ego专题

EGO下拉更新是没有网络连接问题解决
首先我的程序下拉更新是在有网络的状况下,每下拉一次就去网络请求一次,而不是读取更多已有的数据。 这样遇到的问题是,下拉更新的那么view,一直停留在table的最上端。 然后改成 按照我的思路,[self.performSelector:@selector(doneLoadingTableViewData)] 会移除掉下拉更新的那个view 但是问题一
Linux 35.5 + JetPack v5.1.3@ego-planner-swarm编译安装
Linux 35.5 + JetPack v5.1.3@ego-planner-swarm编译安装 1. 源由2. 编译&安装Step 1:依赖库安装Step 2:建立工程Step 3:编译工程Step 4:安装工程 3. 问题汇总3.1 组件ros-noetic-roslint问题3.2 uav_simulator/local_sensing - CUDA优化3.3 编译命令`catkin

Meta 推出Ego-Exo4D:一个研究视频学习和多模态感知的基础数据集
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领域的领跑者。点击订阅,与未来同行! 订阅:https://rengongzhineng.io/ 最近,科技圈迎来了一则令人兴奋的消息——Ego-Exo4D数据集终于全面
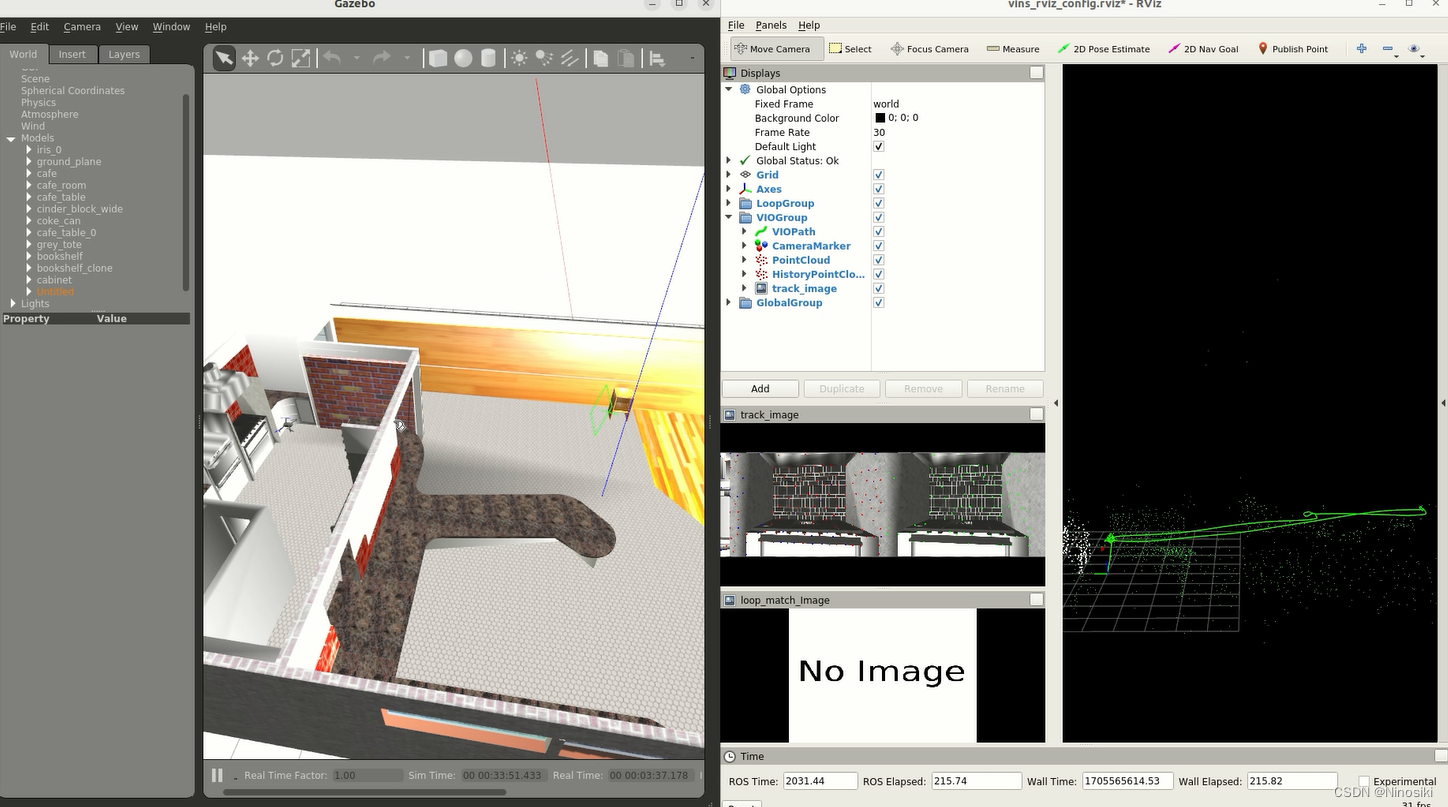
一、基于xtdrone的仿真无人机学习:定点飞行 (用ego_planner
参考三维运动规划 · 语雀 零·基础知识 MAVROS(MAVLink to ROS)是一个ROS(Robot Operating System)节点,用于在ROS系统中与PX4飞控系统进行通信。 它通过将MAVLink消息转换为ROS消息,实现了ROS系统与无人机之间的数据交换和控制。 在PX4 SITL(Software-in-the-Loop)仿真环境中,无人机模型通过PX4飞控

EGO-Swarm代码解读-地图部分
文章目录 1、参数解读2、主要函数解读 1、参数解读 一、MappingData md_中的参数含义: local_bound_min_, local_bound_max_ //更新栅格的范围 //具体占据概率,初始化为-1.99243-0.01=-2.00243(空闲)md_.occupancy_buffer_ = vector<double>(buffer_si
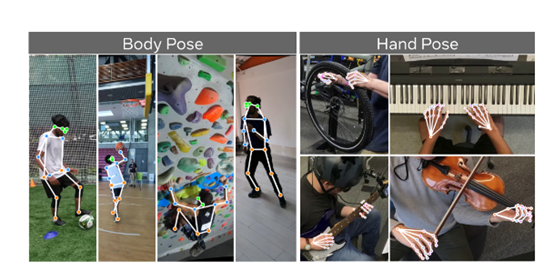
Meta开源最大多模态视频数据集—Ego-Exo4D
社交、科技巨头Meta联合15所大学的研究机构,经过两年多的努力发布了首个多模态视频训练数据集和基础套件Ego-Exo4D,用于训练和研究AI大模型。 据悉,该数据集收集了来自13个城市839名参与者的视频,总时长超过1400小时,包含舞蹈、足球、篮球、攀岩、音乐、烹饪、自行车维修等8大类,131个复杂场景动作。这使得AI模型更好地理解人类的行为,有助于开发出更强大的多模态大模型。 E
Meta开源最大多模态视频数据集—Ego-Exo4D
社交、科技巨头Meta联合15所大学的研究机构,经过两年多的努力发布了首个多模态视频训练数据集和基础套件Ego-Exo4D,用于训练和研究AI大模型。 据悉,该数据集收集了来自13个城市839名参与者的视频,总时长超过1400小时,包含舞蹈、足球、篮球、攀岩、音乐、烹饪、自行车维修等8大类,131个复杂场景动作。这使得AI模型更好地理解人类的行为,有助于开发出更强大的多模态大模型。 E

中美国际青少年AI-Ego人工智能无人车(硅谷站)大赛
硅谷Live / 实地探访 / 热点探秘 / 深度探讨 比赛时间:2019年7月30日 比赛地点:硅谷(斯坦福大学) 比赛主题:AI-Ego人工智能无人车大赛硅谷站 参赛对象:中美学生 美国时间2019年7月30日,由捷思国际教育集团主办的第二届中美国际青少年AI-Ego人工智能无人车大赛硅谷站在美国斯坦福大学顺利举行。距离此前举办的第一届中美国际青少年AI-Ego人工智能无人车大赛北

集群路径规划学习(一)之EGO-swarm仿真
代码调试与编译 源代码下载 https://github.com/ZJU-FAST-Lab/ego-planner-swarm/tree/master 按照代码要求配置安装环境 sudo apt-get install libarmadillo-dev 文件对应拷贝与调整 新建工作空间文件夹 XF_EGOworkspace 新建src 在src文件夹下开启终端,输入:


EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors(论文笔记)
EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors(论文笔记) ESDF欧式符号距离场避碰力估算基于梯度的轨迹优化平滑惩罚障碍惩罚可行性的惩罚数值优化 传统上,基于梯度的规划器依赖于预先构建的ESDF地图来评估梯度大小和方向,并使用数值优化来生成局部最优解。尽管优化程序收敛速度快,但由于预先构

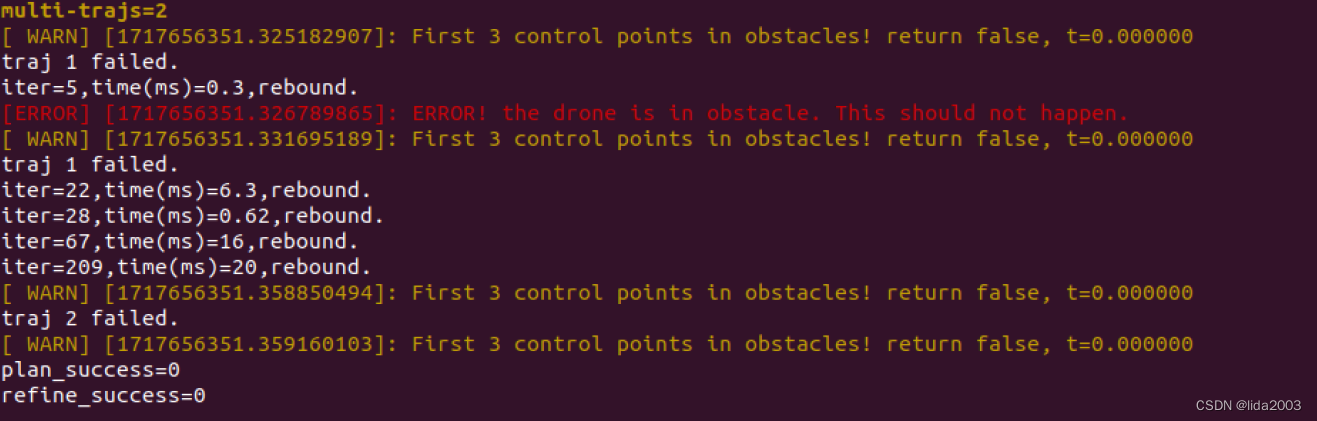
Jetson Orin NX 开发指南(7): EGO-Swarm 的编译与运行
一、前言 EGO-Planner 浙江大学 FAST-LAB 实验室的开源轨迹规划算法是,受到 IEEE Spectrum 等知名科技媒体的报道,其理论技术较为前沿,是一种不依赖于ESDF,基于B样条的规划算法,并且规划成功率、算法消耗时间、代价数值等性能方面都要高于其他几种知名算法。 而 EGO-Swarm 是基于 EGO-Planner 拓展的去中心化的无人机集群算法,有助于智能小车或自主