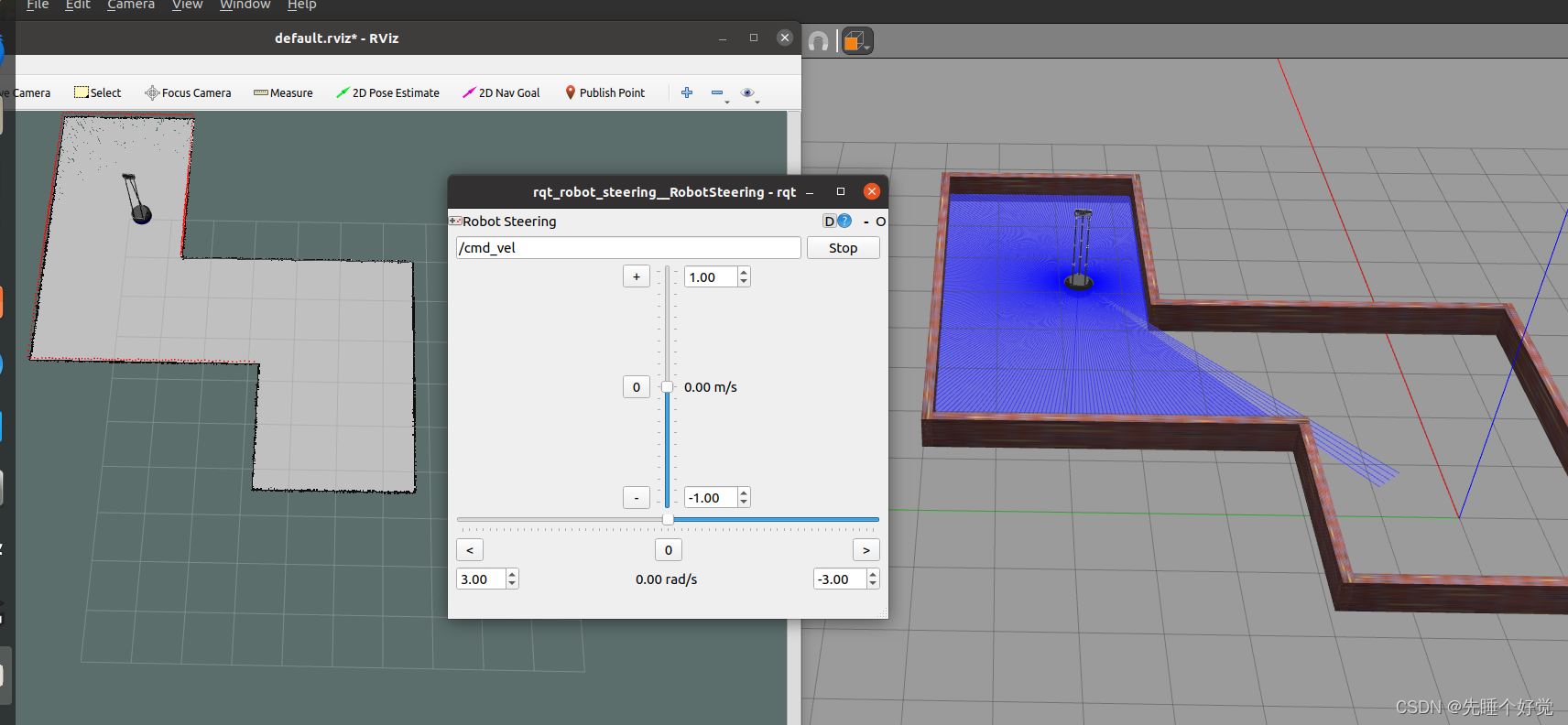
上篇文章讲解了如何在固定位置使用Hector构建单帧的栅格地图,以及知道了SLAM的本质就是将不同时刻的scan在正确的位置上写成栅格地图. 本篇文章将对 Hector 进行简单的重写,使得其代码更简单,更清晰. 这也是本系列教程第一次成功建出一张比较好的地图. 先放图,虽然有些瑕疵,但是整体还是不错的. 话不多说,先说明一下对代码做了那些改变,然后再着重讲解一下 Hector是如何做sc
UST-10LX使用hector_slam构建地图
简述: 本文讲述的是hokuyo UST-10LX在Ubuntu 14.04.5 ROS Indigo下进行实验,然后通过hector_slam构建地图。 slam(Simultaneous Localization andMapping,同步定位与建图)。 ros 中常用的2d slam 算法主要有 gmapping和hector_slam ,其中 hector_slam是个性

使用ust-10lx激光雷达通过hector_slam创建实验室地图
转载说明,特别鸣谢: <1>Hokuyo URG-04LX用hector_slam创建地图(无IMU) http://blog.csdn.net/z15f34/article/details/53237845 <2>妹子教你在ROS中使用Hokuyo激光雷达UST-10LX和UST-30LX http://rosclub.cn/post-515.ht