本文主要是介绍机器人操作系统ROS2学习—编译工作空间colcon build报错问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在ROS2中,工作空间创建完成后,会经常需要编译工作空间。在工作空间dev_ws 下打开一个终端,通过指令Colcon build来编译工作空间。
1、这个过程有可能会出现如下错误: "colconbuild:Duplicate package names not supported"
根据错误分析,出现了两个命名相同的功能包learning-pkg_c 和learning-pkg_python。
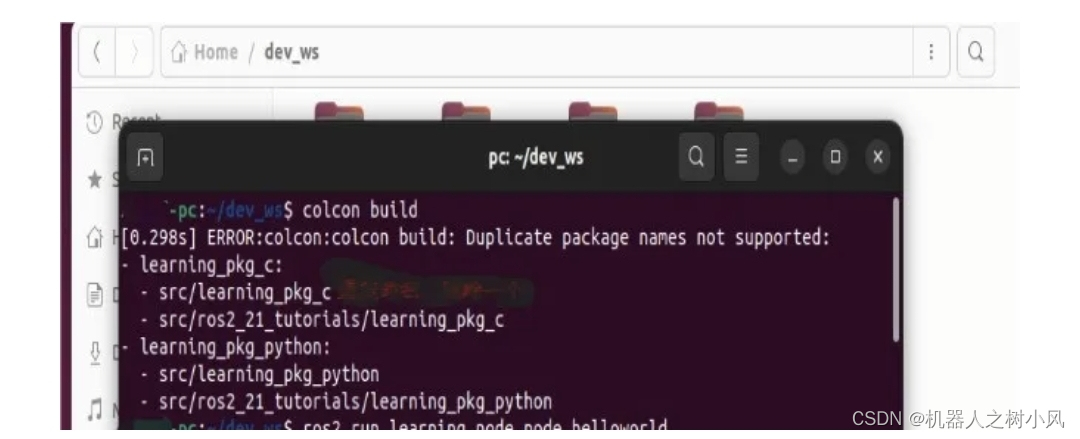
通过删除一个相同的功能包即可消除错误信息,例如删除src文件夹下的learning_pkg_C 和learning_pkg-python功能包。
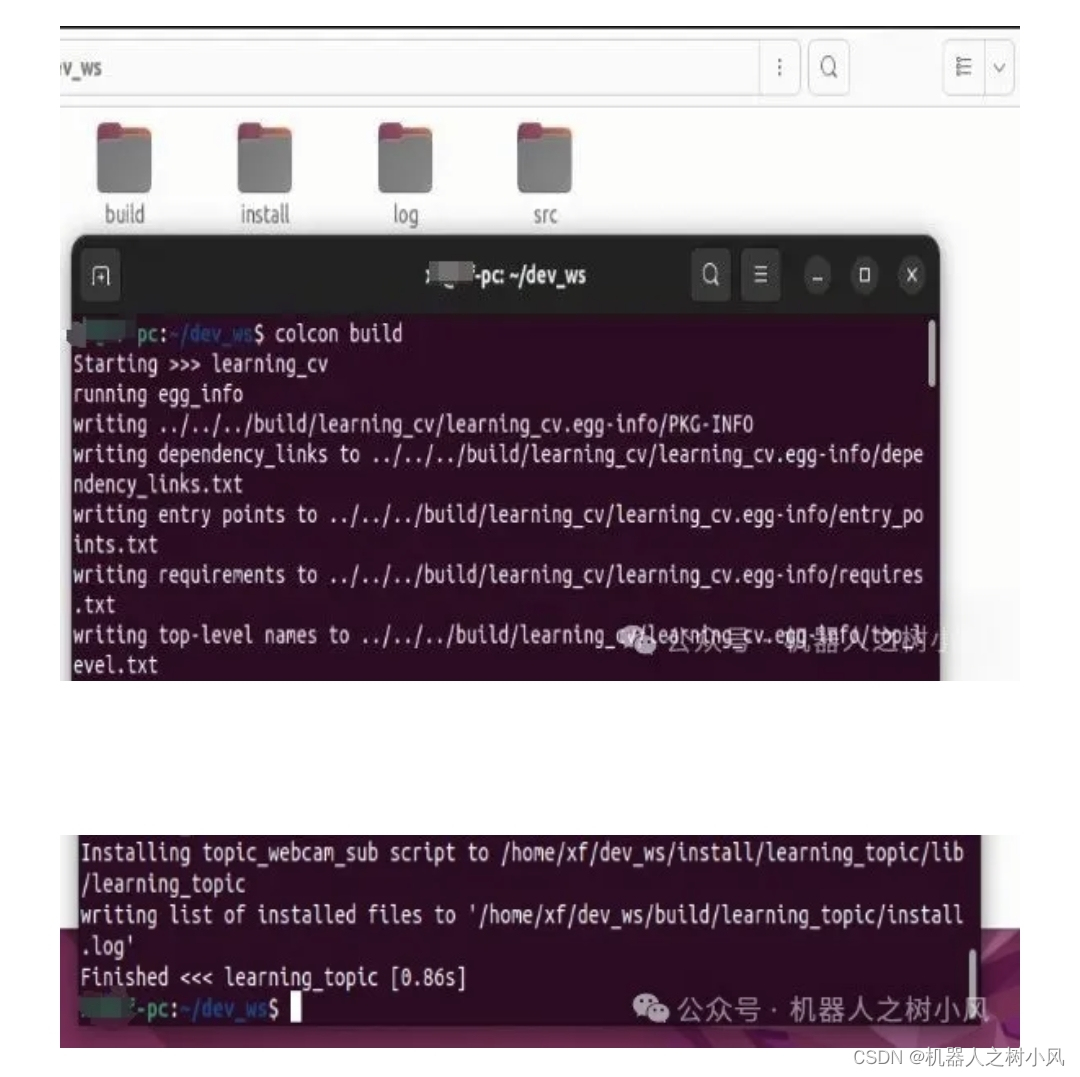
再次通过指令colcon build编译,就可以了。编译的过程需要点时间,以下是编译开始和结束的两张图片,表示编译完成。
2、每次改完程序后,也需要重新编译工作空间,以刷新保存程序,保证ROS2再次运行程序时不会报错。
在同名工忠号上会发布更多关于ROS2的内容。
这篇关于机器人操作系统ROS2学习—编译工作空间colcon build报错问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








