colcon专题

ROS2 -Windows编译ros2包(colcon)
步骤 1 在windows上安装ROS2 FOXY。 参考:windows安装ros 安装时将对应版本名改为foxy即可。安装时最好保证已经安装了chocolatey和visual studio. 快速安装chocolatey: Set-ExecutionPolicy Bypass -Scope Process -Force; [System.Net.ServicePointManager
机器人操作系统ROS2学习—编译工作空间colcon build报错问题
在ROS2中,工作空间创建完成后,会经常需要编译工作空间。在工作空间dev_ws 下打开一个终端,通过指令Colcon build来编译工作空间。 1、这个过程有可能会出现如下错误: "colconbuild:Duplicate package names not supported" 根据错误分析,出现了两个命名相同的功能包learning-pkg_c 和learning-p

ROS 2 index翻译(七)——用Colcon编译功能包(package)
这是一个用colcon如何创建和编译ROS工作区的简要教程。这是一个实用的教程,并非来替代核心文档。ROS 2 在Bouncy之前的发行版,使用的编译工具是ament_tools,这在ament教程中有阐述。 1. 背景colcon是ROS编译工具catkin_make,catkin_make_isolated,catkin_tools和ament_tools的换代。有关colcon设计的更多信

ROS 2编写包并用colcon编译
第一步,创建工作空间 使用如下命令: mkdir -p ~/ros2_ws/srccd ~/ros2_ws/src 然后使用pkg命令创建一个新的包(package): ros2 pkg create test # test是package的名称cd test/src 执行完毕后,目录下多了一个test文件夹。打开test文件夹,里面有: ①include文件夹——这是用来存放头
ROS知识4:Colcon
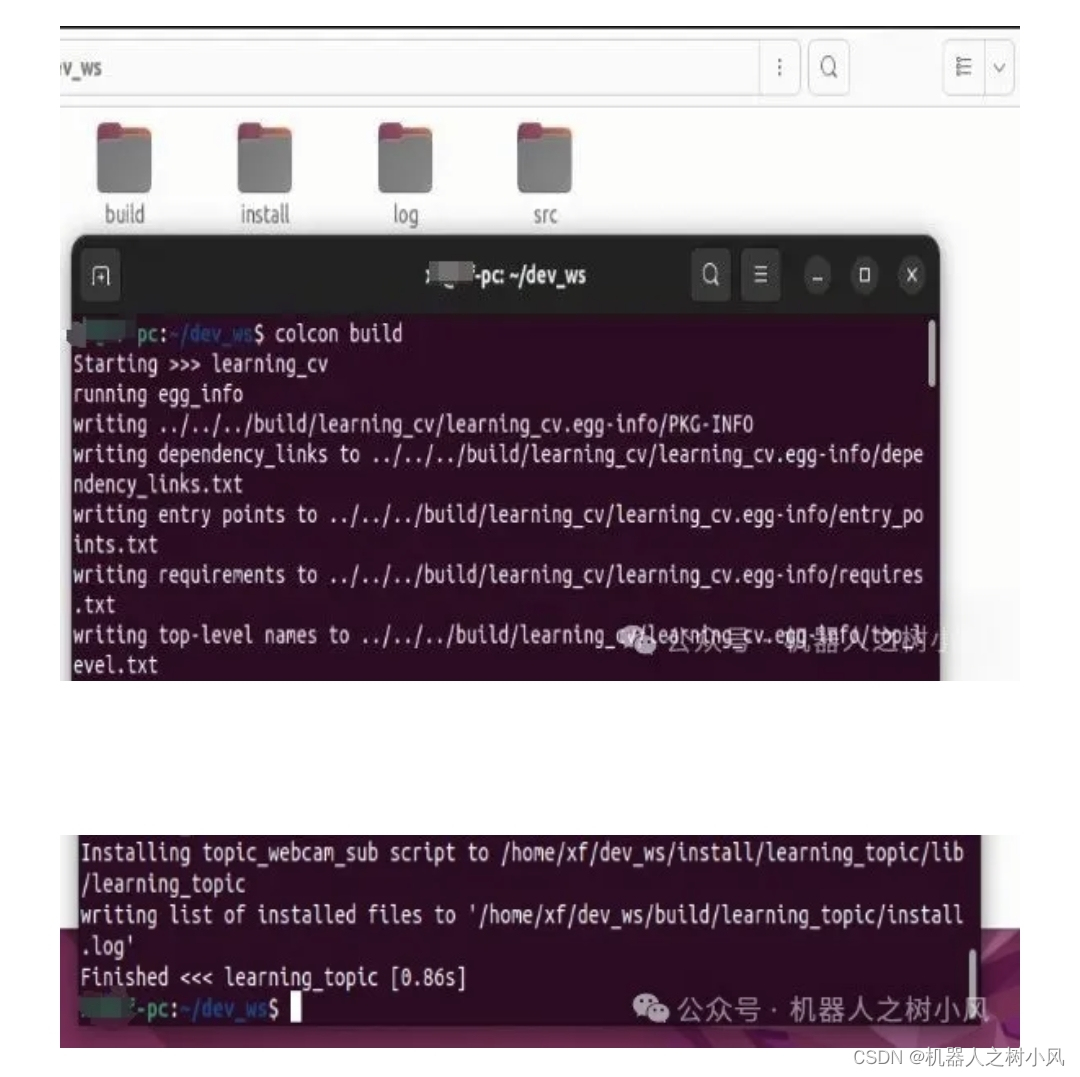
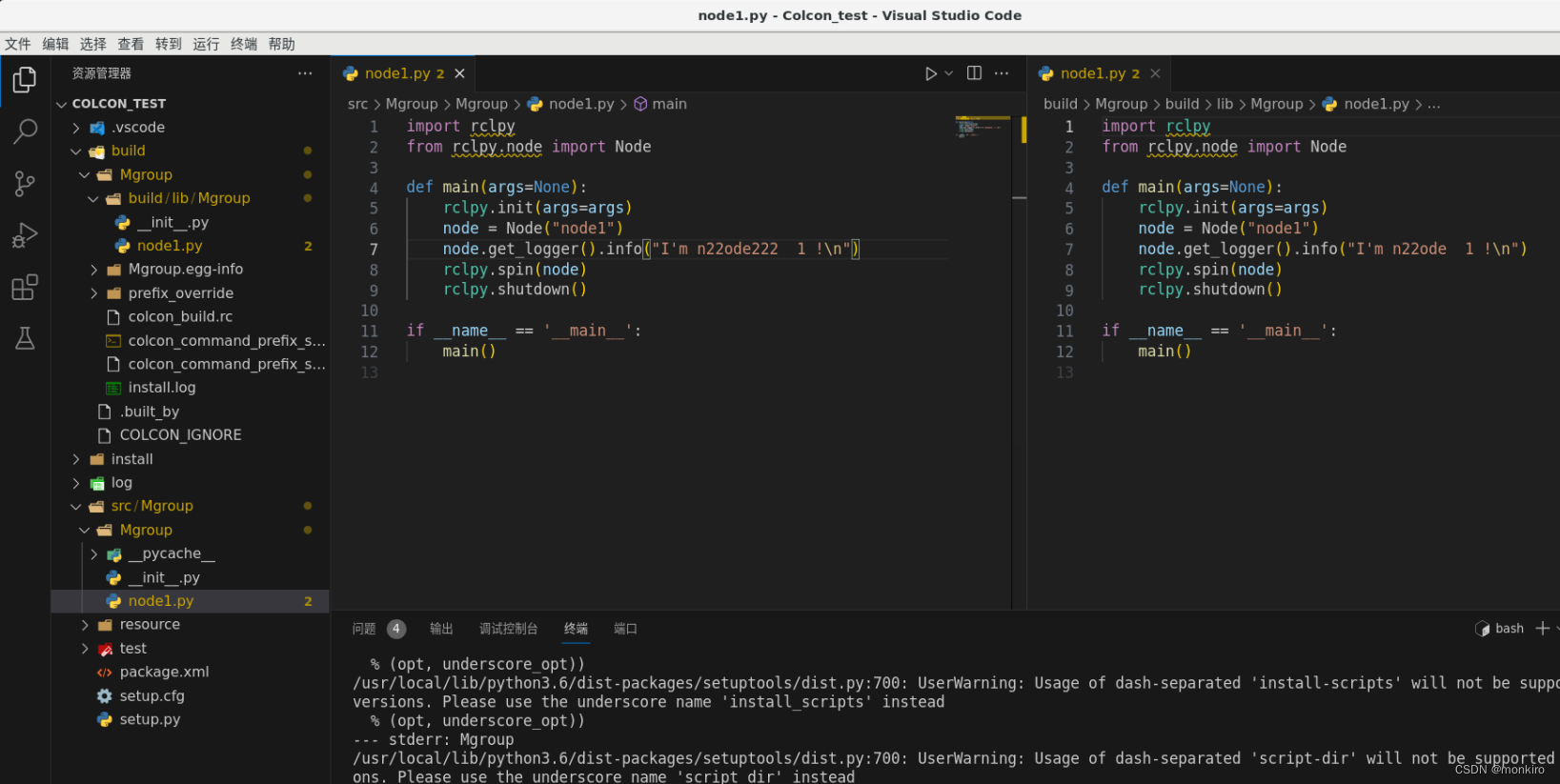
ROS知识4:Colcon 本文目的前置知识点运行环境文章参考指路Colcon软件简介Colcon安装和使用教程1. 安装Colcon2. 使用Colcon编译一个python代码编写的节点,然后运行2.1 创建工作空间和功能包2.1.1创建功能包2.1.2创建节点文件 2.2 Colcon编译功能包2.3 运行功能包的功能 Colcon常用命令参考资料 本文目的 简单的介绍一
colcon build --symlink-install ros2_example_ws 出错
用colcon去build packages,出现下面的错误: sph@sph-System-Product-Name:~/Documents/ros2_example_ws$ colcon build --symlink-installStarting >>> examples_rclcpp_minimal_action_clientStarting >>> examples_rclcpp
ROS2使用colcon build编译的工程运行出错,cmake编译的没有问题。
ROS2下的工程编译后, 用标准的ros2的运行节点命令无法正常运行,程序没有问题。 ros2 run package_name exc_file build下生成的可执行文件可以用 ./ exc_file 执行, install下的可执行文件用 ./ exc_file无法运行 解决方法: colcon build --symlink-install

解决ROS2报错colcon build: Duplicate package names not supported
执行colcon build命令错:ERROR:colcon:colcon build: Duplicate package names not supported。 解决办法:按照提示在src目录下删除多余的目录;