本文主要是介绍Linux接口驱动03 - SWIM(脱离ST烧录器,单线完美升级STM8的固件,附带总结经验和源代码),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、需求概述
如何摆脱ST官方烧录器的束缚,编写一个Linux驱动,完成ARM-A9 Soc对STM8固件的升级烧录?二、目标步骤:
- 1.准备好一个编译好的固件(bin格式文件);
- 2.平台Soc激活STM8的SWIM模块;
- 3.平台Soc通过SWIM单线向STM8的Flash中烧录固件。
三、A9 Soc 通过SWIM模块完成STM8的固件烧录
1. 管脚连接示意图:
/********************************************************* A9 Soc STM8* -------------------- --------------------* (PD26) gpio |--->>---| rst(硬复位管脚) * (PD27) gpio |<------>| swim * -------------------- --------------------*******************************************************/
2. 代码示例(包含Linux驱动和应用程序)
点击跳转GitHub - 代码示例SWIM
3. 重难点
- ARM Soc内部PWM完成对纳秒级别时间段的定时
- ARM Soc普通gpio电平跳变时毛刺的消除和时间的缩短
- ARM Soc普通gpio对纳秒级别的反馈输入的检测
- STM8的SWIM功能和工作方式
- STM8的Flash的访问
四、STM8相关介绍
1. STM8的调试模块SWIM
1) STM8调试系统组成部分有哪些?
主要两大模块:
| 序号 | 模块 | 释义 |
|---|---|---|
| 1. | SWIM(serial wire interface module) | 单线接口模块(划重点)。 SWIM 的接口是一个基于异步、强灌电流(8mA)、开漏、双向通信的单线接口。 |
| 2. | DM(debug module) |
2)STM8调试系统存在的意义何在?
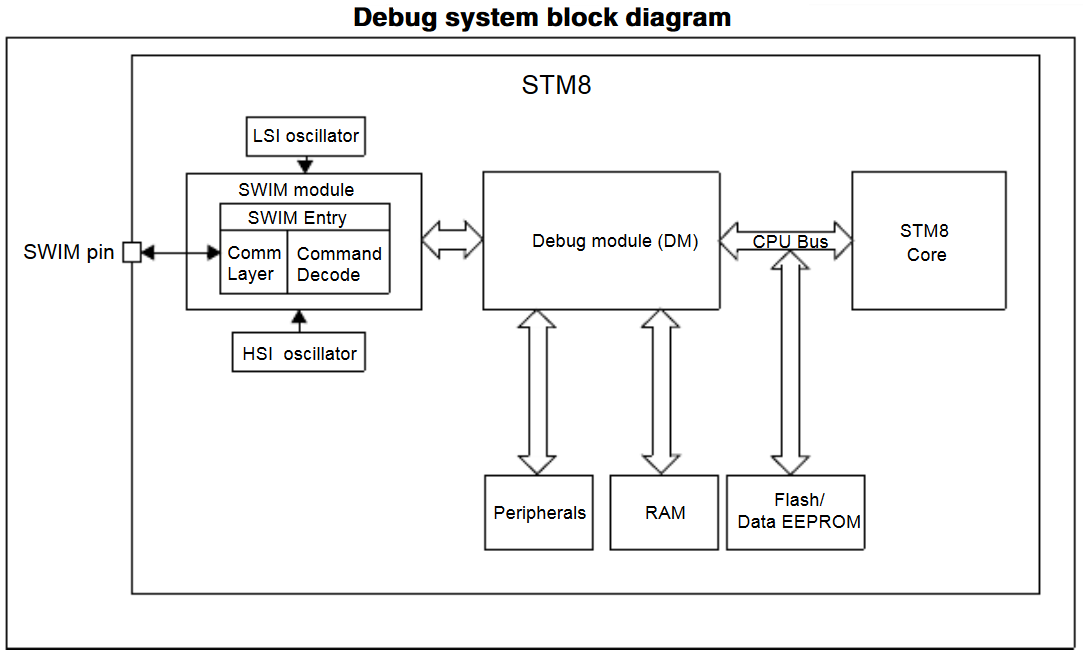
STM8调试系统接口,允许被调试或编程工具通过单线连接,进行双向通信;该调试接口提供对STM8的RAM和外围设备的非侵入性读/写访问。
3)调试系统的结构框图长啥样?
如图:
4)SWIM都有哪些功能?论SWIM的工作模式
注意:
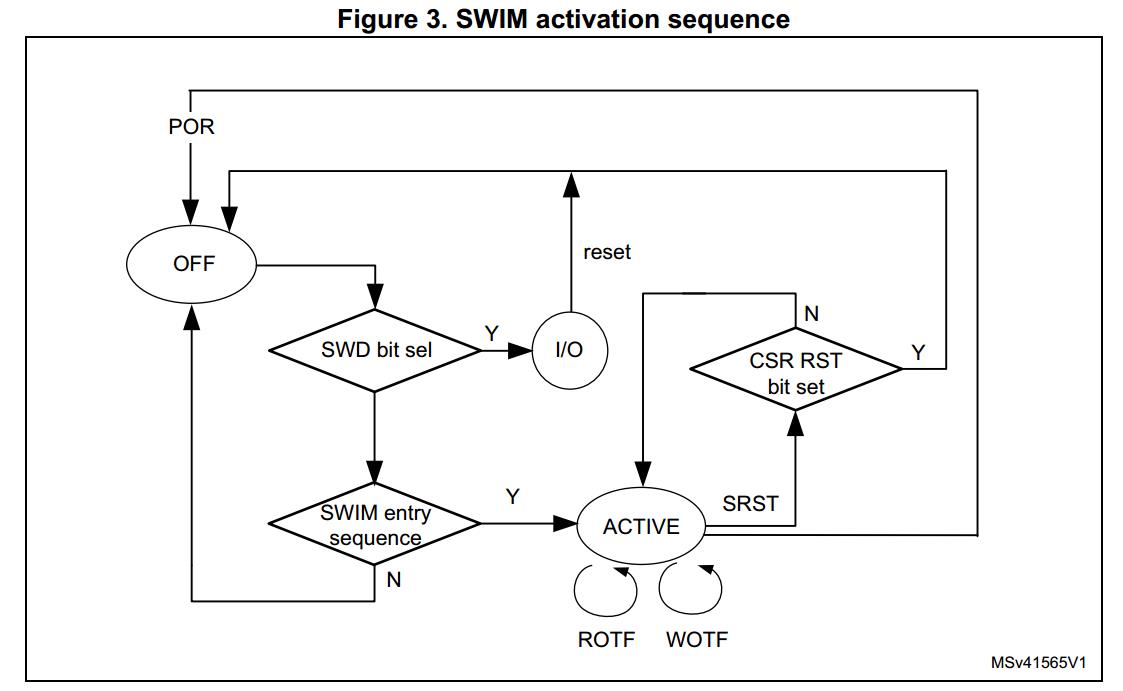
- 在STM8上电复位时,SWIM自动进入OFF模式,STM8内部低速RC时钟自动启动,并强制保持打开。
- 只要SWIM处于OFF模式,SWIM仍然可以检测激活序列,无论是复位期间还是程序运行期间;
| 工作模式 | 概述 |
|---|---|
| OFF模式 | 该模式下,SWIM管脚不能当作IO口,等待进入激活序列或者切换到IO模式 |
| I/O模式 | 可置位MCR寄存器的IOM位来进入该模式。当作IO脚后,无法使用内部的调试器来使用系统调试功能 |
| Active模式下 | 在OFF模式下,通过特定序列激活进入该模式。 |
SWIM的激活流程图:
SWIM激活序列
激活序列起于高电平,终于高电平。
两组脉冲
- 4个频率为1KHz的脉冲
- 4个频率为2KHz的脉冲
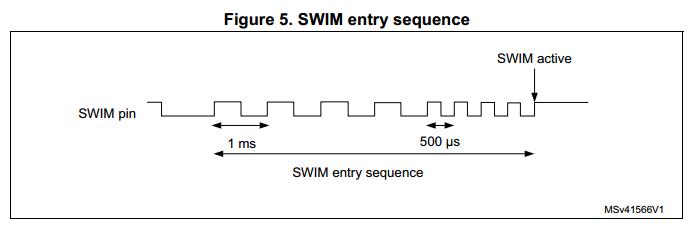
注意:
经过实验,使用750Hz和1.5Khz脉冲组合序列也可完成SWIM的激活,但尽量使用官方文档提供的脉冲序列组合激活SWIM。
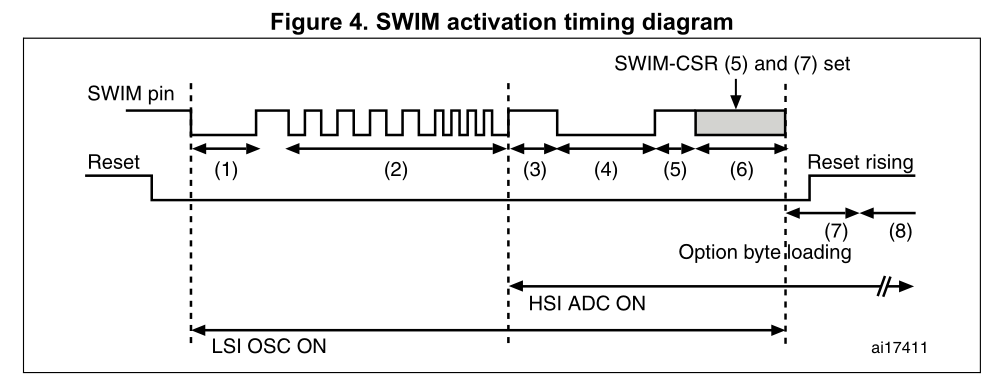
5)如何激活SWIM?SWIM激活步骤(如图:SWIM激活时序图)
| 序号 | 任务 |
|---|---|
| 0. | 拉低stm8的rst管脚,//>mdelay(10) |
| (1). | 拉低stm8的swim管脚,至少16us,//mdelay(1) |
| (2). | A9 Soc向stm8灌输swim激活序列 |
| (3). | A9 Soc开始监测swim管脚的输入 |
| (4). | A9 Soc等待stm8的swim的16us的低电平同步信号(swim检测到激活序列后,进入Active模式,内部高速时钟开启)(128*HSI = 16us) |
| (5). | A9 Soc拉高STM8的swim管脚 //>300ns |
| (6). | A9 Soc向STM8的0x7f80地址(SWIM_SCR寄存器)写0xa0的数据; 1.设置位5,使能整个内存空间和SRST命令可以访问。 2.设置位7,屏蔽内部复位源 //写后最好间隔一会儿//10ms |
| (7). | A9 Soc拉高STM8复位管脚,至少等待1ms来让STM8装载其配置参数 //>1ms |
| (8). | 一旦设备稳定一切正常,STM8的cpu将进入“第8阶段”: 1. STM8将被暂停,HSI为16MHz(更精确的HSI详见具体产品手册) 2. SWIM时钟为HSI/2=8MHz 3. SWIM被激活,其通信方式进入“低速位格式” |
SWIM激活时序图
6)其他Soc如何同STM8的SWIM模块进行通信?swim位格式 - 低速位格式
22个HSI振荡周期表示1bit数据
| 数据0/1的表示 | 低速位格式表达(SWIM模块对应解码规则) |
|---|---|
| 数据0 | 20个0脉冲后接着2个1脉冲(连续的0脉冲大于等于9个) |
| 数据1 | 2个0脉冲后接着20个1脉冲(连续的0脉冲小于等于8个) |
2. 如何访问STM8的Flash
- 暂停CPU
- Flash关闭写保护、解锁
- 然后以页的形式,按地址进行读写访问
1)STM8的内部Flash简介
- 一页64bytes
- 最大128页
Flash解锁(使用"选项字"来控制,类似于控制命令)
2) STM8的Flash的WOTF(write-on-the-fly)
略,详见附附件手册和代码实现;
static int swim_send_unit(unsigned char data, unsigned char len){signed char i=0, j=0, retry=1, cnt=0;unsigned char p=0, m=0;
#define SWIM_SEND_CHECK_TIMEOUT 300for(retry=1; retry>0; retry--){swim_set_output_high();swim_send_bit(0);p = 0;for (i=len-1; i>=0; --i){m = (data >> i) & 1;swim_send_bit(m);p += m;}swim_send_bit(p&1); // parity bitswim_set_input(); //check ackfor(cnt=0; cnt<SWIM_SEND_CHECK_TIMEOUT; cnt++){if(!swim_get_input_val())break;}if(cnt>SWIM_SEND_CHECK_TIMEOUT){j++;printk(KERN_ALERT "St8 Bug: No ack.try again...\n");if(j > 3){swim_set_output_high();return -1;}elsecontinue;}time_ndelay(1000); //125*8nsif(swim_get_input_val())break;time_ndelay(1750);}swim_set_output_high();return (retry<=0);
}
#define SWIM_CMD_LEN 3
#define SWIM_CMD_SRST 0x00
#define SWIM_CMD_ROTF 0x01
#define SWIM_CMD_WOTF 0x02static int swim_write_buf(unsigned int addr, char* buf, unsigned int n){unsigned int i = 0;if(swim_send_unit(SWIM_CMD_WOTF, SWIM_CMD_LEN))return -1;if(swim_send_unit(n, 8))return -2; //Nif(swim_send_unit(0, 8))return -3; //@Eif(swim_send_unit((addr>>8)&0xff, 8))return -4; //@Hif(swim_send_unit(addr&0xff, 8))return -5; //@Lfor(i=0; i<n; i++){#if 0if(!(i%8))printk(KERN_ALERT "addr(%#x-%#x):|%#x %#x %#x %#x %#x %#x %#x %#x|\n", addr+i, addr+i+7, buf[i], buf[i+1], buf[i+2], buf[i+3], buf[i+4], buf[i+5], buf[i+6], buf[i+7]);#endifif(swim_send_unit(buf[i], 8))break;}if(i<n)return -6;return 0;
}
3)向STM8的Flash中写入固件的步骤:
假设
- STM8的固件大小为size(单位为bytes)
- 固件大小换算为页为:pageCnt = size/64 + (((size%64) > 0)?1:0);
| 序号 | 读寄存器 | 写寄存器 | 值(读/写) | 目的 |
|---|---|---|---|---|
| 1. | 0x7f99 | 0x08 | DM_CSR2寄存器,暂停cpu | |
| 2. | 0x5062 | 0x56 | FLASH_PUKR寄存器,关闭写保护 | |
| mdelay(1) | 延时 | |||
| 3. | 0x5062 | 0xae | FLASH_PUKR寄存器,解锁Flash | |
| mdelay(10) | 延时 | |||
| 4. | 0x505b | 0x01 | FLASH_CR2寄存器,启用标准块编程操作(自动第一次擦除) | |
| 5. | 0x505c | 0xfe | FLASH_NCR2寄存器,仅启动块编程操作 | |
| 6. | 0x8000+n*64 | fileBufPointer + n *64 | 指定位置按块写数据 | |
| 7. | 延迟10ms, 等待该页数据完全刷入Flash |
4)按页写Flash示例
for(int i=0; i<pageCnt; i++){if(write_byte(0x505b, 0x01))return -4;if(write_byte(0x505c, 0xfe))return -5;if(write_buf(0x8000+i*64, buf+i*64, 64))return -6;mdelay(10);}
五、注意点和问题总结
1) 问题1 - 电源问题
问题情景:
STM8复位时使用Soc的pin复位时,系统重启;示波器显示swim的电压波动偏幅大;
问题分析和解决:
可能是电容放电太快,波动了系统的电源稳定性。调整了一些外围硬件,问题解决。
2) 问题2 - 标准pinctrl子系统并不好用
问题情景:
-
使用sunxi封装好的pinctrl子系统操作gpio管脚,管脚上电平跳变的耗时在50us左右,pinctrl操作会影响入口时序的准确性,因为STM8的SWIM对激活时序要求还是挺严格的,
-
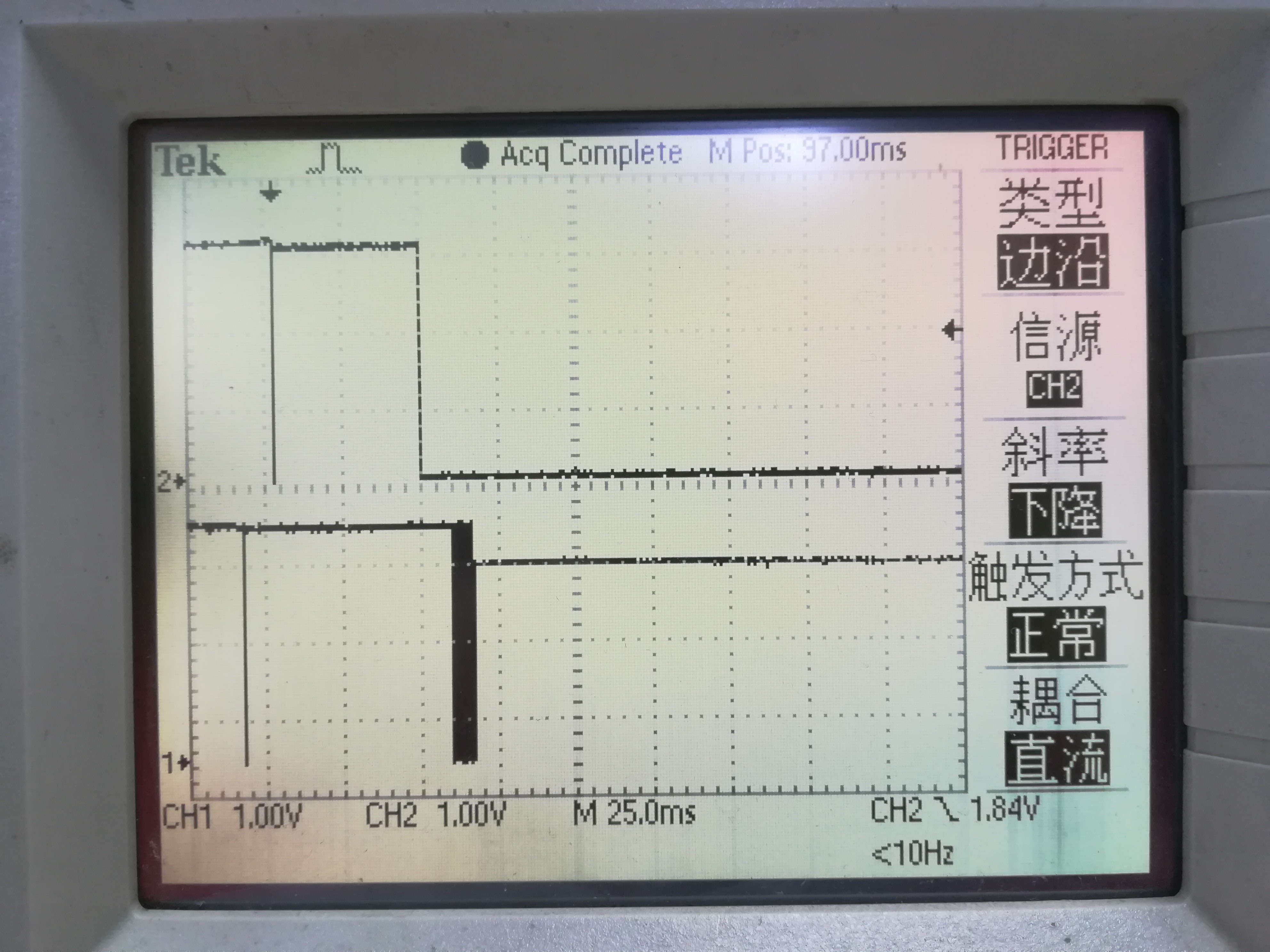
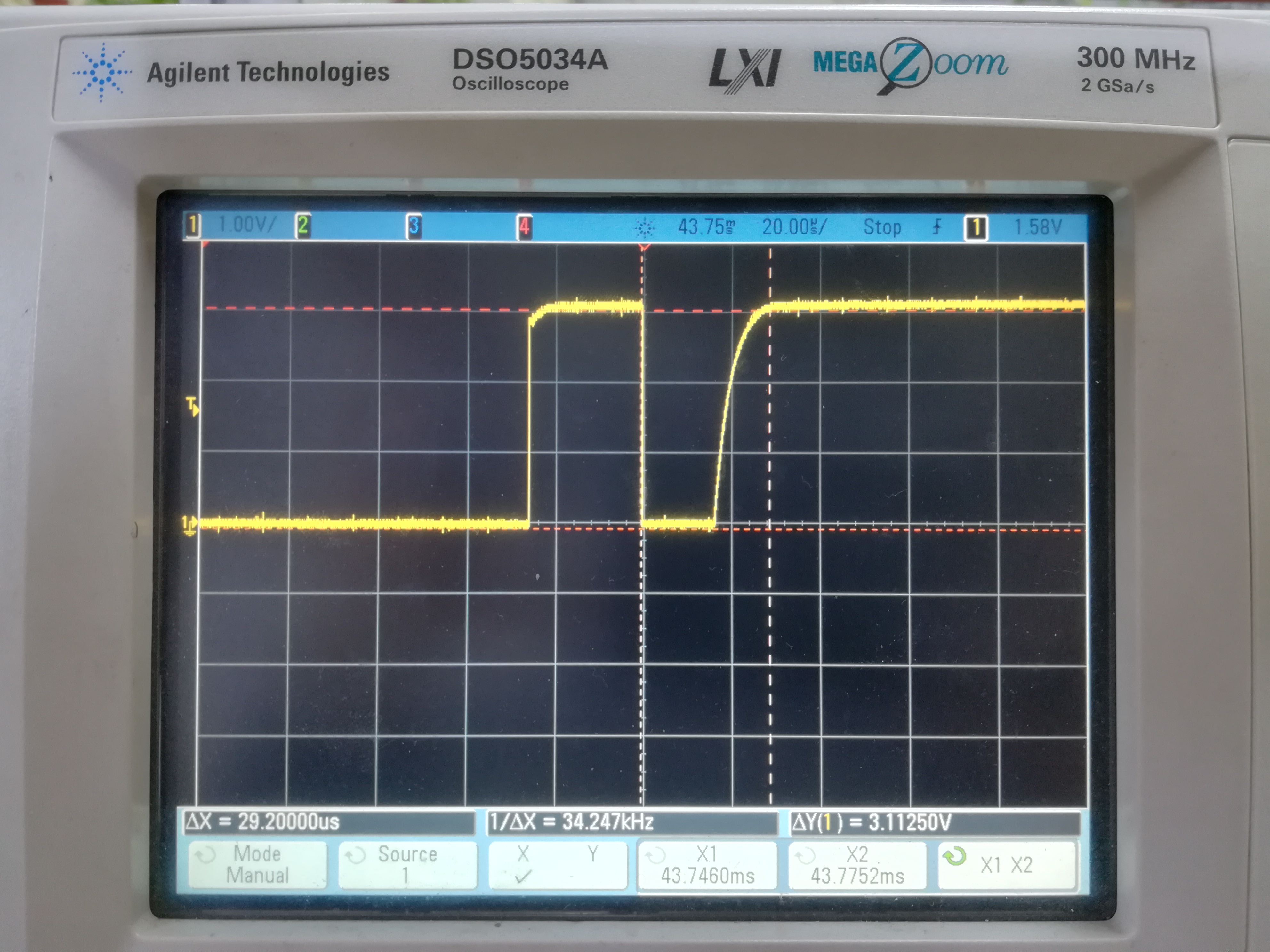
在使用pinctr的时候很容易出现瞬低毛刺(可能其内部同时操作一系列相关寄存器时,波及了管脚的电平输出,可见Allwinner在硬件的设计上有一些问题),如图(在拉高rst和swim的时候,很明显分别出现了瞬低毛刺):
(图中上边为RST,下边为SWIM信号线的信号)
问题分析和解决:
操作了过多的相关寄存器,我们可以自己封装控制GPIO的接口,尽量减少对不必要寄存器的控制,以减少Soc硬件出错的几率,以减少操作过多寄存器所消耗的时间
3)问题3 - 示波器精度和ST的STM的SWIM入口激活序列
- 激活序列的时钟组合之间的要精确,pin相关寄存器的控制耗时也要算进去。
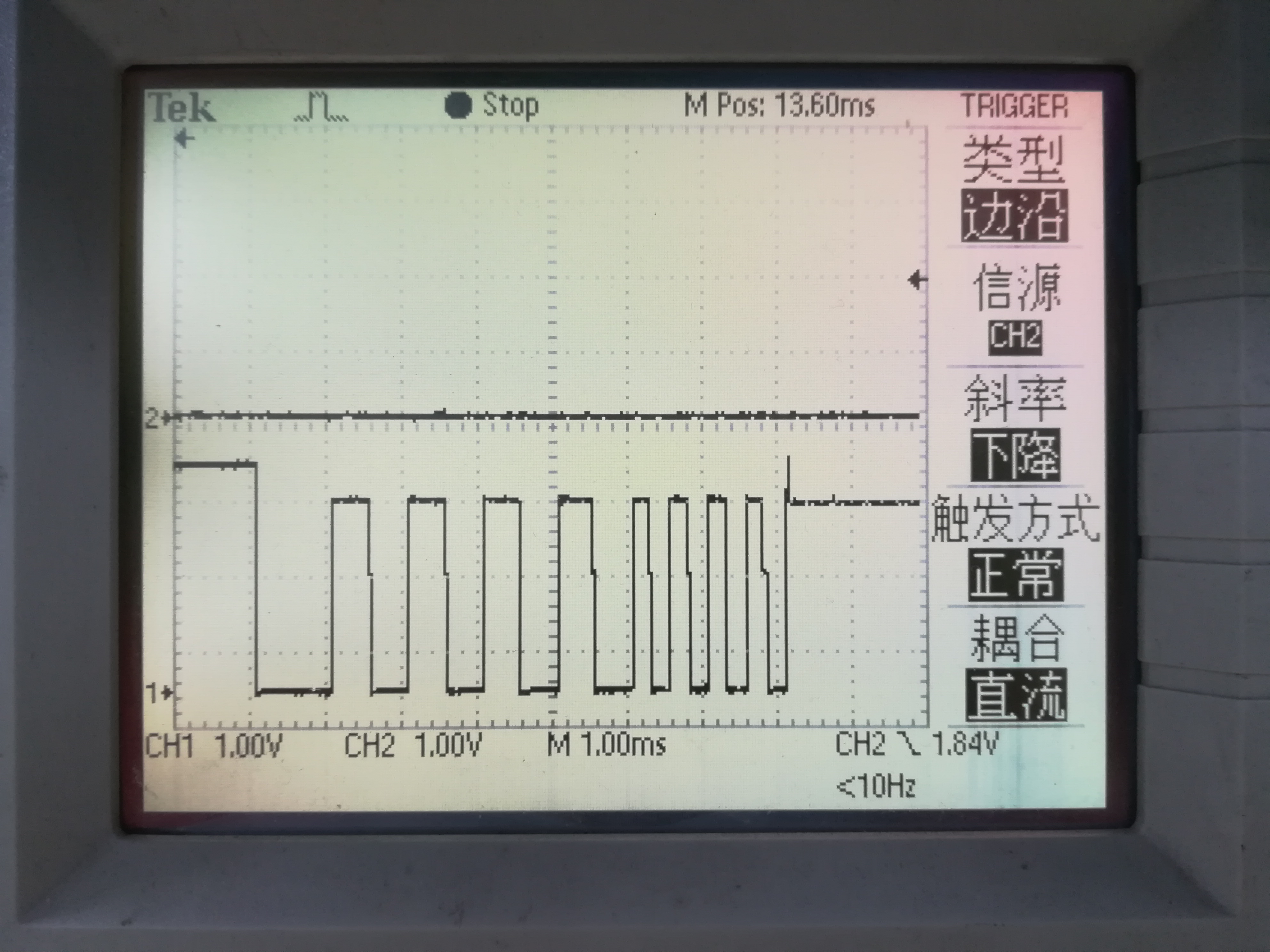
- 带宽和采样率比较低的示波器,不要高级示波器采集的波形更准确利于开发,如图:
泰克示波器(100M带宽和1G的采样率)截获的激活时序(8个脉冲)和激活后16us的低电平应答(局部放大后显示得不精确)
Tek的示波器在抓波形的时候缩放太大的时候会抓不到有用的高速脉冲,如缩放为每格25ms就抓不到本来应该存在的stm8的应答脉冲(20us高电平过后的,约为16us的低电平才是应答)。
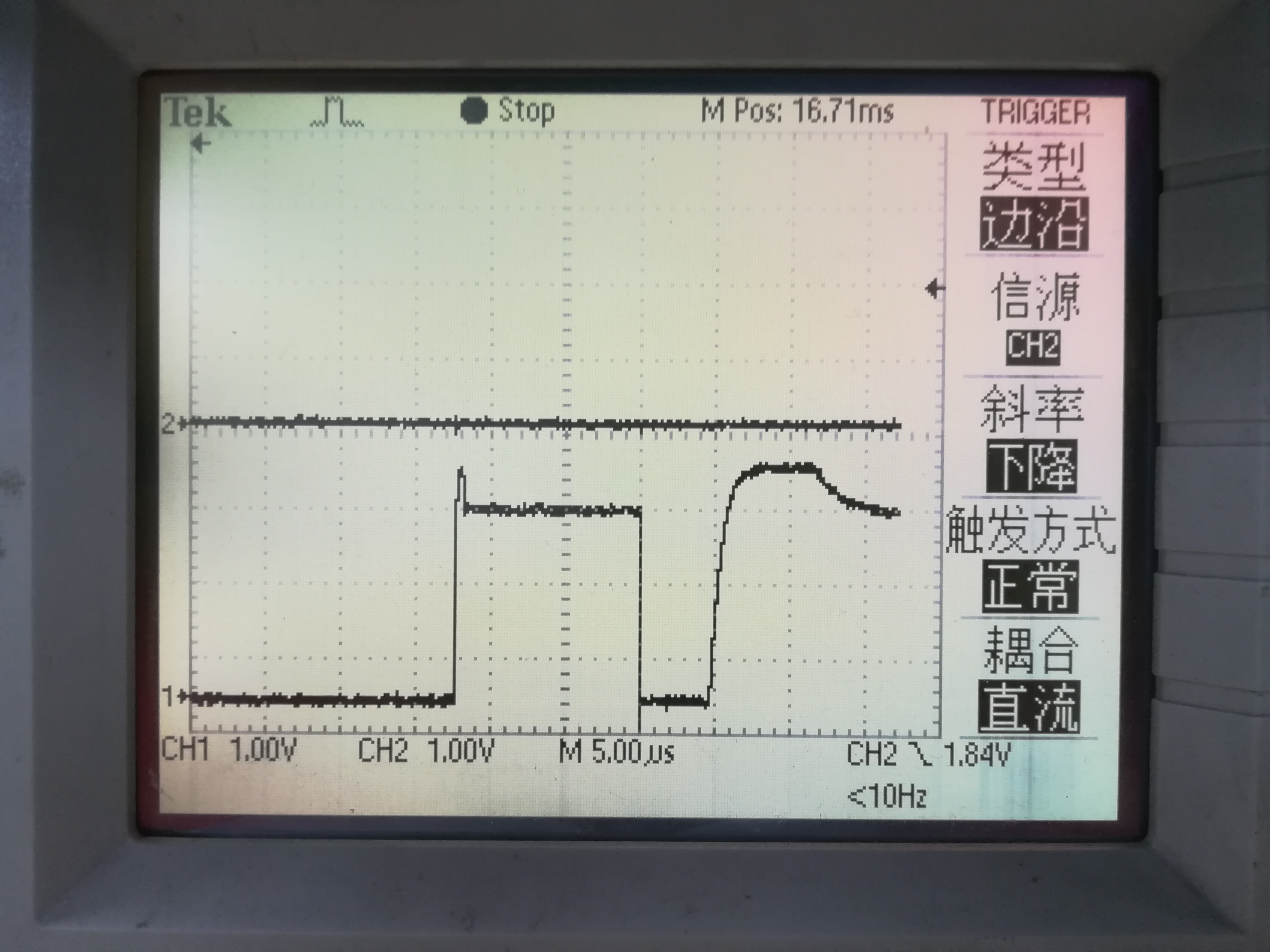
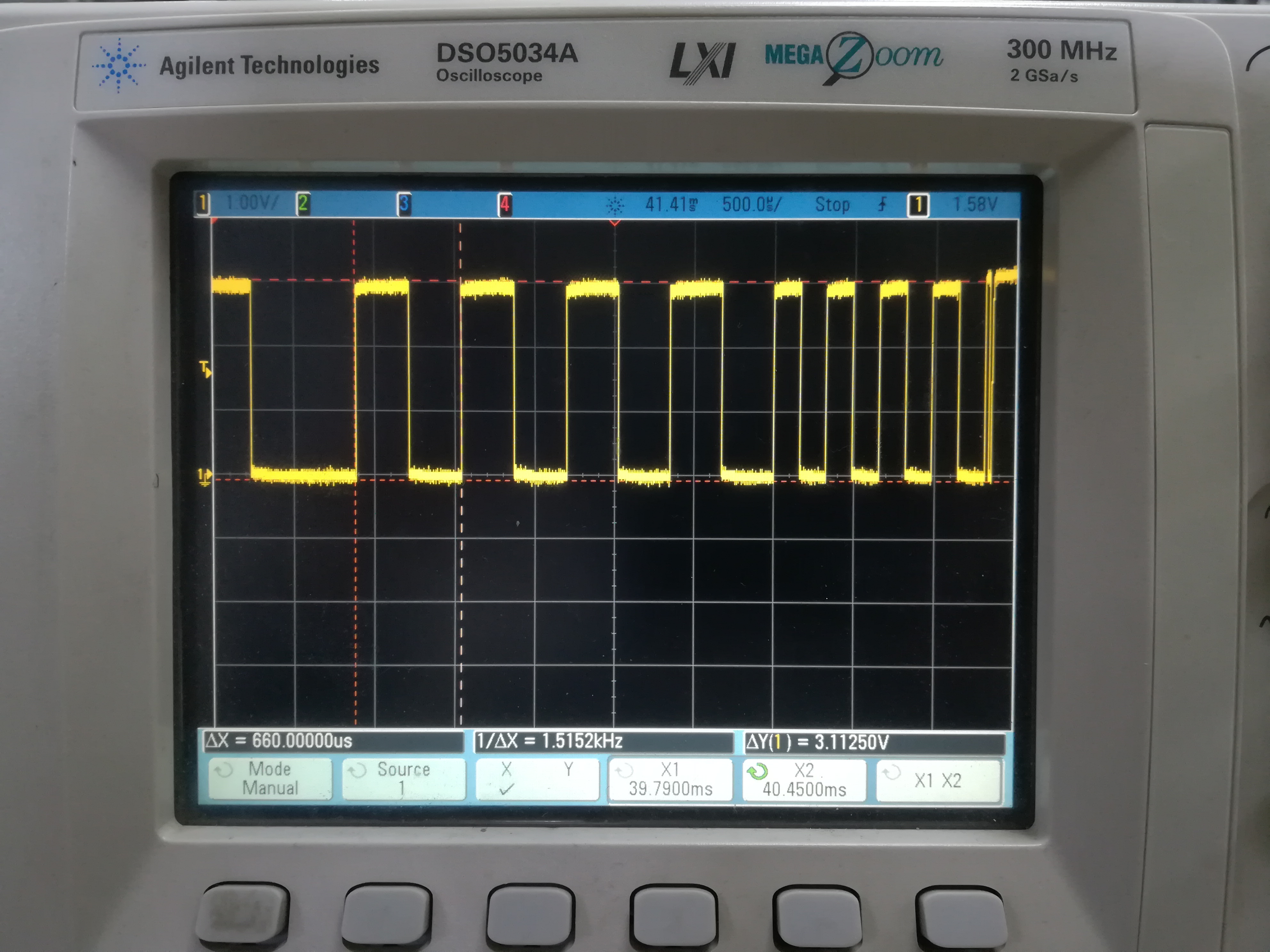
安捷伦(300MHz带宽和2G的采样率)示波器截获的激活时序(8个脉冲)和激活后16us的低电平应答(局部放大后也很精确)
我还能说什么,一分价钱一分货,还好手头有两种示波器,硬件设备够硬才能搞开发。
4)问题4 - 权威
问题情景:
大部分人在遇到问题且一时半会解决不了的时候都会抓狂,项目组其他人鼓动你尝试各种突发奇想。
问题分析和解决
对于别人的意见要思考推敲,不可一票否定别人宝贵建议和意见也不能过于依赖相信同事的个人见解;要依据权威的官方的协议,冷静思考,结合实际情况和大家的经验来调试。
5) 问题5 - 系统已用资源的重复使用
问题情景:
使用Soc上的timer0结合spin_lock_irq使用,锁定Soc定时的时间时和linux系统冲突:(系统出现如下信息)
[ 1032.550012] INFO: rcu_bh detected stalls on CPUs/tasks: { 3} (detected by 0, t=6020 jiffies)
[ 1032.559958] INFO: Stall ended before state dump start
[ 1038.960011] INFO: rcu_preempt detected stalls on CPUs/tasks: { 3} (detected by 0, t=6021 jiffies)
[ 1038.970001] INFO: Stall ended before state dump start
[ 1227.650009] INFO: rcu_bh detected stalls on CPUs/tasks:
[ 1227.656042] INFO: Stall ended before state dump start
[ 1227.660007] INFO: rcu_preempt detected stalls on CPUs/tasks: { 3} (detected by 0, t=24890 jiffies)
[ 1227.660020] INFO: Stall ended before state dump start
[ 1407.850025] INFO: rcu_bh detected stalls on CPUs/tasks: { 3} (detected by 5, t=43550 jiffies)
[ 1407.860012] INFO: Stall ended before state dump start
[ 1407.860012] INFO: rcu_preempt detected stalls on CPUs/tasks: { 3} (detected by 5, t=42910 jiffies)
[ 1407.860012] INFO: Stall ended before state dump start
[ 1588.080030] INFO: rcu_bh detected stalls on CPUs/tasks: { 3} (detected by 4, t=61573 jiffies)
[ 1588.090019] INFO: Stall ended before state dump start
[ 1588.090019] INFO: rcu_preempt detected stalls on CPUs/tasks: { 3} (detected by 4, t=60933 jiffies)
问题分析和解决:
timer已经被系统占用,改用pwm的脉冲来精确计时,达到软件精确延时(纳秒级延时)的目的。
6) 问题6 - STM8的固件的UART通信访问时间问题:
问题情景:
stm8的次命令7执行后需要延时1s后才能响应
问题分析和解决:
这个指令执行时会消耗时间,因为需要操作交换机芯片并等待操作完成,详见STM8固件源码
六、附件
文件
1. EN-STM8_SWIM_Communication_Protocol_And_Debug_Module
2. STM8S_Flash_and_Control_System
3. STM8S_Series_Registers
4. STM8SAnd8AProgrammingManual3.4
七、注意:
- 不足之处还望指正,多多留言
- 如需转载,请注明出处,谢谢~
这篇关于Linux接口驱动03 - SWIM(脱离ST烧录器,单线完美升级STM8的固件,附带总结经验和源代码)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









