本文主要是介绍PotatoPie 4.0 实验教程(29) —— FPGA实现摄像头图像均值滤波处理,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
图像的均值滤波简介
图像均值滤波处理是一种常见的图像处理技术,用于降低图像中噪声的影响并平滑图像。该方法通过在图像中滑动一个固定大小的窗口(通常是一个正方形或矩形),将窗口中所有像素的值取平均来计算窗口中心像素的新值。这种操作会使图像中的高频噪声减弱,并且可以使图像的轮廓变得更加模糊,从而使得图像更加平滑。
图像均值滤波的理论依据是基于局部区域的像素值平均化。当图像中的一个像素值受到噪声的影响时,它的值可能会与其周围像素的值不一致。通过取局部区域像素值的平均,可以有效地减小噪声的影响,从而得到更加平滑的图像。
数学上,对于一个大小为 N×N 的滤波器(通常称为卷积核),图像中的每个像素被替换为其周围 N×N 区域中所有像素值的平均值。滤波器的大小决定了平滑效果的程度,较大的滤波器会导致更大程度的平滑,但可能会损失图像的细节信息。

均值滤波步骤和算法实现
均值滤波是一种常用的图像平滑处理方法,其步骤如下:
-
定义滤波模板: 通常使用一个固定大小的滤波模板(例如3×3或5×5)。
-
对每个像素应用滤波: 将模板中心的像素放置在图像的每个像素位置,并计算模板覆盖的像素的平均值。
-
更新图像值: 将计算得到的平均值作为当前像素的新值。
-
处理图像边界: 对于图像边界的像素,由于模板无法完全覆盖,需要根据特定的策略来处理,例如忽略边界像素、使用镜像边界像素或补零处理等。
-
输出结果: 输出经过均值滤波处理后的图像。
这种滤波方法有助于去除图像中的噪声和细节,使图像变得更加平滑。
python实现图像的均值滤波处理源码
import cv2
import numpy as np
import os
import matplotlib.pyplot as plt# 获取当前脚本所在目录
current_directory = os.path.dirname(os.path.abspath(__file__))# 构建图像文件的完整路径
image_path = os.path.join(current_directory, 'Lena.jpg')# 读取图像
image_in = cv2.imread(image_path)# 将彩色图像转换为灰度图像
image_gray = cv2.cvtColor(image_in, cv2.COLOR_BGR2GRAY)# 获取图像尺寸
row, col = image_gray.shape# 将灰度图像转换为浮点型
image_gray = image_gray.astype(float)# 初始化用于存储均值滤波结果的图像
average_image = np.zeros_like(image_gray)# 对灰度图像应用均值滤波
for i in range(1, row-1):for j in range(1, col-1):average_image[i, j] = (image_gray[i-1, j-1] + image_gray[i-1, j] + image_gray[i-1, j+1] +image_gray[i, j-1] + image_gray[i, j] + image_gray[i, j+1] +image_gray[i+1, j-1] + image_gray[i+1, j] + image_gray[i+1, j+1]) / 9# 添加椒盐噪声到灰度图像
noise_salt_pepper = np.random.choice([0, 1], size=(row, col), p=[0.99, 0.01]) # 进一步降低椒盐噪声密度
image_gray_salt_pepper = image_gray.copy()
image_gray_salt_pepper[noise_salt_pepper == 1] = 255 # 将椒盐噪声点的灰度值设为255# 初始化用于存储均值滤波结果的图像
average_image_salt_pepper = np.zeros_like(image_gray)# 对添加椒盐噪声后的灰度图像应用均值滤波
for i in range(1, row-1):for j in range(1, col-1):average_image_salt_pepper[i, j] = (image_gray_salt_pepper[i-1, j-1] + image_gray_salt_pepper[i-1, j] + image_gray_salt_pepper[i-1, j+1] +image_gray_salt_pepper[i, j-1] + image_gray_salt_pepper[i, j] + image_gray_salt_pepper[i, j+1] +image_gray_salt_pepper[i+1, j-1] + image_gray_salt_pepper[i+1, j] + image_gray_salt_pepper[i+1, j+1]) / 9# 添加高斯噪声到灰度图像
noise_gaussian = np.random.normal(0, 0.08, (row, col)) # 进一步降低高斯噪声的强度
image_gray_gaussian = image_gray + noise_gaussian * 255
image_gray_gaussian = np.clip(image_gray_gaussian, 0, 255)# 初始化用于存储均值滤波结果的图像
average_image_gaussian = np.zeros_like(image_gray)# 对添加高斯噪声后的灰度图像应用均值滤波
for i in range(1, row-1):for j in range(1, col-1):average_image_gaussian[i, j] = (image_gray_gaussian[i-1, j-1] + image_gray_gaussian[i-1, j] + image_gray_gaussian[i-1, j+1] +image_gray_gaussian[i, j-1] + image_gray_gaussian[i, j] + image_gray_gaussian[i, j+1] +image_gray_gaussian[i+1, j-1] + image_gray_gaussian[i+1, j] + image_gray_gaussian[i+1, j+1]) / 9# 显示原始灰度图像和均值滤波后的图像
plt.figure(figsize=(12, 10))plt.subplot(3, 2, 1)
plt.imshow(image_gray, cmap='gray')
plt.title('Original Gray Image')plt.subplot(3, 2, 2)
plt.imshow(average_image, cmap='gray')
plt.title('Average Image')plt.subplot(3, 2, 3)
plt.imshow(image_gray_salt_pepper, cmap='gray')
plt.title('Salt & Pepper Image')plt.subplot(3, 2, 4)
plt.imshow(average_image_salt_pepper, cmap='gray')
plt.title('Average Salt & Pepper Image')plt.subplot(3, 2, 5)
plt.imshow(image_gray_gaussian, cmap='gray')
plt.title('Gaussian Image')plt.subplot(3, 2, 6)
plt.imshow(average_image_gaussian, cmap='gray')
plt.title('Average Gaussian Image')plt.tight_layout()
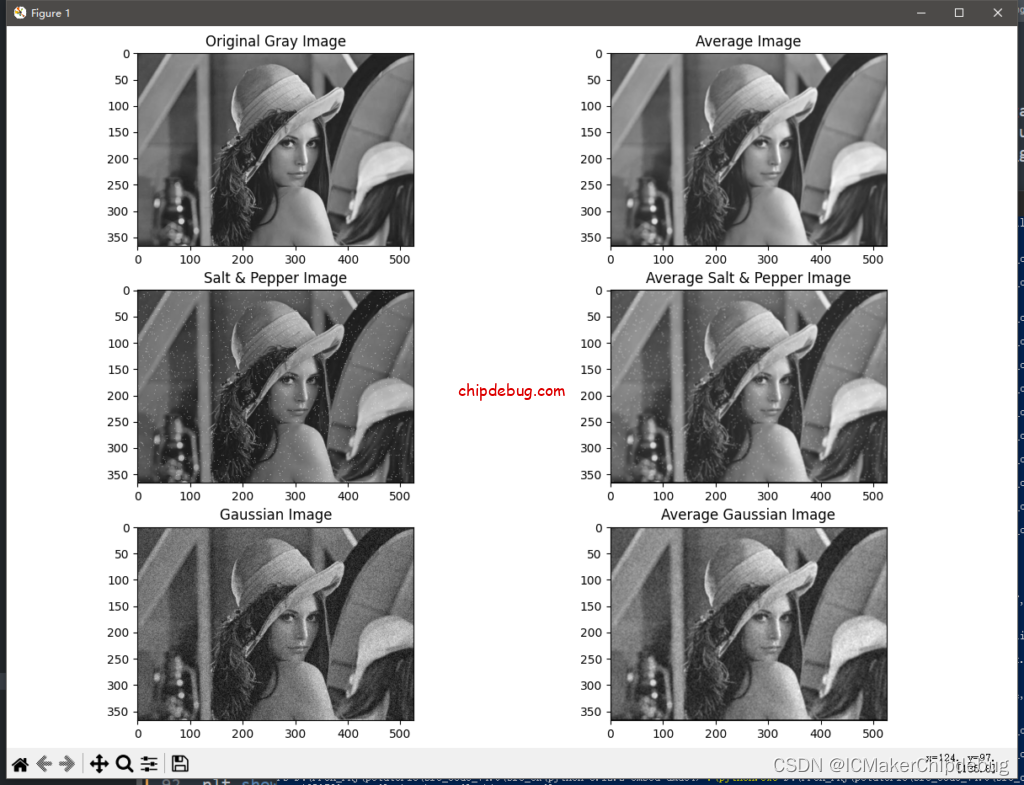
plt.show()这段代码实现了以下功能:
- 读取一张彩色图像并将其转换为灰度图像。
- 对灰度图像应用均值滤波,以平滑图像并降低噪声。
- 添加了椒盐噪声到灰度图像中,模拟图像中的随机噪声。
- 对添加了椒盐噪声的灰度图像应用均值滤波,以降低椒盐噪声对图像的影响。
- 添加了高斯噪声到灰度图像中,模拟图像中的连续噪声。
- 对添加了高斯噪声的灰度图像应用均值滤波,以降低高斯噪声对图像的影响。
- 显示原始灰度图像、均值滤波后的图像、添加椒盐噪声后的图像、添加高斯噪声后的图像以及它们各自的均值滤波结果。
这段代码可以用于图像处理中的噪声去除和平滑处理。
MATLAB实现图像的均值滤波处理源码
clear; % 清空工作区变量
clear all; % 清除所有变量
clc; % 清空命令窗口% 获取当前脚本所在目录
current_directory = fileparts(mfilename('fullpath'));% 构建图像文件的完整路径
image_path = fullfile(current_directory, 'Lena.jpg');% 读取图像
image_in = imread(image_path);% 将彩色图像转换为灰度图像
image_gray = rgb2gray(image_in);% 获取图像尺寸
[row,col] = size(image_gray);% 将灰度图像转换为双精度类型
image_gray = im2double(image_gray); % 初始化用于存储均值滤波结果的图像
average_image = zeros(row,col);% 对灰度图像应用均值滤波
for i = 2:1:row-1for j = 2:1:col-1average_image(i,j) = (...image_gray(i-1,j-1) + image_gray(i-1,j) + image_gray(i-1,j+1) + ...image_gray(i,j-1) + image_gray(i,j) + image_gray(i,j+1) + ...image_gray(i+1,j-1) + image_gray(i+1,j) + image_gray(i+1,j+1)) / 9;end
end% 添加椒盐噪声到灰度图像
image_gray_salt_pepper = imnoise(image_gray,'salt & pepper',0.05);
image_gray_salt_pepper = im2double(image_gray_salt_pepper); % 初始化用于存储均值滤波结果的图像
average_image_salt_pepper = zeros(row,col);% 对添加椒盐噪声后的灰度图像应用均值滤波
for i = 2:1:row-1for j = 2:1:col-1average_image_salt_pepper(i,j) = (...image_gray_salt_pepper(i-1,j-1) + image_gray_salt_pepper(i-1,j) + image_gray_salt_pepper(i-1,j+1) + ...image_gray_salt_pepper(i,j-1) + image_gray_salt_pepper(i,j) + image_gray_salt_pepper(i,j+1) + ...image_gray_salt_pepper(i+1,j-1) + image_gray_salt_pepper(i+1,j) + image_gray_salt_pepper(i+1,j+1)) / 9;end
end% 添加高斯噪声到灰度图像
image_gray_gaussian = imnoise(image_gray,'gaussian',0.05);
image_gray_gaussian = im2double(image_gray_gaussian); % 初始化用于存储均值滤波结果的图像
average_image_gaussian = zeros(row,col);% 对添加高斯噪声后的灰度图像应用均值滤波
for i = 2:1:row-1for j = 2:1:col-1average_image_gaussian(i,j) = (...image_gray_gaussian(i-1,j-1) + image_gray_gaussian(i-1,j) + image_gray_gaussian(i-1,j+1) + ...image_gray_gaussian(i,j-1) + image_gray_gaussian(i,j) + image_gray_gaussian(i,j+1) + ...image_gray_gaussian(i+1,j-1) + image_gray_gaussian(i+1,j) + image_gray_gaussian(i+1,j+1)) / 9;end
end% 显示原始灰度图像和均值滤波后的图像
figure
subplot(321);
imshow(image_gray), title('原始灰度图像');
subplot(322);
imshow(average_image), title('均值滤波后的图像');
subplot(323);
imshow(image_gray_salt_pepper), title('添加椒盐噪声后的灰度图像');
subplot(324);
imshow(average_image_salt_pepper), title('添加椒盐噪声后的均值滤波图像');
subplot(325);
imshow(image_gray_gaussian), title('添加高斯噪声后的灰度图像');
subplot(326);
imshow(average_image_gaussian), title('添加高斯噪声后的均值滤波图像');这段代码实现了图像的均值滤波处理,具体功能如下:
-
清空工作区变量和命令窗口:
clear、clear all、clc函数用于清空工作区变量和命令窗口,确保工作环境清晰。 -
获取当前脚本所在目录:
fileparts、mfilename和fullpath函数用于获取当前脚本所在的目录,并通过fullfile函数构建图像文件的完整路径,以便读取图像文件。 -
读取图像:
imread函数读取名为”Lena.jpg”的图像文件,并将图像数据存储在变量image_in中。 -
转换为灰度图像:
rgb2gray函数将彩色图像转换为灰度图像,以便后续处理。 -
获取图像尺寸:
size函数获取灰度图像的尺寸,包括行数和列数。 -
转换为双精度类型:
im2double函数将灰度图像转换为双精度类型,以便进行数学运算。 -
初始化存储均值滤波结果的图像矩阵: 创建一个与输入图像大小相同的矩阵
average_image,用于存储均值滤波后的图像。 -
应用均值滤波: 使用两层嵌套的循环遍历图像中的每个像素,并对其应用3×3的均值滤波模板,得到均值滤波后的像素值。
-
添加噪声并进行均值滤波处理: 将灰度图像分别添加了椒盐噪声和高斯噪声,并对噪声图像分别进行均值滤波处理。
-
显示结果图像: 将原始灰度图像和三种处理后的图像(原始灰度图像、椒盐噪声+均值滤波、高斯噪声+均值滤波)以子图形式展示在一个大图中。

FPGA工程分析
工程层次图
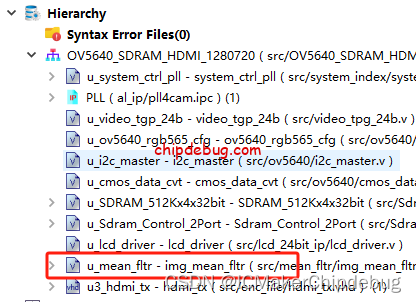
与demo18相比,只是多了一个img_mean_fltr的模块,也就是下面这一段代码,在从SDRAM读出来之后,经它处理后再输出hdmi_tx模块。
img_mean_fltr u_mean_fltr
(.i_clk(clk_pixel),.i_rst_n(sys_rst_n),.i_hs(VGA_HS),.i_vs(VGA_VS),.i_de(VGA_DE),.i_r(VGA_RGB[23:16]),.i_g(VGA_RGB[15:8] ),.i_b(VGA_RGB[7:0] ), .o_hs(mean_hs),.o_vs(mean_vs),.o_de(mean_de), .o_r(mean_data[23:16]),.o_g(mean_data[15:8] ),.o_b(mean_data[7:0] )
);img_mean_fltr模块代码分析
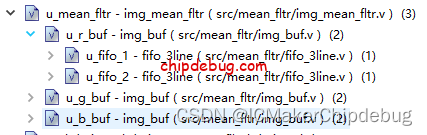
从层次图可以看到这个模块的结果跟前面的 《PotatoPie 4.0 实验教程(28) —— FPGA实现sobel算子对摄像头图像进行边缘提取》整体结构是一样的。
首先例化图像缓冲模块,用于将图像从一个时钟一个像素转为一个时钟输出三行三列9个像素。以R通道为例
img_buf u_r_buf
(.i_clk (i_clk ),.i_rst_n (i_rst_n ),.i_de (i_de ),.i_data (i_r ),.o_de ( ),.o_p11 (r_p11 ),.o_p12 (r_p12 ),.o_p13 (r_p13 ), .o_p21 (r_p21 ),.o_p22 (r_p22 ),.o_p23 (r_p23 ), .o_p31 (r_p31 ),.o_p32 (r_p32 ),.o_p33 (r_p33 )
);代码后面又分别对G、B通道进行了行缓存的例化。
然后计算中心像素周围的另外8个像素的和,以R通道为例,
sum_r <= r_p11 + r_p12 + r_p13 + r_p21 + r_p23 + r_p31 + r_p32 + r_p33;
最后进行求平均值处理,右移3就相当于除以8。
avg_r <= sum_r >> 3;
管脚约束
与PotatoPie 4.0 实验教程(18) —— FPGA实现OV5640摄像头采集以SDRAM作为显存进行HDMI输出显示相同,不作赘述。
时序约束
与PotatoPie 4.0 实验教程(18) —— FPGA实现OV5640摄像头采集以SDRAM作为显存进行HDMI输出显示相同,不作赘述。
实验效果
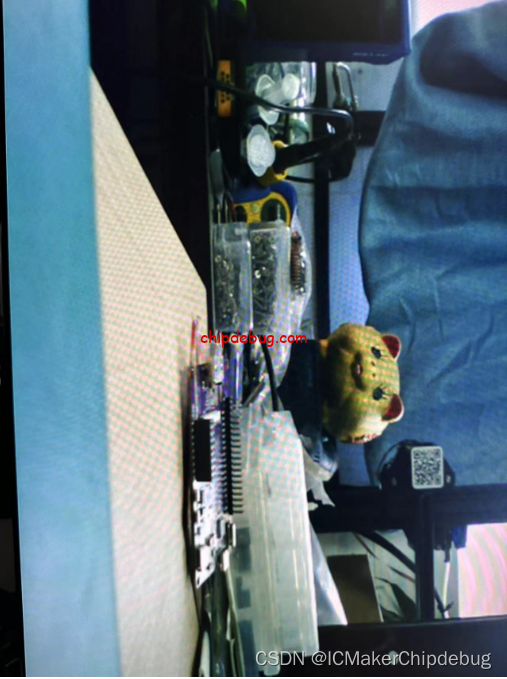
这篇关于PotatoPie 4.0 实验教程(29) —— FPGA实现摄像头图像均值滤波处理的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






