本文主要是介绍【STM32 |示例程序】EXTI中断示例程序(对射式红外传感器旋转编码器计次),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
✨✨谢谢大家捧场,祝屏幕前的小伙伴们每天都有好运相伴左右,一定要天天开心哦!✨✨
🎈🎈作者主页: 丠丠64-CSDN博客🎈🎈
✨✨ 帅哥美女们,我们共同加油!一起进步!✨✨

目录
旋转编码器简介
旋转编码器的硬件电路
接线图
编辑
程序-对射式红外传感器(+代码注释)
程序-旋转编码器计次(+代码注释
旋转编码器简介
用来测量位置、速度或旋转方向的装置,当其旋转轴旋转时,其输出端可以输出与旋转速度和方向对应的方波信号,读取方波信号的频率和相位信息即可得知旋转轴的速度和方向
类型:机械触点式/霍尔传感器式/光栅式
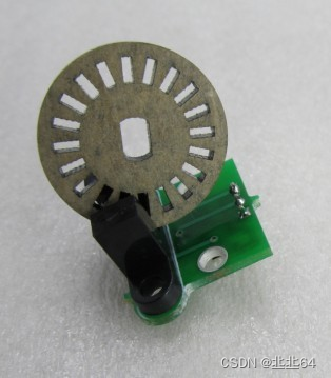
这里使用的也是对射式红外传感器来测速的,为了测速还需配合一个光栅编码盘(银色圆圈),当这个编码盘转动时,红外传感器的红外光就会出现遮挡、透过、遮挡、透过这样的现象,对应模块输出的电平就是高低电平交替的方波,方波的个数代表了转过的角度,方波的频率表示转速,我们就可以用外部中断来捕获这个方波的边沿,以此来判断位置和速度,不过这个模块只有一路输出,正转反转输出波形没法区分,所以这种测试方法只能测位置和速度,不能测量旋转方向

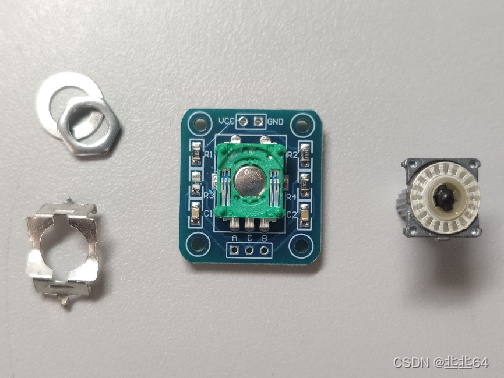
可以看到内部是用金属触电进行通断的,所以它是一种机械触电式编码器,左右是两部分开关触电;中间银色圆形金素片为一个按键,这个旋转编码器的轴是可以按下去的,这种编码器一般是用来进行调节的,比如音响调节音量,因为它是触电接触的形式,所以不适合电机这种高速旋转的地方,另外三种都是非接触的形式,可以用于电机测速(电机测速在电机驱动的应用中还是很常见的)
 金属触电
金属触电
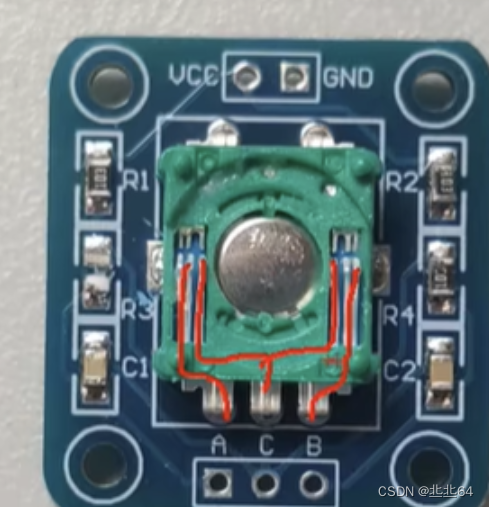 内侧的两根细的触电都是和中间的引脚c连接的,外侧触电一个连接A,一个连接B。
内侧的两根细的触电都是和中间的引脚c连接的,外侧触电一个连接A,一个连接B。
 圆形金属片(按键)的两根线,就在上面引出来了;按键的轴按下,上面两根线短路,松手,上面两根线断开,就是个普通的按键
圆形金属片(按键)的两根线,就在上面引出来了;按键的轴按下,上面两根线短路,松手,上面两根线断开,就是个普通的按键
旋转编码器的硬件电路
模块的电路图如下,图中正方形区域就是旋转编码器,上面按键的两根线这个模块没有使用,是悬空的

 两个触电,旋转轴旋转时,这两个触电以相位相差90度的方式交替导通,因为这只是个开关信号,所以要配合外围电路才能输出高低电平
两个触电,旋转轴旋转时,这两个触电以相位相差90度的方式交替导通,因为这只是个开关信号,所以要配合外围电路才能输出高低电平
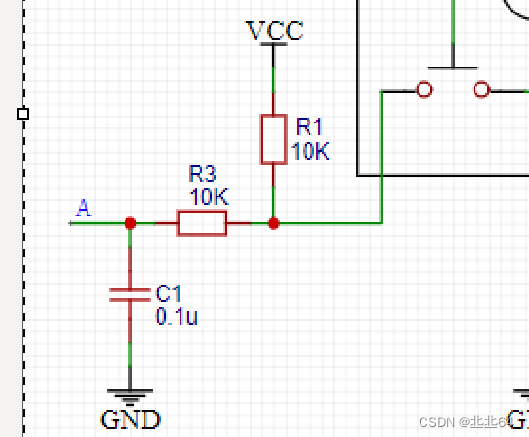 左边接了一个10k的上拉电阻,默认没旋转的情况下,这个点被上拉为高电平,再通过R3这个电阻输出到A端口的就也是高电平,当旋转时,内部触电导通,那C端口处就直接被拉低到GND,再通过R3输出,A端口就是低电平了,之后这个R3是一个输出限流电阻(是为了防止模块引脚电流过大的);C1是输出滤波电容,可以防止一些输出信号抖动。剩下的右边电路和左边是雷同的。
左边接了一个10k的上拉电阻,默认没旋转的情况下,这个点被上拉为高电平,再通过R3这个电阻输出到A端口的就也是高电平,当旋转时,内部触电导通,那C端口处就直接被拉低到GND,再通过R3输出,A端口就是低电平了,之后这个R3是一个输出限流电阻(是为了防止模块引脚电流过大的);C1是输出滤波电容,可以防止一些输出信号抖动。剩下的右边电路和左边是雷同的。
使用这个模块时的接线如下,下面的A相输出和B相输出接到STM32的两个引脚上(主要引脚的尾数不能一样),中间的C引脚就是GND,我们暂时不用
接线图
对射式红外传感器
旋转编码器

程序-对射式红外传感器(+代码注释)
我们的挡光片或者编码盘在这个对射式红外传感器中间经过时,这个DO就会输出电平跳变的信号,然后这个电平跳变的信号触发STM32 PB14号口的中断,我们在中断函数里,执行变量++的程序,然后主循环里用OLED显示这个变量
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化CountSensor_Init(); //计数传感器初始化/*显示静态字符串*/OLED_ShowString(1, 1, "Count:"); //1行1列显示字符串Count:while (1){OLED_ShowNum(1, 7, CountSensor_Get(), 5); //OLED不断刷新显示CountSensor_Get的返回值}
}
countsensor.c
#include "stm32f10x.h" // Device headeruint16_t CountSensor_Count; //全局变量,用于计数/*** 函 数:计数传感器初始化* 参 数:无* 返 回 值:无*/
void CountSensor_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟,外部中断必须开启AFIO的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB14引脚初始化为上拉输入/*AFIO选择中断引脚*/GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);//将外部中断的14号线映射到GPIOB,即选择PB14为外部中断引脚/*EXTI初始化*/EXTI_InitTypeDef EXTI_InitStructure; //定义结构体变量EXTI_InitStructure.EXTI_Line = EXTI_Line14; //选择配置外部中断的14号线EXTI_InitStructure.EXTI_LineCmd = ENABLE; //指定外部中断线使能EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //指定外部中断线为中断模式EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //指定外部中断线为下降沿触发EXTI_Init(&EXTI_InitStructure); //将结构体变量交给EXTI_Init,配置EXTI外设/*NVIC中断分组*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2//即抢占优先级范围:0~3,响应优先级范围:0~3//此分组配置在整个工程中仅需调用一次//若有多个中断,可以把此代码放在main函数内,while循环之前//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置/*NVIC配置*/NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn; //选择配置NVIC的EXTI15_10线NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
}/*** 函 数:获取计数传感器的计数值* 参 数:无* 返 回 值:计数值,范围:0~65535*/
uint16_t CountSensor_Get(void)
{return CountSensor_Count;
}/*** 函 数:EXTI15_10外部中断函数* 参 数:无* 返 回 值:无* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行* 函数名为预留的指定名称,可以从启动文件复制* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入*/
void EXTI15_10_IRQHandler(void)
{if (EXTI_GetITStatus(EXTI_Line14) == SET) //判断是否是外部中断14号线触发的中断{/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0){CountSensor_Count ++; //计数值自增一次}EXTI_ClearITPendingBit(EXTI_Line14); //清除外部中断14号线的中断标志位//中断标志位必须清除//否则中断将连续不断地触发,导致主程序卡死}
}
countsensor.h
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_Hvoid CountSensor_Init(void);
uint16_t CountSensor_Get(void);#endif
程序-旋转编码器计次(+代码注释)
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"int16_t Num; //定义待被旋转编码器调节的变量int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化Encoder_Init(); //旋转编码器初始化/*显示静态字符串*/OLED_ShowString(1, 1, "Num:"); //1行1列显示字符串Num:while (1){Num += Encoder_Get(); //获取自上此调用此函数后,旋转编码器的增量值,并将增量值加到Num上OLED_ShowSignedNum(1, 5, Num, 5); //显示Num}
}
encoder.c
#include "stm32f10x.h" // Device headerint16_t Encoder_Count; //全局变量,用于计数旋转编码器的增量值/*** 函 数:旋转编码器初始化* 参 数:无* 返 回 值:无*/
void Encoder_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟,外部中断必须开启AFIO的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB0和PB1引脚初始化为上拉输入/*AFIO选择中断引脚*/GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);//将外部中断的0号线映射到GPIOB,即选择PB0为外部中断引脚GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1);//将外部中断的1号线映射到GPIOB,即选择PB1为外部中断引脚/*EXTI初始化*/EXTI_InitTypeDef EXTI_InitStructure; //定义结构体变量EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1; //选择配置外部中断的0号线和1号线EXTI_InitStructure.EXTI_LineCmd = ENABLE; //指定外部中断线使能EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //指定外部中断线为中断模式EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //指定外部中断线为下降沿触发EXTI_Init(&EXTI_InitStructure); //将结构体变量交给EXTI_Init,配置EXTI外设/*NVIC中断分组*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2//即抢占优先级范围:0~3,响应优先级范围:0~3//此分组配置在整个工程中仅需调用一次//若有多个中断,可以把此代码放在main函数内,while循环之前//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置/*NVIC配置*/NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //选择配置NVIC的EXTI0线NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; //选择配置NVIC的EXTI1线NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //指定NVIC线路的响应优先级为2NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
}/*** 函 数:旋转编码器获取增量值* 参 数:无* 返 回 值:自上此调用此函数后,旋转编码器的增量值*/
int16_t Encoder_Get(void)
{/*使用Temp变量作为中继,目的是返回Encoder_Count后将其清零*//*在这里,也可以直接返回Encoder_Count但这样就不是获取增量值的操作方法了也可以实现功能,只是思路不一样*/int16_t Temp;Temp = Encoder_Count;Encoder_Count = 0;return Temp;
}/*** 函 数:EXTI0外部中断函数* 参 数:无* 返 回 值:无* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行* 函数名为预留的指定名称,可以从启动文件复制* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入*/
void EXTI0_IRQHandler(void)
{if (EXTI_GetITStatus(EXTI_Line0) == SET) //判断是否是外部中断0号线触发的中断{/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) //PB0的下降沿触发中断,此时检测另一相PB1的电平,目的是判断旋转方向{Encoder_Count --; //此方向定义为反转,计数变量自减}}EXTI_ClearITPendingBit(EXTI_Line0); //清除外部中断0号线的中断标志位//中断标志位必须清除//否则中断将连续不断地触发,导致主程序卡死}
}/*** 函 数:EXTI1外部中断函数* 参 数:无* 返 回 值:无* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行* 函数名为预留的指定名称,可以从启动文件复制* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入*/
void EXTI1_IRQHandler(void)
{if (EXTI_GetITStatus(EXTI_Line1) == SET) //判断是否是外部中断1号线触发的中断{/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0) //PB1的下降沿触发中断,此时检测另一相PB0的电平,目的是判断旋转方向{Encoder_Count ++; //此方向定义为正转,计数变量自增}}EXTI_ClearITPendingBit(EXTI_Line1); //清除外部中断1号线的中断标志位//中断标志位必须清除//否则中断将连续不断地触发,导致主程序卡死}
}
encoder.h
#ifndef __ENCODER_H
#define __ENCODER_Hvoid Encoder_Init(void);
int16_t Encoder_Get(void);#endif
希望对你有帮助
这篇关于【STM32 |示例程序】EXTI中断示例程序(对射式红外传感器旋转编码器计次)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




