estimator专题

pytorch实现straight-through estimator(STE)
现在深度学习中一般我们学习的参数都是连续的,因为这样在反向传播的时候才可以对梯度进行更新。但是有的时候我们也会遇到参数是离>散的情况,这样就没有办法进行反向传播了,比如二值神经网络。本文中讲解了如何用pytorch对二值化的参数进行梯度更新的straight-through estimator算法。Question: STE核心的思想就是我们的参数初始化的时候就是float这样的连续值,当我们fo

使用estimator结构训练tf模型
一、使用estimator训练模型的流程 1、构建model_fn def my_metric_fn(labels, predictions):return {'accuracy': tf.metrics.accuracy(labels, predictions)}def model_fn(features, labels, mode, params):""" TODO: 模型函数必须有这四个

tf.estimator.train_and_evaluate() 训练与测试不一致
问题背景 以一个简单的分类任务为例,在处理完数据之后,使用如下code进行训练: estimator = tf.estimator.Estimator(model_fn, 'model', cfg, params)train_spec = tf.estimator.TrainSpec(input_fn=train_inpf, hooks=[])eval_spec = tf.estimato
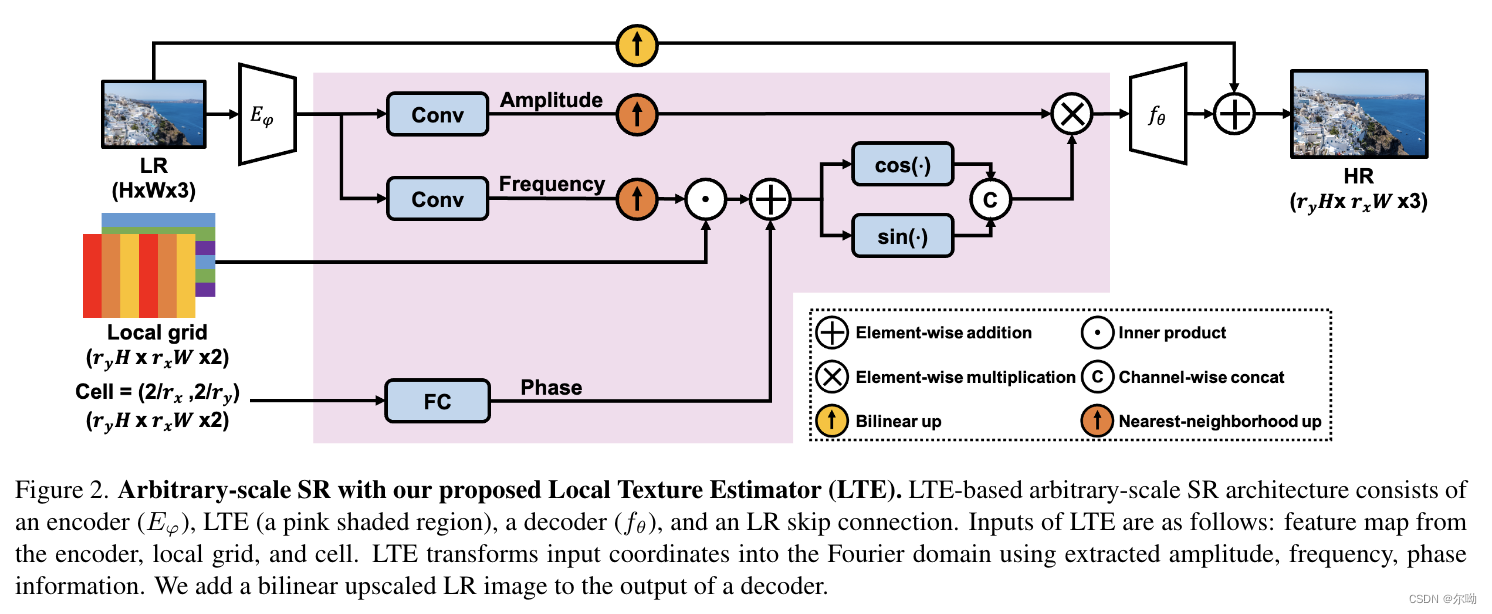
Local Texture Estimator for Implicit Representation Function
CVPR2022https://github.com/jaewon-lee-b/lte 问题引入 现在的任意超分辨率方法使用MLP模型,无法很好的生成高频信息,所以本文提出了一个模型来增加高频信息生成能力,也就是增加超分的细节信息,对应的问题是spectral bias problem;类似于NeRF输入不是直接坐标,而是进行了映射,本文将坐标输入之前也进行了映射; 方法: 整体概览:包含

Kaplan–Meier estimator 介绍
Kaplan–Meier estimator 介绍 本文主要便于自己理解推导,并不完善,参考如下资料: https://en.jinzhao.wiki/wiki/Kaplan%E2%80%93Meier_estimator 总的公式如下: 下面对这个公式进行解读: 首先定义一下问题: 问题的定义还是很清楚的。需要注意的是这里的生存函数S(t)是大于t的概率,而t我们这里当作是离散的。 对
Keras(十七)关于feature_column的使用、keras模型转tf.estimator
本文将介绍: 加载Titanic数据集使用feature_column做数据处理,并转化为tf.data.dataset类型数据keras_to_estimator 一,加载Titanic数据集 1,下载Titanic数据集,使用pandas读取并解析数据集 # 在如下的两个网址下载数据# https://storage.googleapis.com/tf-datasets/titani
VINS-MONO代码解读3----vins_estimator(鲁棒初始化部分)
文章目录 0. 前言1. 旋转约束标定旋转外参Rbc1.1 八点法求取relative pose1.2 **旋转约束和旋转residual的构建**1.3 **左乘右乘的构建**1.4 **系数矩阵A的构建**1.5 鲁棒核函数1.6 q c b q_{cb} qcb 的求解 2. initialStructure()2.1 check IMU可观性(激励是否足够)2.2 构建并求解gl
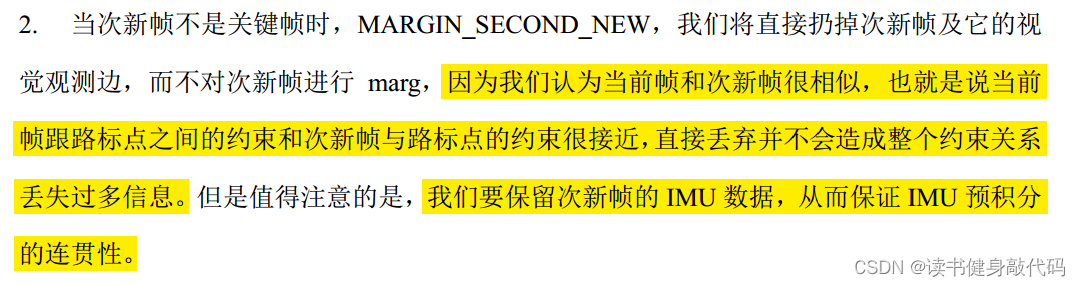
VINS-MONO代码解读5----vins_estimator(marginalization部分)
文章目录 0. 前言1.1 Marginalization Pipiline 1. marg factor构建1.1 变量及维度理解1.2 IMUFactor1.3 ProjectionTdFactor(ProjectionFactor)1.4 MarginalizationFactor( e p e_p ep推导更新,FEJ解决的问题)1.4.1 先验残差的更新1.4.2 先验Jacob

论文阅读:Iterative Denoiser and Noise Estimator for Self-Supervised Image Denoising
这篇论文是发表在 2023 ICCV 上的一篇工作,主要介绍利用自监督学习进行降噪的。 Abstract 随着深度学习工具的兴起,越来越多的图像降噪模型对降噪的效果变得更好。然而,这种效果的巨大进步都严重依赖大量的高质量的数据对,这种对大量训练的依赖,在真实环境中比较难获取,这在一定程度上限制了这些降噪模型的实际应用。为了克服对数据的依赖,很多研究者也开始探索自监督的学习方法,这类方法可以不依

ROS-3DSLAM(8):视觉部分visual_estimator第二节:initial 2
2021@SDUSC 2021年11月12日星期四——2021年11月13日星期六 一、背景简介: 结束了对于initial_alignment的初步阅读,下一步还要继续对于initial文件夹下的其他文件的分析,毕竟我们的最终目的还是对于函数esitimator中的的processImage()做分析。 这次的计划是针对Initial_ex_rotation和solve_5ph给出分析。
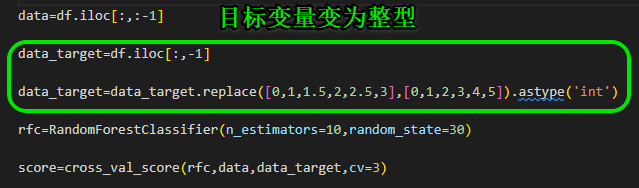
成功解决Fit Failed Warning: Estimator fit failed. The score on this train-test错误
成功解决Fit Failed Warning: Estimator fit failed. The score on this train-test错误 在利用sklearn进行随机森林分类时发生了Fit Failed Warning: Estimator fit failed. The score on this train-test错误,如下图所示: 经过查阅相关资料发现导致这一错误是因为

政安晨:示例演绎TensorFlow的官方指南(二){Estimator}
咱们接着演绎TensorFlow官方指南,我的这个系列的上一篇文章为: 政安晨:示例演绎TensorFlow的官方指南(一){基础知识}https://blog.csdn.net/snowdenkeke/article/details/136067030为什么要演绎官方指南,我在上一篇说过了,这次没有废话,直接开始。 Estimator介绍 政安晨: 咱们先看一下Estimator

TensorFlow之Estimator(三)详解
目录 1. Estimator初识 1.1 框架结构 1.2 Estimator优势 1.3 Estimator使用步骤 1.3.1 下面通过伪代码的形式介绍如何使用Estimator: 2. 深入理解Estimator 2.1 从源代码来理解Estimator 2.2 构建model_fn 2.3 Config 2.4 什么是tf.estimator.Estimato
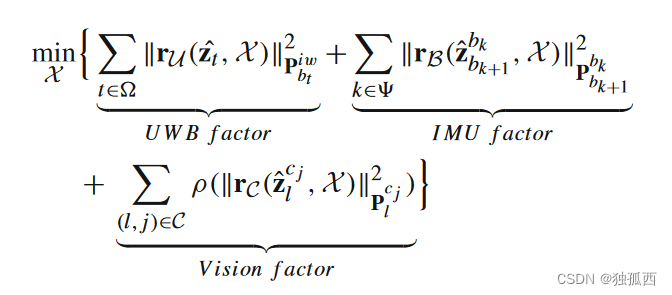
VIR-SLAM代码分析3——VIR_VINS详解之estimator.cpp/.h
前言 续接上一篇,本本篇接着介绍VIR-SLAM中estimator.cpp/.h文件的函数,尤其是和UWB相关的相比于VINS改动过的函数,仍然以具体功能情况+代码注释的形式进行介绍。 重点函数介绍 优化函数,代码是先优化,后边缘化。 void Estimator::optimization(){ceres::Problem problem;ceres::LossFunction *
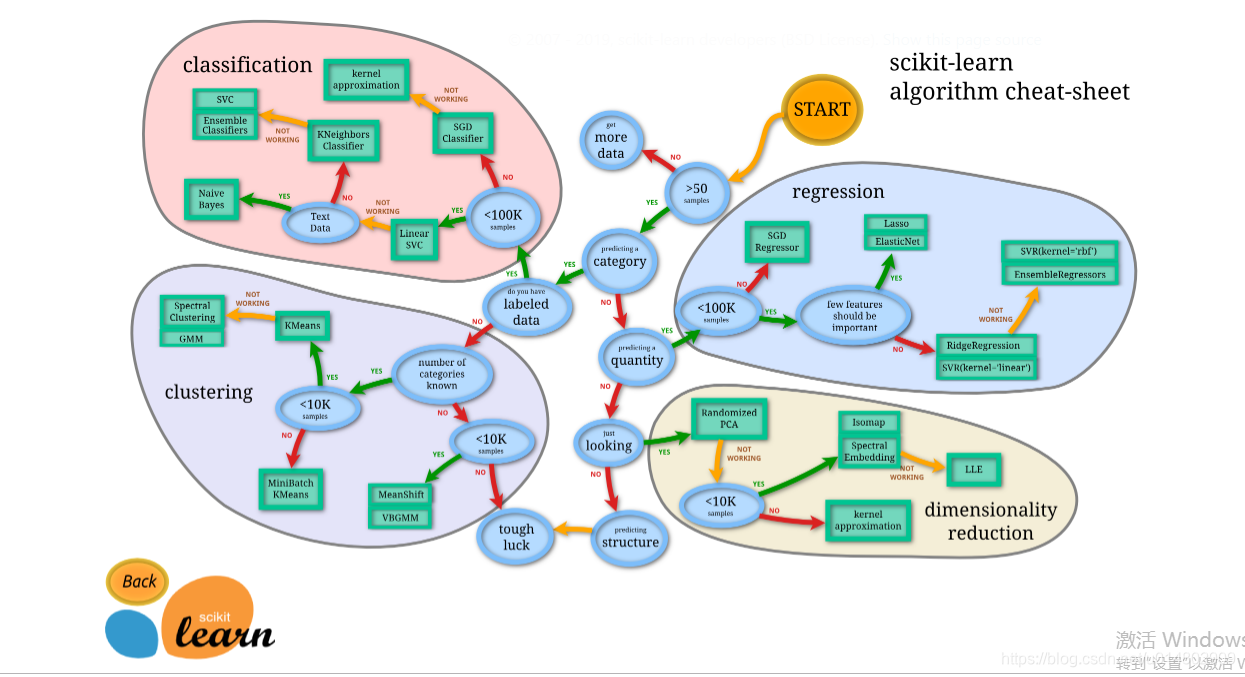
Choosing the right estimator
选择合适的估计器 不同的估算器更适合于不同类型的数据和不同问题。下面的流程图旨在为用户提供一些粗略的指导,指导他们如何处理有关哪些估算器尝试使用数据的问题。 http://scikit-learn.org/stable/tutorial/machine_learning_map/index.html 此笔记仅作为复习知识。

【VINS-Mono论文全文翻译】:VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator
文章目录 摘要一、引言二、相关工作三、概述四、数据预处理A.视觉处理前端B.IMU预积分 五、估计器初始化(松耦合初始化提供优化初始值和状态)A.滑动窗口(Sliding Window)纯视觉SfMB.视觉惯性联合校准 六、紧耦合单目VIOA.公式B.IMU测量残差C.视觉测量残差(视觉重投影误差部分)D.边缘化E.摄像机速率状态估计的纯运动视觉惯性BAF.IMU前向传递以达到IMU速率状态