depth专题

【CSS in Depth 2 精译_023】第四章概述 + 4.1 Flexbox 布局的基本原理
当前内容所在位置(可进入专栏查看其他译好的章节内容) 第一章 层叠、优先级与继承(已完结) 1.1 层叠1.2 继承1.3 特殊值1.4 简写属性1.5 CSS 渐进式增强技术1.6 本章小结 第二章 相对单位(已完结) 2.1 相对单位的威力2.2 em 与 rem2.3 告别像素思维2.4 视口的相对单位2.5 无单位的数值与行高2.6 自定义属性2.7 本章小结 第三章 文档流与盒模型(已

【CSS in Depth 2 精译_024】4.2 弹性子元素的大小
当前内容所在位置(可进入专栏查看其他译好的章节内容) 第一章 层叠、优先级与继承(已完结) 1.1 层叠1.2 继承1.3 特殊值1.4 简写属性1.5 CSS 渐进式增强技术1.6 本章小结 第二章 相对单位(已完结) 2.1 相对单位的威力2.2 em 与 rem2.3 告别像素思维2.4 视口的相对单位2.5 无单位的数值与行高2.6 自定义属性2.7 本章小结 第三章 文档流与盒模型(已

Maximum Depth of N-ary Tree
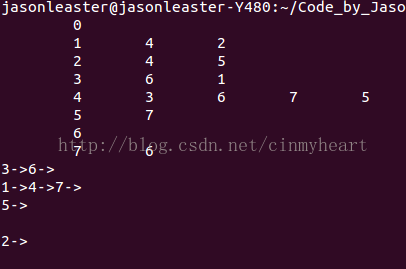
Input: root = [1,null,2,3,4,5,null,null,6,7,null,8,null,9,10,null,null,11,null,12,null,13,null,null,14]Output: 5 思路1:DFS ,divide and conquer /*// Definition for a Node.class Node {public int v

leetcode104 Maximum Depth Of Binary Java
Given a binary tree, find its maximum depth. The maximum depth is the number of nodes along the longest path from the root node down to the farthest leaf node. 1、递归解法。两行 public int maxDept

leetcode 刷题之路 40 Minimum Depth of Binary Tree
Given a binary tree, find its minimum depth. The minimum depth is the number of nodes along the shortest path from the root node down to the nearest leaf node. 求二叉树的最小深度,最小深度定义为从根节点到最近的叶子节点经过的节点个

【CVPR‘24】深度补全:Flexible Depth Completion for Sparse and Varying Point Densities
【CVPR'24】深度补全:Flexible Depth Completion for Sparse and Varying Point Densities 摘要1. 引言3. 方法3.1 基础深度估计架构3.2 基于亲和度的偏移校正3.3 校正置信度预测3.4 联合深度估计与完成3.5 损失 4. 实验4.1 数据集和评估指标4.2 实验概述4.3 消融研究 参考文献 摘要
【综述】 从稀疏的数据中进行深度补全:Deep Depth Completion from Extremely Sparse Data: A Survey
【综述】 从稀疏的数据中进行深度补全:Deep Depth Completion from Extremely Sparse Data: A Survey 占坑,3日内更新

【CSS in Depth 2 精译_021】3.4 负的外边距 + 3.5 外边距折叠
当前内容所在位置(可进入专栏查看其他译好的章节内容) 第一章 层叠、优先级与继承(已完结) 1.1 层叠1.2 继承1.3 特殊值1.4 简写属性1.5 CSS 渐进式增强技术1.6 本章小结 第二章 相对单位(已完结) 2.1 相对单位的威力2.2 em 与 rem2.3 告别像素思维2.4 视口的相对单位2.5 无单位的数值与行高2.6 自定义属性2.7 本章小结 第三章 文档流与盒模型 3
生信技能57 - Samtools获取指定外显子区域depth和提取BAM文件序列
1. Samtools depth 根据指定bed文件,获取指定区域的覆盖度信息。 # 提取IDT xGen V1 HBA1 exon bedcat xgen-exome-hyb-panel-v1-targets-hg19.bed|grep -w HBA1 > hba.exon.bed# 提取HBA1 外显子的覆盖度# -b: 提取depth的bed文件samtools depth -b

Depth Anything V2:抖音开源高性能任何单目图像深度估计V2版本,并开放具有精确注释和多样化场景的多功能评估基准
📜文献卡 题目: Depth Anything V2作者: Lihe Yang; Bingyi Kang; Zilong Huang; Zhen Zhao; Xiaogang Xu; Jiashi Feng; Hengshuang ZhaoDOI: 10.48550/arXiv.2406.09414摘要: This work presents Depth Anything V2. With

Reconstructing Position From Depth
需求: 根据当前像素的Depth计算出其View空间的Position 先说一种惯性思维的方法: 既然知道depth是怎么算出来的, 那么进行逆运算回去不就得到position了? 先说说depth是怎么出来的: Vertex shader: output.position = mul(input.postion, matWorldViewProject); output.depth

论文阅读笔记——StereoNet: Guided Hierarchical Renement for Real-Time Edge-Aware Depth Prediction
引言: 谷歌实时端到端双目系统深度学习网络 双目匹配可以得到环境中的三维深度信息,进而为机器人,无人车,VR等现实场景下的应用提供有力信息,在对安全验证比较高的人脸支付领域,三维人脸验证也正在逐渐取代安全性较低的二维人脸验证。近年来,深度学习双目系统匹配已经取得了很不错的进展,很多先进的网络性能已经超过传统方法。然而,深度学习双目系统匹配仍然在实用方面面临很多问题,其中一个问题便是无法做到推断
leetcode No104. Maximum Depth of Binary Tree
Question: Given a binary tree, find its maximum depth. The maximum depth is the number of nodes along the longest path from the root node down to the farthest leaf node. 找二叉树的最大深度 Algorithm:

Tree-DFS(Depth-First-Search)
DFS-Depth First Search-深度优先搜索 对于一颗二叉树,深度优先搜索(Depth First Search)是沿着树的深度遍历树的结点,尽可能深的搜索数的分支。先访问根结点,然后遍历左子树接着是遍历右子树。 Ex:DFS遍历顺序为ABDCEF 我们可以用栈来实现它,栈-先进后出(first in last out),C++有栈的模版库。
DFS --- Depth First Search 深度优先搜索算法
Depth First Search 原理还是去看《DSAA》,这里着重分析实现策略。 如果对于图这种数据结构不熟悉,这个BFS一般是搞不定的... 下面分别是无向图的邻接表实现和邻接矩阵实现 http://blog.csdn.net/cinmyheart/article/details/41381845
git clone 文件大,depth=1了解
最近比较清闲哈~ 检查检查Android项目完成情况吧,clone项目漫长的等待,项目文件小2G -_-!!! 对于临时clone项目这是个灾难呀 那么问题来了,如何clone一个轻量级的呢? 查到一个命令 --depth https://git-scm.com/docs/git-clone –depth < depth > Create a shallow clone with a
LeetCode 题解(12):Maximum Depth of Binary Tree
题目: Given a binary tree, find its maximum depth. The maximum depth is the number of nodes along the longest path from the root node down to the farthest leaf node. 题解: 基础中的基础。 /*** Definition
git clone --depth=1
情况一:git clone git clone https://github.com/labuladong/fucking-algorithm 使用git可视化命令git log --graph --oneline --all,查看仓库的所有历史提交记录(我这里用alias取了别名glog) 说明:一般仓库文件不大时,我们都可以用这个方法git clone仓库,但问题是有时候,在仓库历史的某次c
Leetcode: Minimum Depth of Binary Tree
题目: Given a binary tree, find its minimum depth. The minimum depth is the number of nodes along the shortest path from the root node down to the nearest leaf node. 思路分析: 求二叉树的最小深度。二叉树多用迭代。 C++示例代
Leetcode----104. Maximum Depth of Binary Tree(easy)
题目:点击打开链接 Python 版一: # Definition for a binary tree node.# class TreeNode(object):# def __init__(self, x):# self.val = x# self.left = None# self.right = Nonecla
97.Maximum Depth of Binary Tree-二叉树的最大深度(容易题)
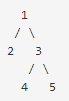
二叉树的最大深度 题目 给定一个二叉树,找出其最大深度。 二叉树的深度为根节点到最远叶子节点的距离。样例 给出一棵如下的二叉树: 这个二叉树的最大深度为3.题解 递归法 /*** Definition of TreeNode:* public class TreeNode {* public int val;* public TreeNode left, right
LeetCode--111. Minimum Depth of Binary Tree
题目链接:https://leetcode.com/problems/minimum-depth-of-binary-tree/ 求树的最小深度,也就是说:沿着树的路径从根节点到最近叶节点的距离。 需要一个队列进行层次遍历(BFS,对层次进行计数),在某一层找到叶节点时返回。 class Solution {public static int minDepth(TreeNode root)
Depth maps转点云
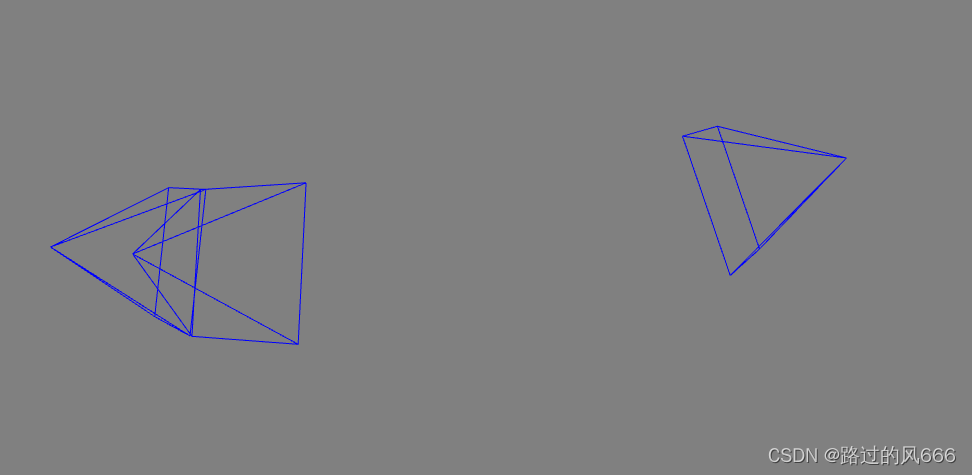
前言 本文主要记录一下如何可视化相机位姿,如何用Blender得到的深度图反投影到3D空间,得到相应的点云。 Refernce https://github.com/colmap/colmap/issues/1106 https://github.com/IntelRealSense/librealsense/issues/12090 https://medium.com/yodayod

论文阅读:AdaBins: Depth Estimation using Adaptive Bins
Motivation 信息的全局处理会帮助提高整体深度估计。提出的AdaBins预测的bin中心集中在较小的深度值附近,对于深度值范围更广的图像,分布广泛。Fu et al. 发现将深度回归任务转化为分类任务可以提升效果,将深度范围分成固定数量的bins。本文则解决了原始方法的多个限制: 计算根据输入场景的特征动态变化的自适应箱。分类方法导致深度值的离散化,导致视觉质量差,深度不连续明显,论文提
SDXL_webUI_controlnet使用depth_zoe错误解决
diffusers/controlnet-zoe-depth-sdxl-1.0 RuntimeError: Error(s) in loading state_dict for ZoeDepth:Unexpected key(s) in state_dict: 解决措施: Installing the right version of timm did the trick for me p

图解TensorFlow op:tf.nn.space_to_depth
田海立@CSDN 2020-10-20 TensorFlow算子space_to_depth是depth_to_space的逆操作。本文用图文的方式来解释该算子运算的方式。 一、space_to_depth原型 space_to_depth是把space数据(width和height维)移到depth(Channel)维上,与depth_to_space刚好是反向的操作。对应到ML该操