对射专题

小白跟做江科大32单片机之对射式红外传感器计次
原理部分 1中断示意图,中断会打断主函数的执行,终端执行完成之后再返回主函数继续执行 2.STM32中断 这些灰色的是内核中断 这些白色的是普通中断 3.NVIC统一管理中断,每个中断通道都拥有16个可编程的优先等级,可对优先级进行分组,进一步设置抢占优先级和响应优先级 4.抢占优先级是表示可以直接插队让CPU执行,相当于急诊 响应优先级就是看谁的优先级高,

【STM32 |示例程序】EXTI中断示例程序(对射式红外传感器旋转编码器计次)
✨✨谢谢大家捧场,祝屏幕前的小伙伴们每天都有好运相伴左右,一定要天天开心哦!✨✨ 🎈🎈作者主页: 丠丠64-CSDN博客🎈🎈 ✨✨ 帅哥美女们,我们共同加油!一起进步!✨✨ 目录 旋转编码器简介 旋转编码器的硬件电路 接线图 编辑 程序-对射式红外传感器(+代码注释) 程序-旋转编码器计次(+代码注释 旋转编码器简介 用来测量位置、速度或旋转方向
江科大stm32学习笔记——【5-2】对射式红外传感器计次旋转编码计次
一.对射式红外传感器计次 1.原理 2.硬件连接 3.程序 CountSensor.c: #include "stm32f10x.h" // Device header#include "Delay.h"uint16_t CountSensor_Count;void CountSensor_Init(void){//配置RCC时钟:RCC_
32单片机基础:对射式红外传感器计次
接线如下图: 在HardWare建立两个文件:如图 COuntSensor.c 如何配置外部中断,根据下面图,我们需要把外部中断从GPIO到NVIC这一路出现的外设模块都配置好。把这条信号打通就OK了。 1.配置RCC:把我们这里涉及的外设时钟都打开,不打开时钟,外设是没法工作的 2.配置GPIO,选择我们的端口为输入模式 3.配置AFIO,选择我们用的这一路的GPIO,连接

【STM32】STM32学习笔记-对射式红外传感器计次 旋转编码器计次(12)
00. 目录 文章目录 00. 目录01. NVIC相关函数1.1 NVIC_PriorityGroupConfig函数1.2 NVIC_PriorityGroup类型1.3 NVIC_Init函数1.4 NVIC_InitTypeDef类型 02. 外部中断相关API2.1 GPIO_EXTILineConfig2.2 EXTI_Init2.3 EXTI_GetITStatus2.4 E
【STM32】STM32学习笔记-对射式红外传感器计次 旋转编码器计次(12)
00. 目录 文章目录 00. 目录01. NVIC相关函数1.1 NVIC_PriorityGroupConfig函数1.2 NVIC_PriorityGroup类型1.3 NVIC_Init函数1.4 NVIC_InitTypeDef类型 02. 外部中断相关API2.1 GPIO_EXTILineConfig2.2 EXTI_Init2.3 EXTI_GetITStatus2.4 E
Linux驱动(中断、异步通知):红外对射,并在Qt StatusBus使用指示灯进行显示
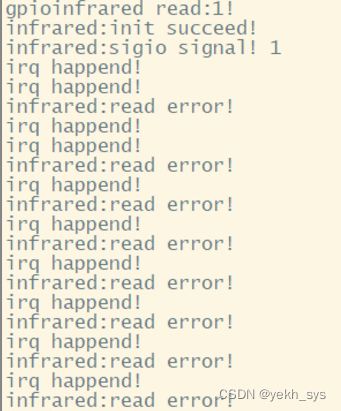
本文工作: 1、Linux驱动与应用程序编写:使用了设备树、中断、异步通知知识点,实现了红外对射状态的异步信息提醒。 2、QT程序编写:自定义了一个“文本指示灯”类,并放置在QMainWidget的StatusBus中。 3、C与C++混合编程与调试:将Linux C下的面向过程转化为QT C++的面向对象。但是Linux C下signal函数需要使用static函数作为传入参数,但是C++
MSP430 DM430-A开发板学习笔记(三)测速模块(计数传对射感器)的使用
MSP430 DM430-A开发板学习笔记(三)测速模块(计数传对射感器)的使用 1.传感器说明 简要说明: 一、长尺寸:32mm X宽11mm X高20mm 二、主要芯片:LM393、对射式红外头 三、工作电压:直流5伏 四、特点: 1、具有信号输出指示。 2、单路信号输出。 3、输出有效信号为低电平。 4、灵敏度不可调。 5、可用于工件计数、电机测速。。。。 6、电路板输出开关量! 2

无人装车系统,红外对射测量光栅立大功
随着科技的不断发展,无人自动化装车已经成为了现代物流行业的一个重要趋势。为了实现无人自动化装车,需要对车辆的位置进行精准的检测。而红外测量光栅技术正是一种高效、精确的检测技术。 红外测量光栅技术利用红外线的特性,通过发射器和接收器之间的光栅来检测车辆的位置。当车辆经过光栅时,会遮挡光线,从而触发接收器发出信号,进而确定车辆的位置。这种技术不仅可以实现对车辆位置的高精度检测,还可以实现对车辆的速度和
![P12[5-2]STM32:对射式红外传感器代码部分(内含实物图+外部信号流程,编写代码思路+代码+解析代码和扩展应用)](https://img-blog.csdnimg.cn/ae3478115f4041e891a3e73f007195a6.png)
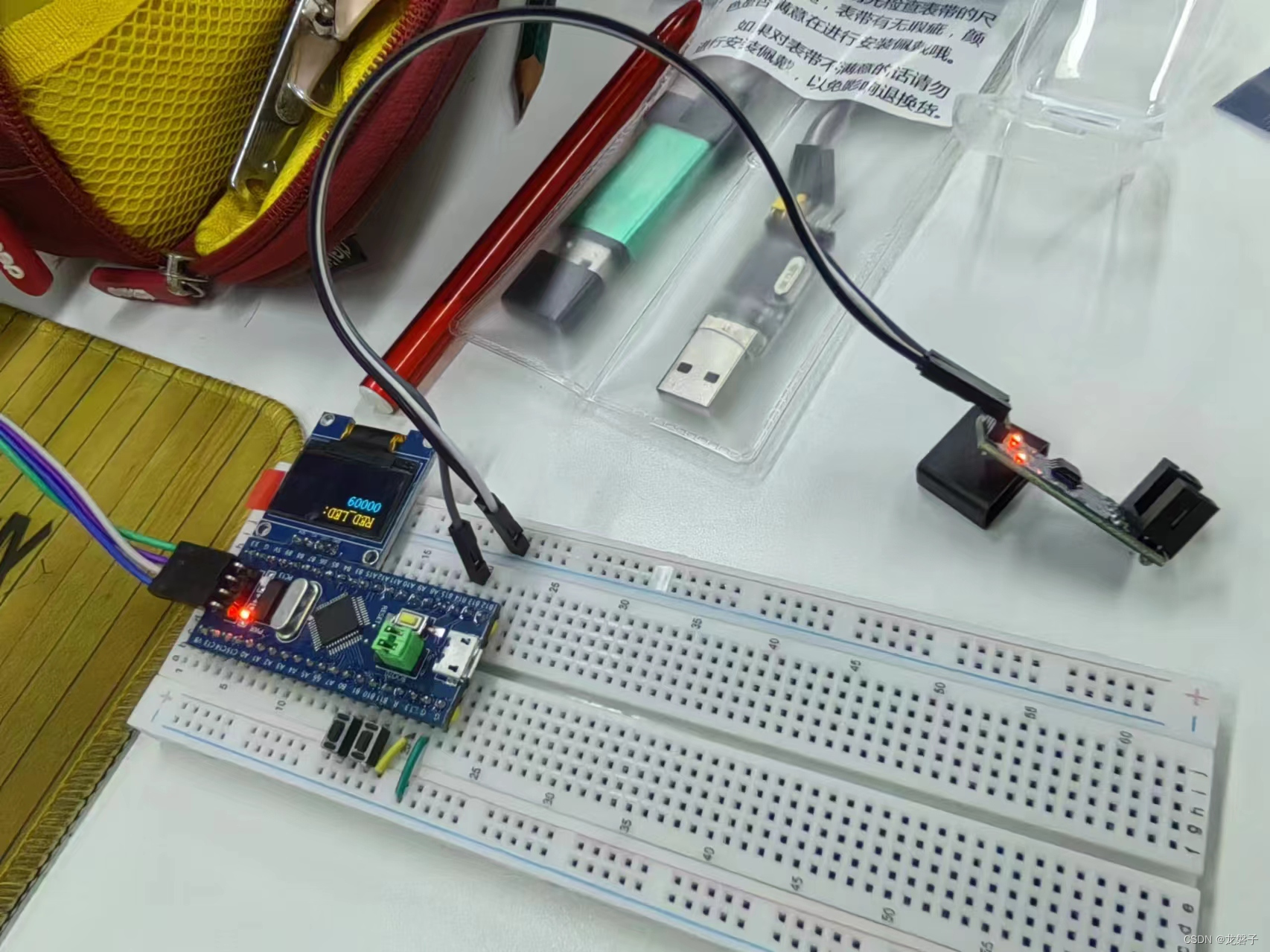
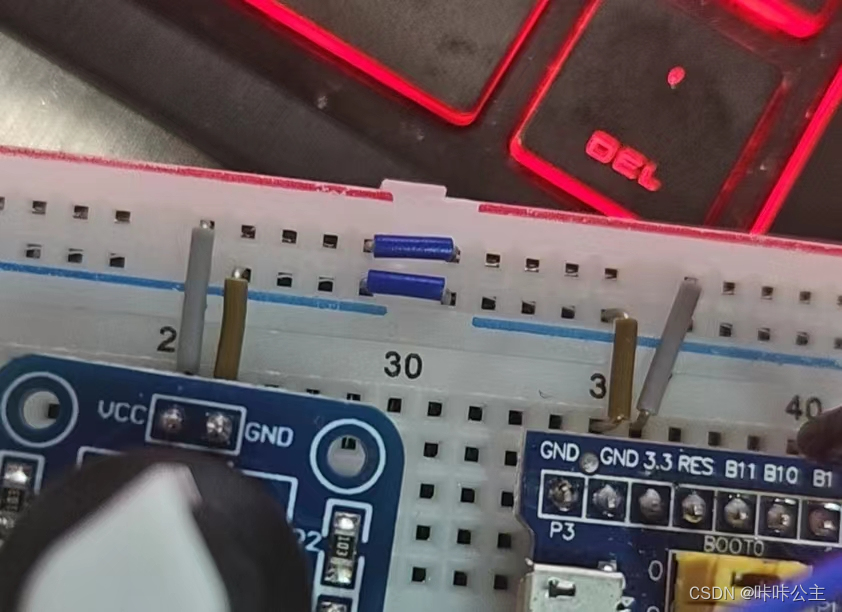
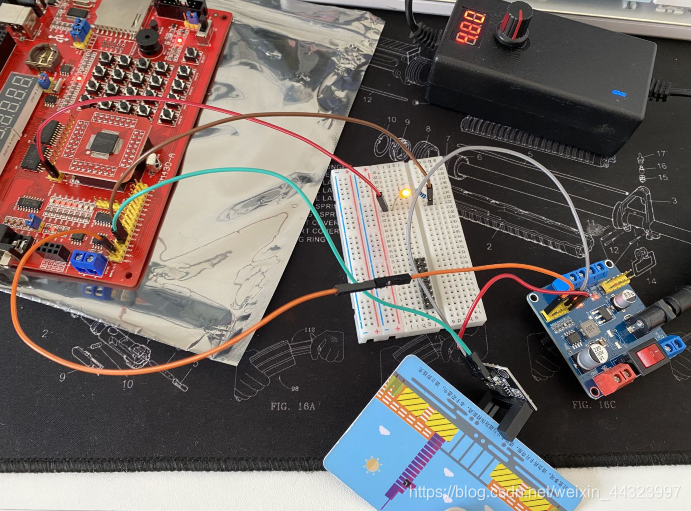
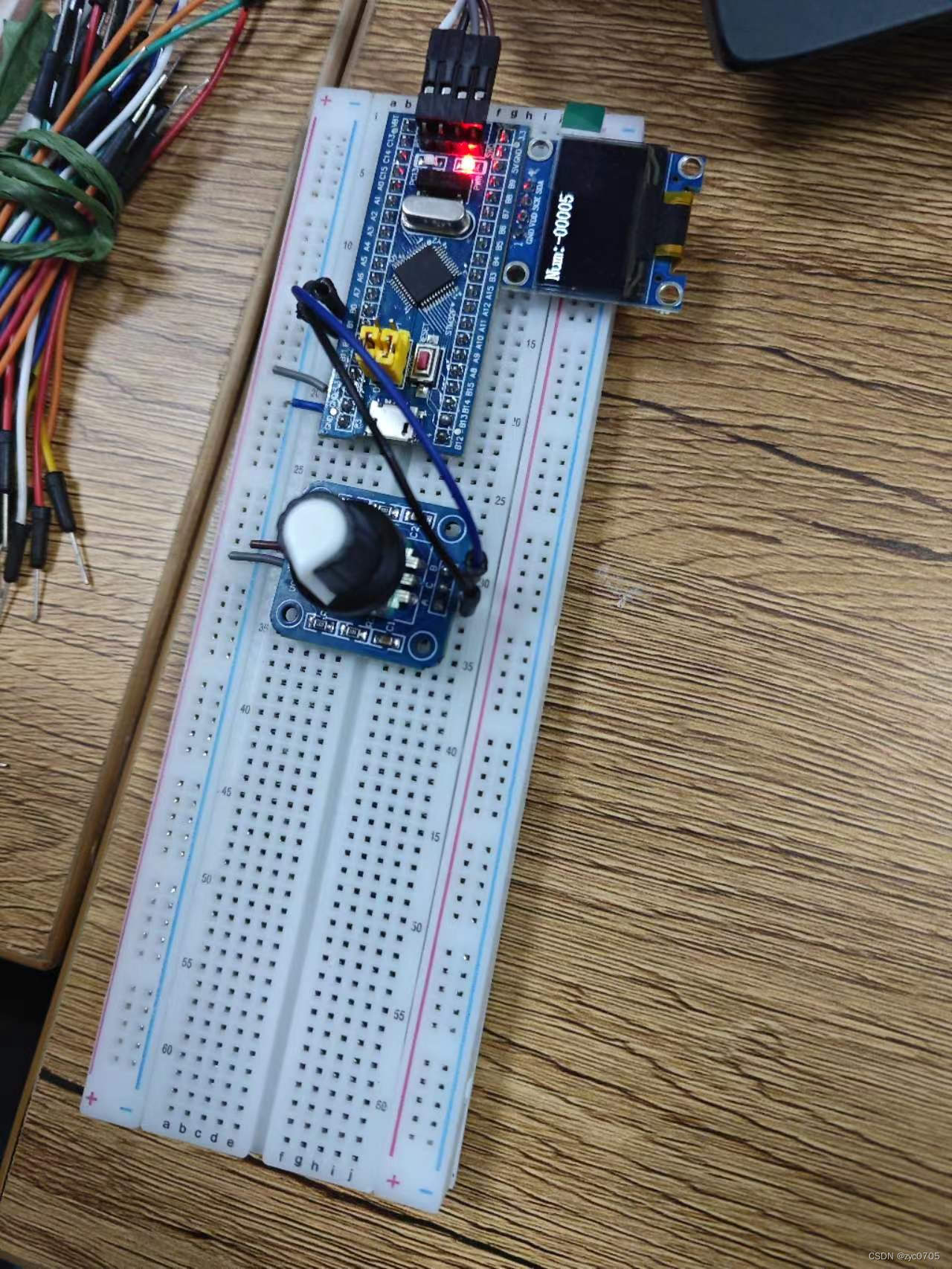
P12[5-2]STM32:对射式红外传感器代码部分(内含实物图+外部信号流程,编写代码思路+代码+解析代码和扩展应用)
1.实物连接图: 左下角的D0接任意一个空闲的IO口均可,此处接的是PB14。当对射式红外传感器被遮挡住时,D0发送中断信号给PB14并完成相关操作。 2.外部信号流程(代码部分编写的原理): 外部信号总思路:(配置外部中断)GPIO-->AFIO-->EXTI-->NVIC-->(中断函数)CPU
stm32学习笔记:中断的应用:对射式红外传感器计次旋转编码器计次
相关API介绍 EXT配置API(stm32f10x exti.h) NVIC 配置API (misc.h) 初始化的中断的步骤 第一步:配置RCC时钟,把涉及外设的时钟都打开 第二步:配置GPIO,设置为输入模式 第三步:配置AFIO,选择某个GPIO口连接到EXTI(边缘检测及控制器) 第四步:配置EXTI(不需要开启时钟,原因不详),选择边沿触发方