calibration专题
![【课程笔记】谭平计算机视觉(Computer Vision)[4]:辐射校准高动态范围图像 - Radiometric Calibration HDR](https://i-blog.csdnimg.cn/blog_migrate/7972a564ea1c037d7366163813d67ddb.png)
【课程笔记】谭平计算机视觉(Computer Vision)[4]:辐射校准高动态范围图像 - Radiometric Calibration HDR
视频地址链接 预备知识 radiance:单位面积单位时间单位方向角发出去的能量 irradiance:单位:功率/平方米;单位面积单位时间接收的能量 ISP: image signal processor 白平衡:人眼会自动滤过白炽灯、日光灯、节能灯下对物体的附加颜色,然而相机没有此功能,因此相机具有矫正功能。 vignetting:对于白墙拍照,一般是中间亮周边暗。边缘上光线散开的效果,

六. 部署分类器-int8-calibration
目录 前言0. 简述1. 案例运行2. 补充说明3. 代码分析3.1 main.cpp3.2 trt_model.cpp3.3 trt_calibrator.hpp3.4 trt_calibrator.cpp 4. 校准精度影响因素结语下载链接参考 前言 自动驾驶之心推出的 《CUDA与TensorRT部署实战课程》,链接。记录下个人学习笔记,仅供自己参考 本次课程我们来学习

使用Camera Calibration Toolbox for Matlab进行摄像机标定
Camera Calibration Toolbox for Matlab: http://www.vision.caltech.edu/bouguetj/calib_doc/ 一些摄像机标定的Matlab工具箱(含Kinect和激光):http://blog.exbot.net/archives/60 kinect深度图与摄像头RGB的标定与配准:http://m.blog.csdn

r3live 使用前提 雷达-相机外参标定 livox_camera_lidar_calibration
标定的是相机到雷达的,R3live下面配置的雷达到相机的,所以要把得到外参旋转矩阵求逆,再填入,平移矩阵则取负 港科大livox_camera_calib虽然操作方便,但是使用mid360雷达会有视角问题(投影三维点到相机),尝试了很多场景,标定效果都不理想(推荐场景是楼梯间),看来港大的更适合avia之类窄角度的雷达。livox_camera_lidar_calibration标定效果还不错,但

摄像机标定03_标定过程(Camera Calibration)
摄像机标定过程 为了进行摄像机标定,必须已知世界坐标系中足够多三维空间点的坐标,找到这些点在图像中的投影的二维图像坐标,并建立对应关系。 平面标定板的几大优势:非常易于操作;可以制作的非常精确;可以方便用在背光照明的应用上,只需要使用透明材料制作放置标志点的底盘即可。 将标定标记在世界坐标系中的坐标记为 Mi M_{i},将标定标记中心点投影到图像坐标系的坐标记为 mi m_{i},将摄像
代码+视频,手动绘制logistic回归预测模型校准曲线(Calibration curve)(1)
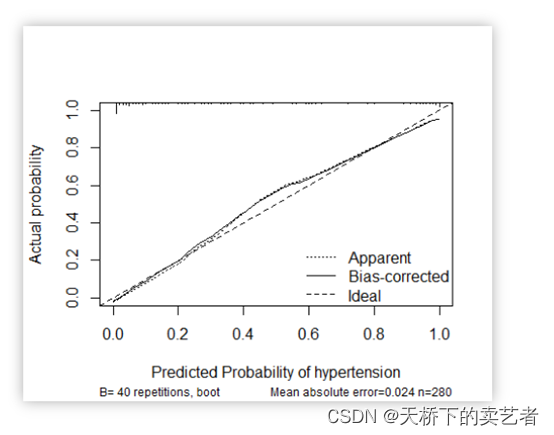
校准曲线图表示的是预测值和实际值的差距,作为预测模型的重要部分,目前很多函数能绘制校准曲线。 一般分为两种,一种是通过Hosmer-Lemeshow检验,把P值分为10等分,求出每等分的预测值和实际值的差距. 另外一种是calibration函数重抽样绘制连续的校准图 今天我们来视频演示第一种,手动绘制的好处在于加深你对绘图的理解,而且能个性化的进一步处理图形。第一种绘图本质就是我们的折线
【雷达相机外参标定】direct_visual_lidar_calibration安装
direct_visual_lidar_calibration安装 主页安装ubuntupclOpenCVceres其他依赖fmtdirect_visual_lidar_calibration 标定雷达和相机时使用direct_visual_lidar_calibration。 主页 https://github.com/koide3/direct_visual_lidar_

《Improving Calibration for Long-Tailed Recognition》阅读笔记
论文标题 《Improving Calibration for Long-Tailed Recognition》 改进长尾识别的校准工作 作者 Zhisheng Zhong、 Jiequan Cui、Shu Liu 和 Jiaya Jia 香港中文大学和 SmartMore 初读 摘要 深度神经网络在训练数据集类别极度不平衡时可能会表现不佳。最近,两阶段方法将表示学习和分类器学习解
![【课程笔记】谭平计算机视觉(Computer Vision)[4]:辐射校准高动态范围图像 - Radiometric Calibration HDR](https://img-blog.csdnimg.cn/20190920221816625.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTMyMzU1ODI=,size_16,color_FFFFFF,t_70)
【课程笔记】谭平计算机视觉(Computer Vision)[4]:辐射校准高动态范围图像 - Radiometric Calibration HDR
视频地址链接 预备知识 radiance:单位面积单位时间单位方向角发出去的能量 irradiance:单位:功率/平方米;单位面积单位时间接收的能量 ISP: image signal processor 白平衡:人眼会自动滤过白炽灯、日光灯、节能灯下对物体的附加颜色,然而相机没有此功能,因此相机具有矫正功能。 vignetting:对于白墙拍照,一般是中间亮周边暗。边缘上光线散开的效果,
LPDDR6与LPDDR5 ZQ Calibration技术探讨
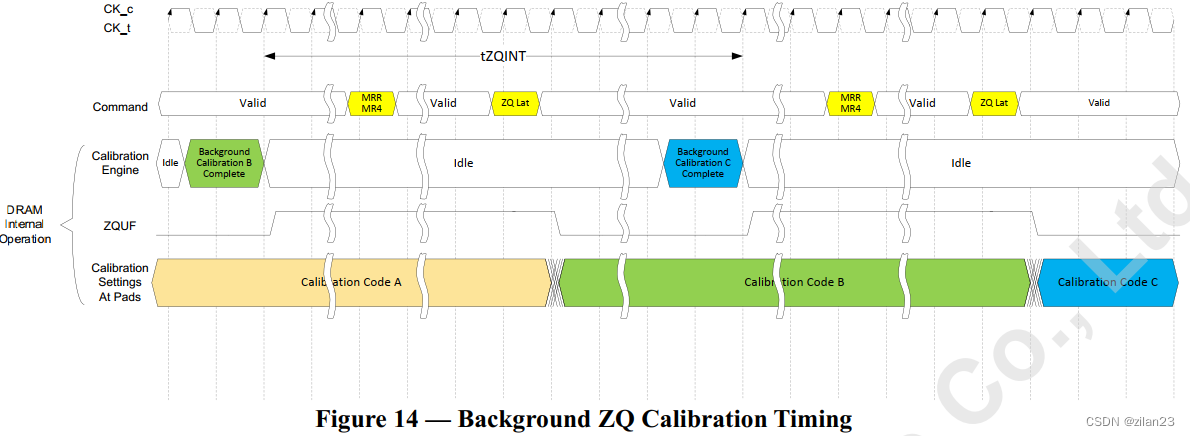
LPDDR6相比LPDDR5在ZQ校准这一块删除了command-based相关的描述,删除了ZQ校准模式切换的描述,仅支持background-based的校准。 回顾一下LPDDR5 基于background-based的校准: background ZQC是通过MR28 OP[5]来选择的,当选择为0(默认)即为background ZQC,当选择为background ZQC后还需
【MQ笔记】张氏标定法学习笔记:A Flexible New Technique for Camera Calibration详解
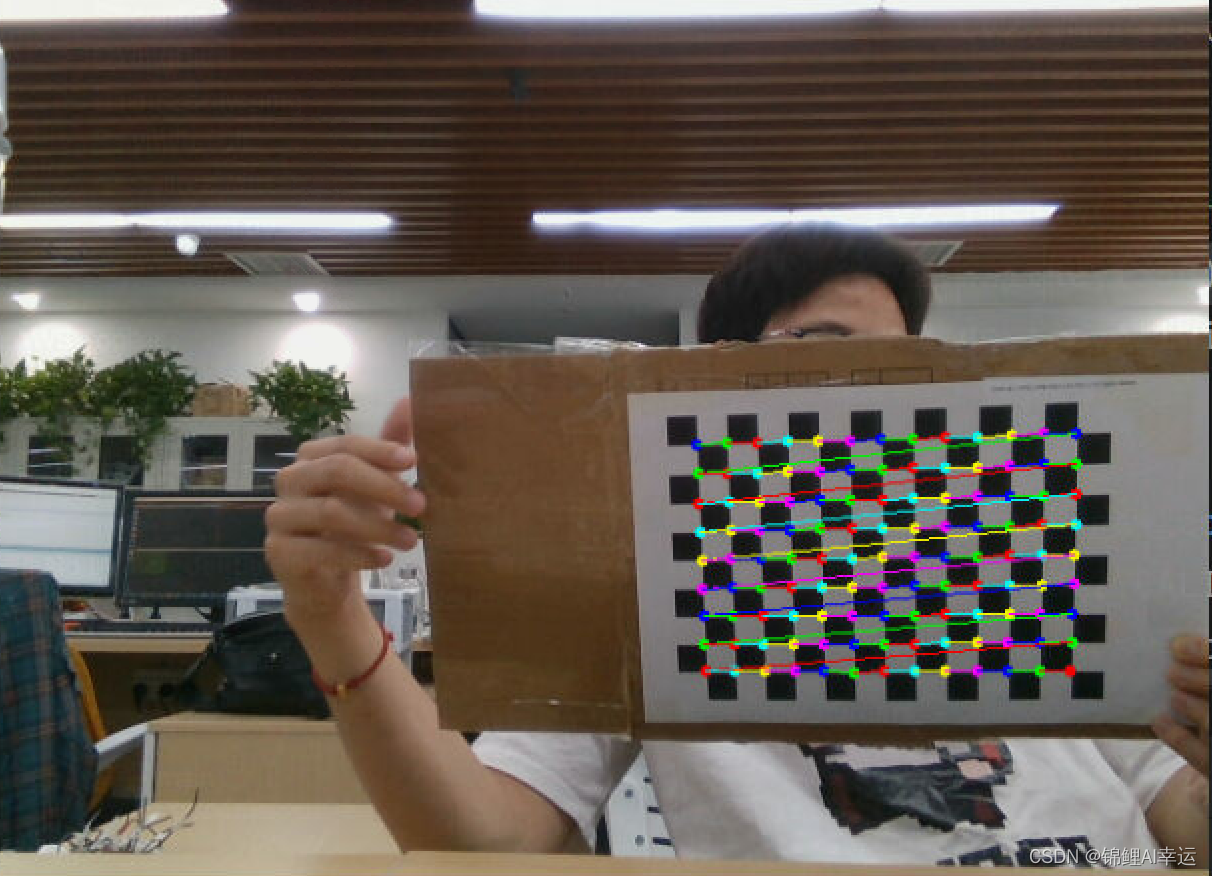
张定友教授于2000年发表在 IEEE TRANSACTIONS ANALYSIS AND MACHINE INTELLIGENCE 上的论文 A Flexible New Technique for Camera Calibration 中提出了著名的张氏标定法,该方法现在已经成为机器视觉领域的重要基础。虽然现在已经有很多成熟的函数或程序可以非常便捷的实现相机标定,但是吃透相关内容对理解相机矫
【工程导向】FA Calibration System Development Documents
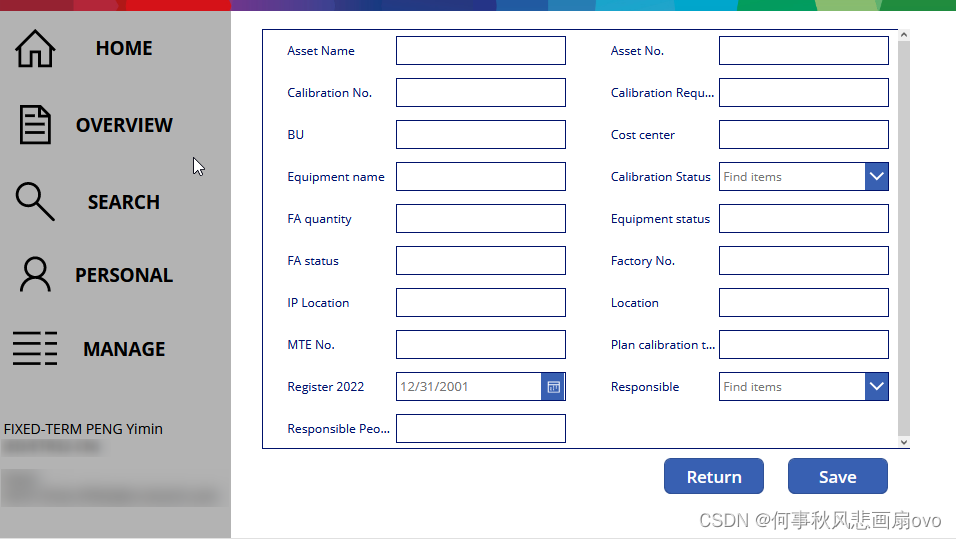
Management System based on PowerApps & PowerAutomate 系统简介1.Lab Overview2.Personal Information3.Search Equipments4.Manage Equipments 补充描述1.Power Apps关键代码2.待解决问题 系统简介 该管理系统依赖于MS的低代码开发平台PowerAp

aruco_calibration相机标定(ARUCO二维码是可以用来进行相机标定的)
转载自:https://blog.csdn.net/weixin_44419695/article/details/88779460
解决 calibration.cpp:3408: error: (-210:Unsupported format or combination of formats)
1、完整报错 报错代码如下: ret, cameraMatrix, distCoeffs, rvecs, tvecs = cv2.calibrateCamera(cal_img.object_points, cal_img.corners, img_size,None, None) cv2.error: OpenCV(4.8.0) /io/opencv/modules
(转)相机参数标定(camera calibration)及标定结果如何使用
https://blog.csdn.net/aoulun/article/details/78768570

【OpenCV4】图像的伽玛矫正gamma fit 伽玛补偿 gamma calibration详解
gamma曲线 gamma 补偿的作用 gamma 补偿可以增加图片像素低的部分的对比度,减小图片像素高的部分的对比度。 也就是图片黑的地方可以看得更清晰,图片亮的地方会变得更模糊。 OpenCV 代码 #include<iostream>#include<opencv2/opencv.hpp>#include<vector>using namespace cv;using
【Python机器学习】零基础掌握calibration_curve概率校准
否曾经困扰于机器学习模型的预测概率不准确? 在现实生活中,我们经常需要做出各种决策,而这些决策通常是基于一定的概率和数据来的。比如说医生可能会基于一系列检查结果来判断一个人是否患有某种疾病。在这种情境下,一个能准确预测概率的模型就显得尤为重要。 假设你是一名数据科学家,在一家医疗健康公司工作。工作任务是根据历史病例数据,预测患者是否有高血压的风险。虽然你已经建立了一个分类模型,但发现模型输出的

Halcon Camera-calibration 相关算子(二)
(1) set_calib_data( : : CalibDataID, ItemType, ItemIdx, DataName, DataValue : ) 功能:在标定数据模型中设置数据。 控制输入参数1:CalibDataID:标定数据模型句柄; 控制输入参数2:ItemType:标定数据项的类型; 控制输入参数3:ItemIdx:受影响项目的索引(取决于选定的ItemType);
Halcon Camera-calibration 相关算子(一)
(1) create_calib_data( : : CalibSetup, NumCameras, NumCalibObjects : CalibDataID) 功能:创建一个Halcon标定数据模型(即建立标定对象),用于存储相机标定的过程、标定数据以及相机标定或手眼标定的结果。 控制输入参数1:CalibSetup:标定类型,Default value: 'calibration_obj

经典文献阅读之--Online Extrinsic Camera Calibration for Temporally Consistent IPM (IPM外参标定)
0. 简介 对于视觉而言,如何使用鸟瞰图来完成车道线的识别和标定是非常重要的,对于鸟瞰图来说,其实有很多种,之前读者的博客中也已经提到过《逆透视变换(IPM)多种方式及代码总结》、《IPM 鸟瞰图公式转换与推导》。这个当然内容还是不太详细,对于各位想要复现难度会比较大,这个时候可以看一下《单应矩阵的推导与理解》这篇文章的详细推导。其实只需要知道精确的外参和内参,以及相机的高度,以及期望的W和H(