本文主要是介绍EtherCAT偏移时间的理解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在使用TwinCAT测试伺服时,有一个特别容易忽视的参数。
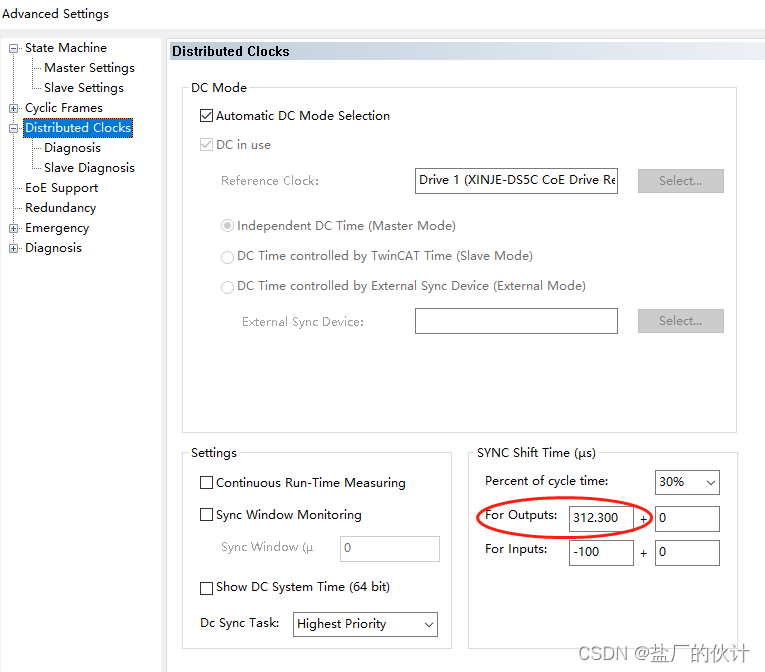
上图为TwinCAT上设置的偏移时间的接口
从站侧观察,在EtherCAT的DC模式下(同步模式),从站先使用PDI中断接收主站发来的数据(帧解析由ESC完成),然后在DC中断(一般sync0中断)处理数据,比如开关一个IO 或者写入指令到设备的控制环等等。这里的PDI和Sync0中断的间隔时间,就是所谓的偏移时间。

上图横轴为时间,纵轴为设备报文的位置
结合主站看(上图),主站定时发送数据帧,从站接收数据帧,距离越远的从站,接收到的数据帧的时间越晚,所以为了保证数据的同步,在数据帧和同步中断之间必须有足够的时间给从站接收和处理数据,这就是偏移时间的由来。像TwinCAT一般预留周期的30%的时间作为偏移时间,有些主站不能够设置这个偏移时间,比如基恩士和欧姆龙的PLC,就找不到对应的设置,理解为内部自动预留了一个偏移时间(用户无法设置)。
这篇关于EtherCAT偏移时间的理解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






