本文主要是介绍ROS 2编写包并用colcon编译,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
第一步,创建工作空间
使用如下命令:
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src然后使用pkg命令创建一个新的包(package):
ros2 pkg create test # test是package的名称
cd test/src执行完毕后,目录下多了一个test文件夹。打开test文件夹,里面有:
①include文件夹——这是用来存放头文件的;
②src文件夹——用来存放源文件;
③CMakeLists.txt——该文件是CMake工程的配置文件,ROS工程本质上是一个CMake工程;
④package.xml——该文件是package的配置文件。
关于③和④两个配置文件,可参考博文:https://blog.csdn.net/NNNNNNNNNNNNY/article/details/75213621
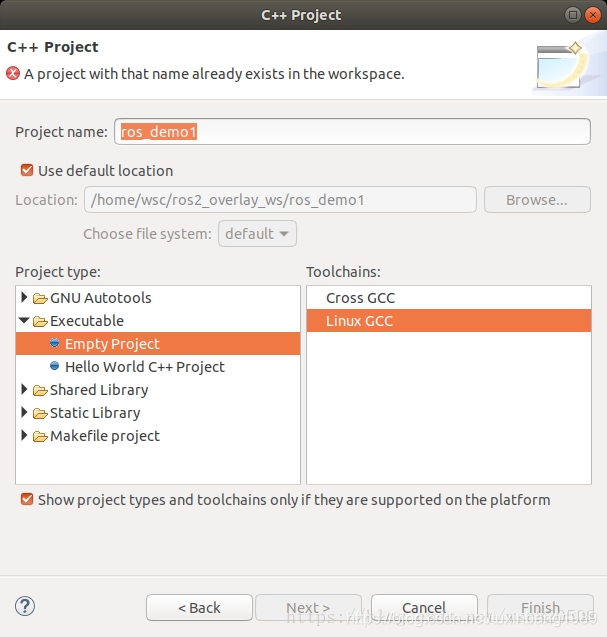
第二步,利用Eclipse编写源文件
2.1创建 Eclipse C++ 工作空间
自己编写的包放在/home/wsc/ros2_overlay_ws上,包的名称为ros_demo1。
2.2 通过ROS2指令创建包
ROS2 pkg create ros_demo1这样在ros2_overlay_ws中就会出现几个与ros2包相关的文件夹——build和install:
①build文件夹放置了很多编译过程中的中间文件;
②install文件夹是最终编译生成的可执行文件、库文件和环境变量等,当然这里的是局部环境变量。
2.3 通过ROS2指令编译包
虽然没有源文件,但依然可以用下面的指令进行编译:
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Debug编译之后,又会在ros2_demo1文件夹下出现几个新的文件和文件夹。
2.4 在Eclipse中刷新C++ project
刷新之后,在Eclipse project explore中会出现上述新增的文件和文件夹。includes里是头文件路径,需要链接到ROS2源码包中的include;src目录(wsc_demo2除外)是从ROS2的 安装目录中的src(用命令行工具编译成功后)拷贝过来的,因为在开发自己的ROS2包时,代码提示、自动补全时需要相关头文件的支持,也可以在IDE 相关设置中直接添加ROS2安装目录中的头文件(/include文件夹)包含路径,但是文件太多添加麻烦,所以干脆都拷贝过来。(可能会有更好的办法)
第三步,配置CMakeLists.txt和package.xml
这是一篇关于这两个文件详细介绍的博文:https://blog.csdn.net/NNNNNNNNNNNNY/article/details/75213621
在这两个文件中,一定要指明自己创建的软件包源码中包含的ROS 2源码头文件和其他依赖包的头文件,否则编译时会报错。
这需要对包进行配置,假设包A_package需要引用B_package(与A同一个工作空间)的头文件(例如由message,srv,action自动生成的头文件)。步骤如下:
在A包中源文件需要有一下预处理:
#include <B_package/xxx.h>1.在A_package包的package.xml中添加编译和运行的依赖库,如下:
<build_depend>B_package</build_depend>
<run_depend>B_package</run_depend>2.在A_package包的CMakeList.txt中的find_package添加B_package如下:
find_package(colcon REQUIRED COMPONENTS roscpp rospy std_msgs B_package )3.在A_package包的CMakeList.txt中的include_directories添加${colcon_INCLUDE_DIRS}如下:
include_directories(include ${colcon_INCLUDE_DIRS})
参考博客:https://blog.csdn.net/wsc820508/article/details/81388817
这篇关于ROS 2编写包并用colcon编译的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






