本文主要是介绍服务智能化公共生活场景人员检测计数,基于YOLOv9系列【yolov9/yolov9-c/yolov9-e】参数模型开发构建公共生活场景下人员检测计数识别系统,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在当今社会,随着科技的飞速发展,各种智能化系统已广泛应用于各个领域,特别是在人员密集、流动性大的场合,如商场、火车站、景区等,智能人员检测计数系统发挥着至关重要的作用。特别是在特殊时期,如节假日、大型活动或突发事件时,这些系统更是成为了保障人员安全、维护秩序的关键工具。智能人员检测计数系统通常基于先进的图像处理技术和传感器技术,通过安装在关键位置的摄像头和传感器,实时捕捉和记录人员流动情况。系统能够自动分析图像数据,准确计算出进出人员数量。
1、及时预警,避免超载:在节假日、大型活动等特殊时期,人流量往往会急剧增加。智能人员检测计数系统能够实时监测人流量,当接近或超过系统预设的负荷容量时,系统能够自动发出预警信号,提醒管理团队及时采取措施,如限制人员进入、增加服务人员等,从而避免超载现象的发生。
2、优化资源配置,提高管理效率:通过实时获取人员流动数据,管理团队可以更加准确地预测未来一段时间内的人流量变化,从而优化资源配置,如提前增加服务人员、调整安保措施等。这不仅可以提高管理效率,还可以为游客提供更加优质的服务体验。
3、保障人员安全,维护秩序:在特殊时期,人流量大、人员密集,容易发生安全事故。智能人员检测计数系统能够实时监测人员流动情况,一旦发现异常情况(如人员聚集、拥堵等),系统可以立即发出警报,提醒管理团队及时采取措施,从而保障人员安全、维护现场秩序。
本文正是基于这样的思考,想要从实验的角度出发来尝试开发构建应用于公共生活场景下的人员检测识别计数系统,核心是对摄像头画面的人员进行准确检测计数,以便于为后续预警管理等提供数据决策支撑。
在前文中我们基于经典的YOLOv5、YOLOv8开发构建了对应的实践性质的项目,感兴趣的话可以自行移步阅读:
《服务智能化公共生活场景人员检测计数,基于YOLOv5全系列参数模型【n/s/m/l/x】开发构建公共生活场景下人员检测计数识别系统》
《服务智能化公共生活场景人员检测计数,基于YOLOv8全系列【n/s/m/l/x】参数模型开发构建公共生活场景下人员检测计数识别系统》
本文则是想要基于最新发表的YOLOv9系列的不同参数量级的模型来开发对应的检测模型,首先看下实例效果:

接下来看下实例数据集:



关于YOLOv9的论文相关的介绍可以看这里:
《太卷了,目标检测新成员——YOLOv9: Learning What You Want to LearnUsing Programmable Gradient Information他来了》
如果想要基于YOLOv9从零开始开发构建自己的个性化目标检测系统,可以参照这里:
《基于YOLO家族最新模型YOLOv9开发构建自己的个性化目标检测系统从零构建模型完整训练、推理计算超详细教程【以自建数据酸枣病虫害检测为例】》
YOLOv9的作者人为很多模型设计过程中现有的方法忽略了一个事实,即当输入数据经过逐层特征提取和空间变换时,会丢失大量信息。目前,可以缓解这一现象的主要方法为:(1)可逆架构的使用:使用重复输入数据并以显式方式保持输入数据的信息;(2)掩码建模的使用:利用重构损失并采用隐式方式来最大化提取的特征并保留输入信息;以及(3)深监督概念的引入:使用未丢失太多重要信息的浅层特征预先建立从特征到目标的映射,以确保重要信息能够传递到更深的层次。然而,上述方法在训练过程和推理过程中存在不同的缺点。例如,可逆架构需要额外的层来组合重复馈送的输入数据,这将显著增加推理成本。此外,由于输入数据层到输出层不能有太深的路径,这种限制将使得在训练过程中对高阶语义信息的建模变得困难。至于掩码建模,其重构损失有时会与目标损失冲突。此外,大多数掩码机制还会与数据产生不正确的关联。对于深监督机制,它将产生误差积累,如果浅监督在训练过程中丢失信息,那么后续层将无法检索到所需的信息。上述现象在困难任务和小模型上将更为显著。所以作者深入研究数据通过深度网络传输时数据丢失的重要问题,即信息瓶颈和可逆函数进而提出了可编程梯度信息(PGI)以应对深度网络实现多个目标所需的各种变化。PGI可以为目标任务提供完整的输入信息来计算目标函数,从而获得可靠的梯度信息来更新网络权重。此外,还设计了一种新的基于梯度路径规划的轻量级网络架构——广义高效层聚合网络(GELAN)。GELAN的架构证实了PGI在轻量级模型上取得了卓越的成果。
YOLOv9贡献总结如下:
1.我们从可逆函数的角度对现有的深度神经网络架构进行了理论分析,并通过这个过程成功地解释了许多过去难以解释的现象。在此基础上,我们还设计了PGI和辅助可逆分支,并取得了良好的效果。
2.我们设计的PGI解决了深度监控只能用于极深度神经网络架构的问题,从而使新的轻量级架构能够真正应用于日常生活。
3.我们设计的GELAN仅使用传统卷积,比基于最先进技术的深度卷积设计实现了更高的参数使用率,同时显示出轻、快、准确的巨大优势。
4.将所提出的PGI和GELAN相结合,YOLOv9在MS COCO数据集上的目标检测性能在各个方面都大大超过了现有的实时目标检测器。
训练数据配置文件内容如下:
# Dataset
path: ./dataset
train:- images/train
val:- images/test
test:- images/test# Classes
names:0: person这里我们一共应用开发了三款模型,如下:
【yolov9】
# YOLOv9# parameters
nc: 1 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
#activation: nn.LeakyReLU(0.1)
#activation: nn.ReLU()# anchors
anchors: 3# YOLOv9 backbone
backbone:[[-1, 1, Silence, []], # conv down[-1, 1, Conv, [64, 3, 2]], # 1-P1/2# conv down[-1, 1, Conv, [128, 3, 2]], # 2-P2/4# elan-1 block[-1, 1, RepNCSPELAN4, [256, 128, 64, 1]], # 3# conv down[-1, 1, Conv, [256, 3, 2]], # 4-P3/8# elan-2 block[-1, 1, RepNCSPELAN4, [512, 256, 128, 1]], # 5# conv down[-1, 1, Conv, [512, 3, 2]], # 6-P4/16# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 7# conv down[-1, 1, Conv, [512, 3, 2]], # 8-P5/32# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 9]# YOLOv9 head
head:[# elan-spp block[-1, 1, SPPELAN, [512, 256]], # 10# up-concat merge[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 7], 1, Concat, [1]], # cat backbone P4# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 13# up-concat merge[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 5], 1, Concat, [1]], # cat backbone P3# elan-2 block[-1, 1, RepNCSPELAN4, [256, 256, 128, 1]], # 16 (P3/8-small)# conv-down merge[-1, 1, Conv, [256, 3, 2]],[[-1, 13], 1, Concat, [1]], # cat head P4# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 19 (P4/16-medium)# conv-down merge[-1, 1, Conv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 22 (P5/32-large)# routing[5, 1, CBLinear, [[256]]], # 23[7, 1, CBLinear, [[256, 512]]], # 24[9, 1, CBLinear, [[256, 512, 512]]], # 25# conv down[0, 1, Conv, [64, 3, 2]], # 26-P1/2# conv down[-1, 1, Conv, [128, 3, 2]], # 27-P2/4# elan-1 block[-1, 1, RepNCSPELAN4, [256, 128, 64, 1]], # 28# conv down fuse[-1, 1, Conv, [256, 3, 2]], # 29-P3/8[[23, 24, 25, -1], 1, CBFuse, [[0, 0, 0]]], # 30 # elan-2 block[-1, 1, RepNCSPELAN4, [512, 256, 128, 1]], # 31# conv down fuse[-1, 1, Conv, [512, 3, 2]], # 32-P4/16[[24, 25, -1], 1, CBFuse, [[1, 1]]], # 33 # elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 34# conv down fuse[-1, 1, Conv, [512, 3, 2]], # 35-P5/32[[25, -1], 1, CBFuse, [[2]]], # 36# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 37# detect[[31, 34, 37, 16, 19, 22], 1, DualDDetect, [nc]], # DualDDetect(A3, A4, A5, P3, P4, P5)]
【yolov9-c】
# YOLOv9# parameters
nc: 1 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
#activation: nn.LeakyReLU(0.1)
#activation: nn.ReLU()# anchors
anchors: 3# YOLOv9 backbone
backbone:[[-1, 1, Silence, []], # conv down[-1, 1, Conv, [64, 3, 2]], # 1-P1/2# conv down[-1, 1, Conv, [128, 3, 2]], # 2-P2/4# elan-1 block[-1, 1, RepNCSPELAN4, [256, 128, 64, 1]], # 3# avg-conv down[-1, 1, ADown, [256]], # 4-P3/8# elan-2 block[-1, 1, RepNCSPELAN4, [512, 256, 128, 1]], # 5# avg-conv down[-1, 1, ADown, [512]], # 6-P4/16# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 7# avg-conv down[-1, 1, ADown, [512]], # 8-P5/32# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 9]# YOLOv9 head
head:[# elan-spp block[-1, 1, SPPELAN, [512, 256]], # 10# up-concat merge[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 7], 1, Concat, [1]], # cat backbone P4# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 13# up-concat merge[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 5], 1, Concat, [1]], # cat backbone P3# elan-2 block[-1, 1, RepNCSPELAN4, [256, 256, 128, 1]], # 16 (P3/8-small)# avg-conv-down merge[-1, 1, ADown, [256]],[[-1, 13], 1, Concat, [1]], # cat head P4# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 19 (P4/16-medium)# avg-conv-down merge[-1, 1, ADown, [512]],[[-1, 10], 1, Concat, [1]], # cat head P5# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 22 (P5/32-large)# multi-level reversible auxiliary branch# routing[5, 1, CBLinear, [[256]]], # 23[7, 1, CBLinear, [[256, 512]]], # 24[9, 1, CBLinear, [[256, 512, 512]]], # 25# conv down[0, 1, Conv, [64, 3, 2]], # 26-P1/2# conv down[-1, 1, Conv, [128, 3, 2]], # 27-P2/4# elan-1 block[-1, 1, RepNCSPELAN4, [256, 128, 64, 1]], # 28# avg-conv down fuse[-1, 1, ADown, [256]], # 29-P3/8[[23, 24, 25, -1], 1, CBFuse, [[0, 0, 0]]], # 30 # elan-2 block[-1, 1, RepNCSPELAN4, [512, 256, 128, 1]], # 31# avg-conv down fuse[-1, 1, ADown, [512]], # 32-P4/16[[24, 25, -1], 1, CBFuse, [[1, 1]]], # 33 # elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 34# avg-conv down fuse[-1, 1, ADown, [512]], # 35-P5/32[[25, -1], 1, CBFuse, [[2]]], # 36# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 37# detection head# detect[[31, 34, 37, 16, 19, 22], 1, DualDDetect, [nc]], # DualDDetect(A3, A4, A5, P3, P4, P5)]
【yolov9-e】
# YOLOv9# parameters
nc: 1 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
#activation: nn.LeakyReLU(0.1)
#activation: nn.ReLU()# anchors
anchors: 3# YOLOv9 backbone
backbone:[[-1, 1, Silence, []],# conv down[-1, 1, Conv, [64, 3, 2]], # 1-P1/2# conv down[-1, 1, Conv, [128, 3, 2]], # 2-P2/4# csp-elan block[-1, 1, RepNCSPELAN4, [256, 128, 64, 2]], # 3# avg-conv down[-1, 1, ADown, [256]], # 4-P3/8# csp-elan block[-1, 1, RepNCSPELAN4, [512, 256, 128, 2]], # 5# avg-conv down[-1, 1, ADown, [512]], # 6-P4/16# csp-elan block[-1, 1, RepNCSPELAN4, [1024, 512, 256, 2]], # 7# avg-conv down[-1, 1, ADown, [1024]], # 8-P5/32# csp-elan block[-1, 1, RepNCSPELAN4, [1024, 512, 256, 2]], # 9# routing[1, 1, CBLinear, [[64]]], # 10[3, 1, CBLinear, [[64, 128]]], # 11[5, 1, CBLinear, [[64, 128, 256]]], # 12[7, 1, CBLinear, [[64, 128, 256, 512]]], # 13[9, 1, CBLinear, [[64, 128, 256, 512, 1024]]], # 14# conv down[0, 1, Conv, [64, 3, 2]], # 15-P1/2[[10, 11, 12, 13, 14, -1], 1, CBFuse, [[0, 0, 0, 0, 0]]], # 16# conv down[-1, 1, Conv, [128, 3, 2]], # 17-P2/4[[11, 12, 13, 14, -1], 1, CBFuse, [[1, 1, 1, 1]]], # 18 # csp-elan block[-1, 1, RepNCSPELAN4, [256, 128, 64, 2]], # 19# avg-conv down fuse[-1, 1, ADown, [256]], # 20-P3/8[[12, 13, 14, -1], 1, CBFuse, [[2, 2, 2]]], # 21 # csp-elan block[-1, 1, RepNCSPELAN4, [512, 256, 128, 2]], # 22# avg-conv down fuse[-1, 1, ADown, [512]], # 23-P4/16[[13, 14, -1], 1, CBFuse, [[3, 3]]], # 24 # csp-elan block[-1, 1, RepNCSPELAN4, [1024, 512, 256, 2]], # 25# avg-conv down fuse[-1, 1, ADown, [1024]], # 26-P5/32[[14, -1], 1, CBFuse, [[4]]], # 27# csp-elan block[-1, 1, RepNCSPELAN4, [1024, 512, 256, 2]], # 28]# YOLOv9 head
head:[# multi-level auxiliary branch # elan-spp block[9, 1, SPPELAN, [512, 256]], # 29# up-concat merge[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 7], 1, Concat, [1]], # cat backbone P4# csp-elan block[-1, 1, RepNCSPELAN4, [512, 512, 256, 2]], # 32# up-concat merge[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 5], 1, Concat, [1]], # cat backbone P3# csp-elan block[-1, 1, RepNCSPELAN4, [256, 256, 128, 2]], # 35# main branch # elan-spp block[28, 1, SPPELAN, [512, 256]], # 36# up-concat merge[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 25], 1, Concat, [1]], # cat backbone P4# csp-elan block[-1, 1, RepNCSPELAN4, [512, 512, 256, 2]], # 39# up-concat merge[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 22], 1, Concat, [1]], # cat backbone P3# csp-elan block[-1, 1, RepNCSPELAN4, [256, 256, 128, 2]], # 42 (P3/8-small)# avg-conv-down merge[-1, 1, ADown, [256]],[[-1, 39], 1, Concat, [1]], # cat head P4# csp-elan block[-1, 1, RepNCSPELAN4, [512, 512, 256, 2]], # 45 (P4/16-medium)# avg-conv-down merge[-1, 1, ADown, [512]],[[-1, 36], 1, Concat, [1]], # cat head P5# csp-elan block[-1, 1, RepNCSPELAN4, [512, 1024, 512, 2]], # 48 (P5/32-large)# detect[[35, 32, 29, 42, 45, 48], 1, DualDDetect, [nc]], # DualDDetect(A3, A4, A5, P3, P4, P5)]
实验阶段我们保持了相同的参数设置,等待长时期的训练过程结束之后我们来对以上三款不同参数量级的模型进行纵向的对比分析,如下:
【Precision曲线】
精确率曲线(Precision-Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。
精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。
绘制精确率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率和召回率。
将每个阈值下的精确率和召回率绘制在同一个图表上,形成精确率曲线。
根据精确率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察精确率曲线,我们可以根据需求确定最佳的阈值,以平衡精确率和召回率。较高的精确率意味着较少的误报,而较高的召回率则表示较少的漏报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
精确率曲线通常与召回率曲线(Recall Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。

【Recall曲线】
召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。
召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。
绘制召回率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的召回率和对应的精确率。
将每个阈值下的召回率和精确率绘制在同一个图表上,形成召回率曲线。
根据召回率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察召回率曲线,我们可以根据需求确定最佳的阈值,以平衡召回率和精确率。较高的召回率表示较少的漏报,而较高的精确率意味着较少的误报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
召回率曲线通常与精确率曲线(Precision Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。

【loss】

【F1值曲线】
F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能。
F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。
绘制F1值曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率、召回率和F1分数。
将每个阈值下的精确率、召回率和F1分数绘制在同一个图表上,形成F1值曲线。
根据F1值曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
F1值曲线通常与接收者操作特征曲线(ROC曲线)一起使用,以帮助评估和比较不同模型的性能。它们提供了更全面的分类器性能分析,可以根据具体应用场景来选择合适的模型和阈值设置。

【mAP0.5】
mAP0.5,也被称为mAP@0.5或AP50,指的是当Intersection over Union(IoU)阈值为0.5时的平均精度(mean Average Precision)。IoU是一个用于衡量预测边界框与真实边界框之间重叠程度的指标,其值范围在0到1之间。当IoU值为0.5时,意味着预测框与真实框至少有50%的重叠部分。
在计算mAP0.5时,首先会为每个类别计算所有图片的AP(Average Precision),然后将所有类别的AP值求平均,得到mAP0.5。AP是Precision-Recall Curve曲线下面的面积,这个面积越大,说明AP的值越大,类别的检测精度就越高。
mAP0.5主要关注模型在IoU阈值为0.5时的性能,当mAP0.5的值很高时,说明算法能够准确检测到物体的位置,并且将其与真实标注框的IoU值超过了阈值0.5。

【mAP0.5:0.95】
mAP0.5:0.95,也被称为mAP@[0.5:0.95]或AP@[0.5:0.95],表示在IoU阈值从0.5到0.95变化时,取各个阈值对应的mAP的平均值。具体来说,它会在IoU阈值从0.5开始,以0.05为步长,逐步增加到0.95,并在每个阈值下计算mAP,然后将这些mAP值求平均。
这个指标考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。当mAP0.5:0.95的值很高时,说明算法在不同阈值下的检测结果均非常准确,覆盖面广,可以适应不同的场景和应用需求。
对于一些需求比较高的场合,比如安全监控等领域,需要保证高的准确率和召回率,这时mAP0.5:0.95可能更适合作为模型的评价标准。
综上所述,mAP0.5和mAP0.5:0.95都是用于评估目标检测模型性能的重要指标,但它们的关注点有所不同。mAP0.5主要关注模型在IoU阈值为0.5时的性能,而mAP0.5:0.95则考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。
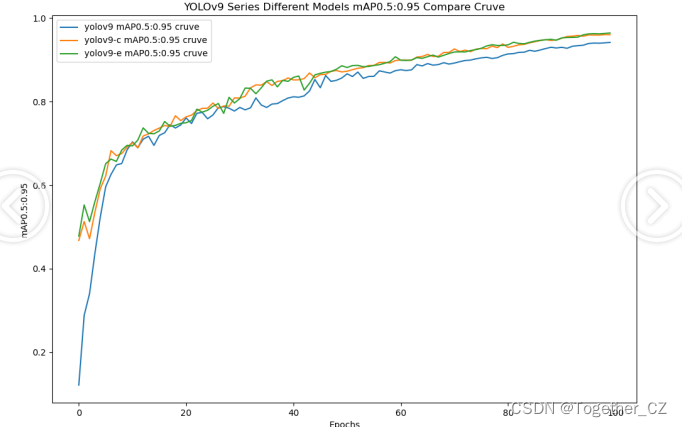
综合三款不同参数量级模型的开发实验对比结果来看:没有非常明显的差距,这里我们考虑使用yolov9来作为线上推理模型。
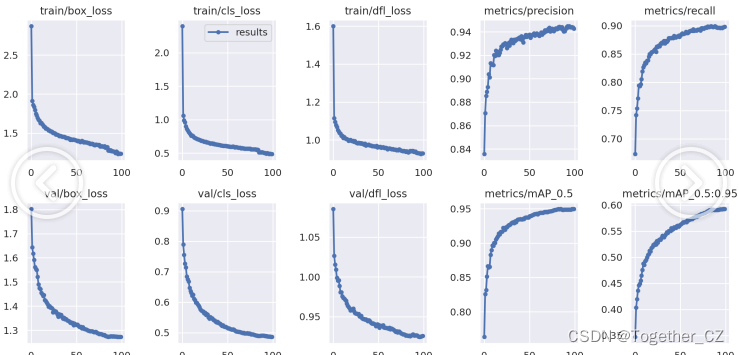
接下来看下yolov9模型的详细情况。
【离线推理实例】

【Batch实例】

【混淆矩阵】

【F1值曲线】

【Precision曲线】

【PR曲线】

【Recall曲线】

【训练可视化】
公共生活场景下的智能化人员检测计数系统相比于传统的人工预警手段来说有着突出的优势:
1、实时性与准确性:系统能够实时捕捉和记录人员流动情况,并通过先进的图像处理技术和传感器技术,准确计算出进出人员数量。这种实时性和准确性对于人员密集场合来说至关重要,特别是在需要快速响应和决策的情况下。
2、提高管理效率:系统能够自动分析数据,实时更新显示进出人数数量,减少了人工统计的繁琐和误差。这使得管理团队能够更快速地了解人员流动情况,优化资源配置,提高管理效率。
3、安全管理:系统能够实时监控人员流动情况,一旦发现异常情况(如人员聚集、拥堵等),可以立即发出警报,提醒管理团队及时采取措施,从而保障人员安全、维护现场秩序。
4、信息化管理:系统能够记录和管理人员通行数据,实现信息化管理。这使得人员通行数据有迹可循,便于后续分析和处理。同时,系统还支持电脑备份和数据导出,方便数据的存储和分享。
5、科学决策支持:通过对人员流动数据的统计和分析,系统可以为管理团队提供科学依据,帮助他们制定更加合理的经营策略和安全措施。
但是也不可避免的存在着一些棘手的问题:
1、技术成本:智能人员检测计数系统通常需要较高的技术成本,包括硬件设备的购置、软件的开发以及系统的维护等。对于一些小型企业或者预算有限的组织来说,这可能是一个不小的负担。
2、环境因素干扰:在人员密集场合,环境因素(如光线变化、遮挡等)可能会对系统的准确性和稳定性产生影响。此外,如果系统没有充分考虑到这些因素,可能会导致误报或漏报的情况发生。
3、依赖电力和网络:智能人员检测计数系统通常需要依赖电力和网络才能正常运行。如果发生停电或者网络故障等意外情况,系统可能会受到影响甚至无法正常工作。
4、隐私保护问题:在人员密集场合,智能人员检测计数系统可能会涉及到大量的个人隐私信息。如果系统没有采取足够的安全措施来保护这些信息,可能会引发隐私泄露等问题。
本文只是从一个理想实验的角度来思考实践了这个想法,相信后续会有更加成熟优秀的产品出来造福社会。
感兴趣的话也都可以自行实践下!
这篇关于服务智能化公共生活场景人员检测计数,基于YOLOv9系列【yolov9/yolov9-c/yolov9-e】参数模型开发构建公共生活场景下人员检测计数识别系统的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




