ethercat专题

【EtherCAT】运行原理
目录 1、有个兄弟提了个问题,如下: 2、EtherCAT运行原理 1、有个兄弟提了个问题,如下: “您好,在这篇文章中https://blog.csdn.net/qq_46211259/article/details/139824335 EtherCAT的数据区有三个子报文,我的问题是,如果要交换过程数据的话,使用LRW不是就可以了吗,LRD和BRD的作用是什么呢

EtherCAT总线
EtherCAT(Ethernet for Control Automation Technology)是一种基于以太网技术的实时工业以太网通信协议,由德国倍福(Beckhoff)公司于2003年推出。它广泛应用于工业自动化领域,特别是在运动控制、机器人、CNC机床等对实时性要求较高的场合。EtherCAT具有高速、实时、低成本和灵活的网络拓扑结构等优点。 EtherCAT 总线的主要特点 高速

EtherCAT运动控制器在SCARA和码垛机械手中的应用
XPLC104H8R硬件介绍 XPLC104H8R是正运动推出的一款高性价比多轴EtherCAT总线+脉冲型运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,是一款集成了Basic、PLC梯形图和HMI组态三种编程方式于一体的运动控制产品。 XPLC104H8R支持4轴运动控制,最多可扩展至32轴,通用IO包含32路输入口和32路输出口,模拟量AD/D

EtherCAT运动控制器上位机开发之Python+Qt(三):PDO配置与SDO读写
ZMC408CE控制器硬件介绍 ZMC408CE是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。 ZMC408CE支持8轴运动控制,最多可扩展至32轴,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。 ZMC

EtherCAT扫盲,都是知识点
1. 什么是EtherCAT EtherCAT,全称Ethernet for Control Automation Technology,字面意思就是用于控制自动化技术的以太网。它是一种基于以太网的实时工业通信协议,简单说,就是让机器们通过网线互相聊天的高级方式。 EtherCAT 是最快的工业以太网技术,同时它提供纳秒级精确的同步。相对于设定了相同循环时间的其他总线系统,Ethe

EtherCAT主站IgH解析(二)-- 如何将Igh移植到Linux/Windows/RTOS等多操作系统
版权声明:本文为本文为博主原创文章,转载请注明出处 https://www.cnblogs.com/wsg1100 如有错误,欢迎指正。 本文简单介绍如何将 igh 移植到 zephyr、freertos、rtems、rtthread等RTOS ,甚至 windows 上。 ##前言 目前,EtherCAT商用主站有:Acontis、TwinCAT3、KPA、Codesys等,开源EtherCA

EtherCAT笔记(二) —— EtherCAT状态机
EtherCAT 状态机 EtherCAT的状态是由一个称为EtherCAT状态机(ESM: EtherCAT State Machine)来控制的。根据EtherCAT的状态,EtherCAT从站可以访问和执行不同的功能。EtherCAT 主站必须向每个状态下的设备发送特定命令,特别是在从站启动期间。 1 EtherCAT状态机: InitPre-Operational: PreOpSaf
EtherCAT主站SOEM -- 31 -- STM32F767-SOEM从站IO模块采集DI及输出DO
EtherCAT主站SOEM -- 31 -- STM32F767-SOEM从站IO模块采集DI及输出DO 0 QT-SOEM及STM32F767-SOEM视频欣赏及源代码链接:0.1 QT-SOEM博客、视频欣赏及源代码链接0.2 STM32F767-SOEM 博客、视频欣赏及源代码链接 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcon

6月6号直播预告 | 认识PCIE464控制卡及其EtherCAT驱动器与控制卡常用回零模式介绍
在智能装备领域,精度、效率和产能是关键的竞争力指标,大多数都面临备货排产要求高、需要调度协同生产和更高的加工精度等问题,特别是在3C电子、半导体设备、锂电光伏等高速高精制造领域。 运动控制系统的性能直接影响生产质量和效率,运动控制系统核心功能如带轴能力、快速响应和硬件触发的实时性等,都是提升产能和品质的决定性因素。 PCIE464—超高速PCIe EtherCAT运动控制卡,通过PCIe高

6月3号直播预告 | 认识PCIE464控制卡及其EtherCAT总线学习和使用
在智能装备领域,精度、效率和产能是关键的竞争力指标,大多数都面临备货排产要求高、需要调度协同生产和更高的加工精度等问题,特别是在3C电子、半导体设备、锂电光伏等高速高精制造领域。 运动控制系统的性能直接影响生产质量和效率,运动控制系统核心功能如带轴能力、快速响应和硬件触发的实时性等,都是提升产能和品质的决定性因素。 PCIE464—超高速PCIe EtherCAT运动控制卡,通过PCIe

EtherCAT运动控制器Delta机械手应用
ZMC406硬件介绍 ZMC406是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。 ZMC406支持6轴运动控制,最多可扩展至32轴,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。 ZMC406支持PLC、
ethercat :推荐一个不错的ethercat主从站开源项目
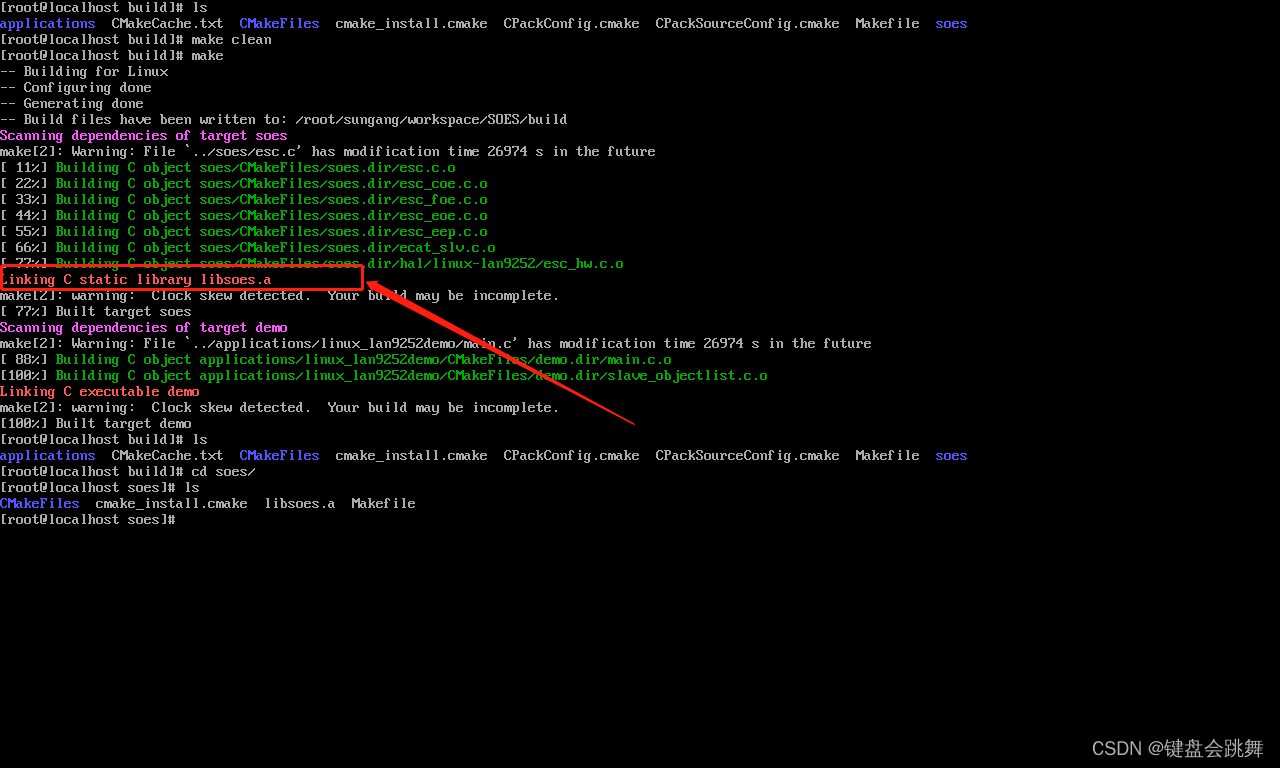
一、引言 最近在研究EtherCAT,也极有兴趣想要搞通整个底层协议,将来有机会搞自己的软件EtherCAT产品。这里推荐一个不错的开源项目,与志同道合的朋友共同学习。 Ethercat-master 主站地址:https://github.com/OpenEtherCATsociety/SOEM Ethercat-slave 从站地址: https://github.com/OpenEthe
EtherCAT通信总线状态监视
1、EtherCAT总线运动控制学习笔记 EtherCAT总线运动控制学习笔记(RXXW_Dor)_汇川pdo控制命令607a-CSDN博客文章浏览阅读3.3k次,点赞3次,收藏9次。说到总线控制,就要说到报文、对象字典、PN通信我们大部分会说报文,EtherCAT通信我们常说对象字典,叫法不一样,但是原理基本一致,下面我们简单认识下上面是对象字典。_汇川pdo控制命令607ahttps://r

汇川AM400PLC通过EtherCAT总线控制禾川X3E伺服使能和点动控制
进行通信之前需要安装禾川X3E的XML文件,具体方法如下: 1、汇川AM400PLC和X3E通信配置 汇川AM400PLC和禾川X3E伺服EtherCAT通信-CSDN博客文章浏览阅读29次。1、汇川H5UPLC和X3E伺服EtherCAT总线控制汇川H5U PLC通过EtherCAT总线控制SV660N和X3E伺服_伺服驱动器 ethercat csdn 汇川-CSDN博客。https://

瑞米派实时系统与EtherCAT移植-米尔Remi Pi
1.概述 Remi Pi采用瑞萨RZ/G2L作为核心处理器,该处理器搭载双核Cortex-A55@1.2GHz+Cortex-M33@200MHz处理器,其内部集成高性能3D加速引擎Mail-G31 GPU(500MHz)和视频处理单元(支持H.264硬件编解码),16位的DDR4-1600 / DDR3L-1333内存控制器、千兆以太网控制器、USB、CAN、SD卡、MIPI-CSI等外设接口

Modbus协议到EtherCAT协议的转换
BL123是一款高效的Modbus转EtherCAT网关,配备2个RS485串口、1个RS232串口和3个以太网口。该网关实现了Modbus协议到EtherCAT协议的转换 为不同协议设备的通信提供了简单可靠的解决方案。广泛适用于自动化生产线、工业设备监控等场景,帮助用户实现设备间数据交换和实时控制。BL123采用高性能处理器和稳定通信模块,确保数据传输的稳定性和可靠性。 下行采集协议支持:
EtherCat转Profinet网关模块,西门子S7-1200 PLC无缝连接新篇章
在本次的专业案例分析中,终端客户选择了开疆智能的通讯协议转换产品,即EtherCat转Profinet网关模块,其目的在于优化控制循环系统内PLC和远程输入/输出(IO)设备之间的数据交动效率。此次应用实例的核心内容是利用一个具体的配置方案,通过该方案,我们将EtherCat转Profinet网关模块与西门子1200 PLC以及EtherCAT耦合器成功实现两者之间的数据通信互联。 实施过程

创龙 AM5728基于GigE相机与EtherCAT的机器视觉控制系统
AM5728是TI Sitara系列高性能SOC,得益于异构多核处理架构,CPU内集成了多核DSP、多核PRU、IVA-HD、GPU等协处理单元,通过硬件加速的方式极大增强CPU的数据、多媒体处理能力,可满足工业协议支持、大数据计算、实时控制等应用需求。 广州创龙基于TI AM5728浮点双DSPC66x +双ARMCortex-A15处理器设计的开发板,其中双核

EtherCAT运动控制器的MATLAB开发
一.ZMC408CE硬件介绍 ZMC408CE是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。 ZMC408CE支持8轴运动控制,最多可扩展至32轴,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。 ZMC4
EtherCAT主站SOEM -- 29 -- STM32F767-SOEM通过 CSP模式(周期同步位置模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 29 -- STM32F767-SOEM通过 CSP模式(周期同步位置模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcontrol.h1.4 motrorcontrol.cpp1
Trinamic推出EtherCAT从站控制芯片TMC8461TMC8462
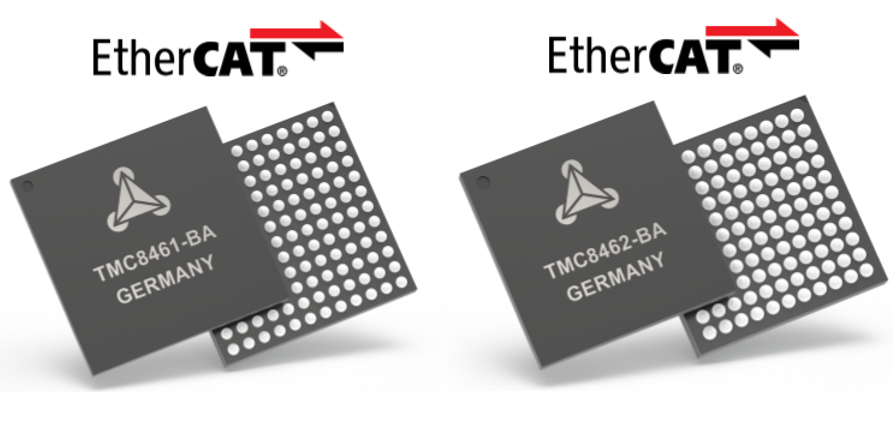
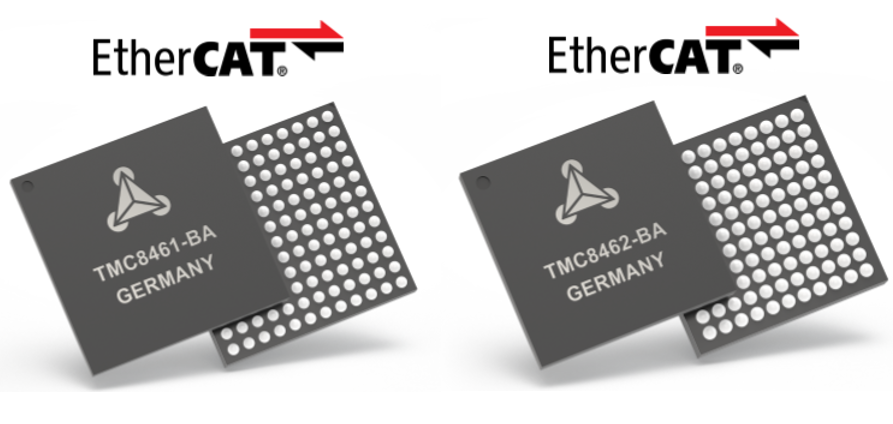
Trinamic推出针对实时优化的完整EtherCAT从站控制器 TMC8461和TMC8462是第一款具有高电压I/ O和集成实时电机控制外设的EtherCAT从控制器。 TMC8461和TMC8462是全球首款具有24V高压I / O和两个集成开关稳压器的EtherCAT从站控制芯片。TMC8462还具有两个集成的以太网PHY,可最大限度地减少电路板空间。这两款IC都通过集成P
Trinamic推出实时通讯EtherCAT从站控制芯片TMC8461TMC8462
Trinamic推出针对实时优化的完整EtherCAT从站控制器 TMC8461和TMC8462是第一款具有高电压I/ O和集成实时电机控制外设的EtherCAT从控制器。 TMC8461和TMC8462是全球首款具有24V高压I / O和两个集成开关稳压器的EtherCAT从站控制芯片。TMC8462还具有两个集成的以太网PHY,可最大限度地减少电路板空间。这两款IC都通过集成P
EtherCAT主站SOEM -- 28 -- STM32F767-SOEM通过 CSV模式(周期同步速度模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 28 -- STM32F767-SOEM通过 CSV模式(周期同步速度模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcontrol.h1.4 motrorcontrol.cpp1
EtherCAT主站SOEM -- 27 -- STM32F767-SOEM通过 PT模式(力矩模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 27 -- STM32F767-SOEM通过 PT模式(力矩模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcontrol.h1.4 motrorcontrol.cpp1.5 ma
EtherCAT主站SOEM -- 25 -- STM32F767-SOEM通过 PV模式(速度模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 25 -- STM32F767-SOEM通过 PV模式(速度模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载0.3 STM32F7-SOEM视频预览0.4 STM32F7-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 m

EtherCAT偏移时间的理解
在使用TwinCAT测试伺服时,有一个特别容易忽视的参数。 上图为TwinCAT上设置的偏移时间的接口 从站侧观察,在EtherCAT的DC模式下(同步模式),从站先使用PDI中断接收主站发来的数据(帧解析由ESC完成),然后在DC中断(一般sync0中断)处理数据,比如开关一个IO 或者写入指令到设备的控制环等等。这里的PDI和Sync0中断的间隔时间,就是所谓的偏移时间。 上