本文主要是介绍大象机器人开源六轴协作机械臂myCobot 320 手机摄影技术!,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
引言
有没有遇到过这样的情况:当你手持手机或相机准备拍摄视频时,心中已经构想了完美的画面,但却因为实际的限制无法捕捉到理想中的角度?这种情况可能会让人感到挫折。例如,如果想要从地面一只蚂蚁的视角拍摄,镜头需要与蚂蚁处于同一水平线上,这在操作上不仅困难,而且往往难以实现。
尽管目前市场上有许多稳定设备如平衡环架(gimbal)来辅助拍摄,以求达到稳定和多角度的拍摄效果,但在此篇文章中,我将探索一种独特的解决方案:通过将手机安装在机械臂的末端来进行拍摄,以实现那些传统方法难以捕捉的特殊视角。此次尝试不仅旨在克服拍摄过程中的物理限制,而且也期望通过技术的创新来开拓我们对摄影角度的想象和实践。
设备
myCobot 320 M5stack
myCobot 320,一款具备六自由度的协作型机械臂,凭借其独特的设计和高精度伺服电机成为了领域内的亮点。这款机械臂拥有最大350mm的工作半径和最大1000g的末端负载能力,使其适用于广泛的应用场景。myCobot 320不仅支持灵活的视觉开发应用,还提供了深入的机械运动原理解析,为用户带来了12个标准的24V工业IO接口,满足不同的开发需求。
它的开放性极高,兼容大多数主流操作系统和编程语言,包括Python和ROS等,为开发者提供了极大的灵活性和自由度。无论是在教育、研发还是工业应用中,myCobot 320都能提供强大支持,使创新和应用开发更加便捷高效。
myCobot Pro phone holder
它可以安装在myCobot 320,myCobot pro 630机械臂的末端,能够稳定的固定住手机。


以上就是我们需要使用到的设备了。
初次尝试
安装手机支架
整体安装的效果图片

基础控制测试
做一个简单的尝试。
拍摄视频
给机械臂进行关节控制的编程,让我们一起看看效果如何。
尽管视频中展示的机械臂运动轨迹看似简单,但实际上,调整这些轨迹点位仍需耗费大量时间,且效果未必理想。因此,我在考虑是否存在更优解决方案,例如,通过设定几种运动模式和预先规划机械臂的拍摄路径。这不仅能够有效利用机械臂辅助拍摄,同时也提供了一种更为高效的部署方式。
编程挑战
开发需求分析
确定使用的设备如下
| 产品 | 功能 | 备注 |
| myCobot 320 M5Stack | 整个项目的核心搭载手机进行拍摄。 | |
| myCobot Pro Phone Holder | 在机械臂的末端安装,能够保持手机的稳定 | |
| Smart Phone | 进行拍摄的设备 | ios或者,安卓系统的手机 |
| Computer | 编写代码,控制机械臂,调动程序 |
需求:需求优化:
目标是为静态物体拍摄场景设计一系列创新的视频拍摄方式,初步计划采用三种方法:
1. 利用机械臂末端固定的手机,实现物体360°全景视频拍摄。
2. 创建一种画面效果,从远处平缓推进至物体近前,模拟“拉近镜头”的效果。
3. 实现机械臂末端的快速旋转与移动,捕捉动感十足的画面。
为了精准控制拍摄过程,计划利用OpenCV机器视觉算法和AVFoundation iOS框架,通过Python脚本控制机械臂的精确运动。我们将通过手机摄像头识别物体的尺寸,进而计算出机械臂末端与物体之间的理想距离。根据这个距离,设计相应的机械臂运动算法,确保拍摄过程中能够获得最佳画面效果。

YOLO视觉算法
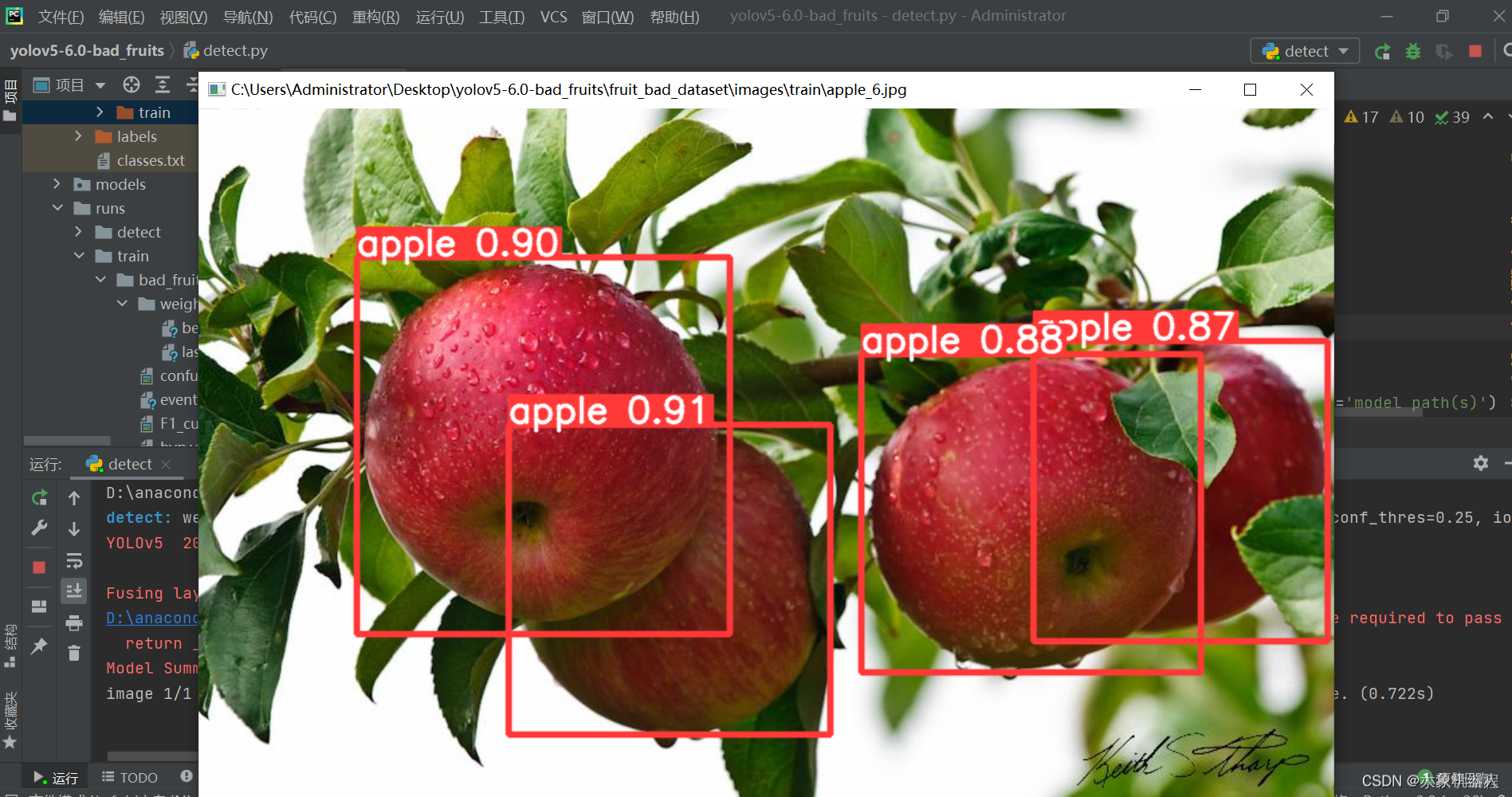
为了节省时间,我们将不会自行训练机器视觉算法来识别特定物体。相反,我们直接采用其他开发者已经训练优化的YOLOv5库,以实现对目标物体的准确检测。
import cv2
import torch
from pathlib import Path
from models.experimental import attempt_load
from utils.general import non_max_suppression, scale_coords
from utils.torch_utils import select_device, time_synchronizeddef detect_apples(img_path):device = select_device('')weights = 'yolov5s.pt'model = attempt_load(weights, map_location=device)img0 = cv2.imread(img_path) # BGRimg = img0[:, :, ::-1] # RGBimg = torch.from_numpy(img).to(device)img = img.float() # uint8 to fp16/32img /= 255.0 # 0 - 255 to 0.0 - 1.0if img.ndimension() == 3:img = img.unsqueeze(0)# Inferencet1 = time_synchronized()pred = model(img)[0]# Apply NMSpred = non_max_suppression(pred, 0.4, 0.5, classes=None, agnostic=False)t2 = time_synchronized()print(f'Inference time: {(t2 - t1):.3f}s')# Process detectionsfor i, det in enumerate(pred): # detections per imagegn = torch.tensor(img0.shape)[[1, 0, 1, 0]] # normalization gain whwhif len(det):det[:, :4] = scale_coords(img.shape[2:], det[:, :4], img0.shape).round()for *xyxy, conf, cls in reversed(det):label = f'{model.names[int(cls)]} {conf:.2f}'plot_one_box(xyxy, img0, label=label, color=(255, 0, 0))return img0def plot_one_box(xyxy, img, color=None, label=None, line_thickness=None):# Plots one bounding box on image imgtl = (line_thickness or round(0.002 * max(img.shape[0:2])) + 1) # line/font thicknesscolor = color or [random.randint(0, 255) for _ in range(3)]c1, c2 = (int(xyxy[0]), int(xyxy[1])), (int(xyxy[2]), int(xyxy[3]))cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)if label:tf = max(tl - 1, 1) # font thicknesst_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filledcv2.putText(img,label,(c1[0], c1[1] - 2),0,tl / 3,[225, 255, 255],thickness=tf,lineType=cv2.LINE_AA,)return imgif __name__ == '__main__':img_path = 'test_image.jpg' # 输入你的图像路径result_img = detect_apples(img_path)cv2.imshow('Result', result_img)cv2.waitKey(0)cv2.destroyAllWindows()
保留识别物体的尺寸的数据,之后要用在别的地方上。
机械臂运动控制算法
机械臂的控制方法
# 这个方法控制机械臂的关节进行运动
mc.send_angles([angle_list],speed)# 这个方法用坐标控制机械臂在空间上进行运动
mc.send_coords([coords_list],speed,mode)example:
mc.send_angles([0,0,0,0,0,0],100)
time.sleep(2)
mc.send_coords([(-3.6), 30.32, (-45.79), (-46.84), 97.38, 0.35],100,1)获得物体的尺寸数据之后,定义机械臂末端距离物体的合理位置
def calculate_angles_for_distance(distance):# 根据理想距离计算机械臂的关节角度# 这里的计算需要根据实际情况和物理参数进行调整return [0, -10, distance * 0.1, 0, 30, 0] def calculate_adjusted_angles(action_angles):# 基于特定动作后可能需要的坐标调整计算新的角度# 这里仅为示例,具体逻辑根据需要调整return [angle * 1.1 for angle in action_angles] 再选择模式对应的运动控制
#360全景拍摄
# 定义具体的拍摄模式
def shoot_mode_360(ideal_distance):print("执行360°全景拍摄模式")# 首先,移动到理想拍摄位置move_to_ideal_position(ideal_distance)# 处理理想距离ideal_ratio = ratio# 执行360°全景拍摄的特定动作mc.send_angles([0, 0, 0, 0, 0, 0], speed=15)time.sleep(1)mc.send_coords([angle * ratio for angle in angles_list]
,15)time.sleep(1)mc.send_coords([angle * ratio for angle in angles_list]
,15)time.sleep(1)mc.send_coords([angle * ratio for angle in angles_list]
,15)手机相机的调用
在开发过程中,尝试调用手机摄像头接口以实现自动化拍摄功能,我遇到了一系列挑战。作为我的第一次深入探索AVFoundation iOS框架,目标是激活并控制手机的摄像头,我发现自己还未能完全成功实现这一功能。当前的难点主要集中在如何准确调用摄像头进行视频拍摄,以及在拍摄过程中如何通过软件调整来补偿图像的可能拉伸,这需要对机械臂的运动进行精细控制。
这些问题标志着我后续研究的重点方向,需要我继续深入学习AVFoundation框架的使用,特别是其控制摄像头的具体方法,并探索如何将这些控制整合到机械臂的运动调整中,以确保最终拍摄出的视频质量符合预期。
总结
随着这次项目记录的结束,我意识到虽然项目尚有诸多不足,但这次尝试将两个独立设备在不同的框架下协同工作,对我来说仍是一次宝贵的经验。确实,整个项目目前尚未达到我心中的理想状态。然而,我认为这个项目探索的方向极具潜力,考虑到市面上已经存在能够拍摄出令人赞叹效果的专业摄影机械臂,这强化了我对项目潜在价值的信念。
机械臂的应用已经广泛渗透到我们的日常生活中,无论是在工业生产、日常服务,还是在艺术创作领域,都发挥着越来越重要的作用。随着人工智能技术的不断进步和普及,AI与机器人的结合无疑将成为未来技术发展的重要趋势。我对机器人技术的未来发展抱有极大的期待,相信未来它们将在更多领域发挥出惊人的能力和创造力。
如果你对我的项目感兴趣,或者有任何想法和建议,非常欢迎与我交流。你的反馈将对我继续改进和完善这个项目提供宝贵的帮助。
这篇关于大象机器人开源六轴协作机械臂myCobot 320 手机摄影技术!的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






