六轴专题
MEMS六轴陀螺仪工作原理介绍
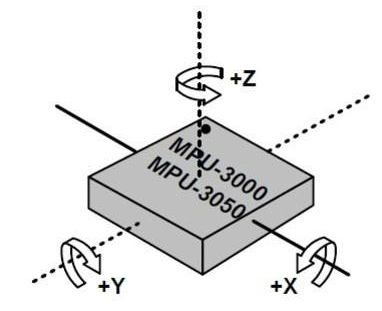
MEMS(微机电系统)六轴陀螺仪主要包括三轴陀螺仪和三轴加速度计,以下是其工作原理的简要介绍: 三轴陀螺仪工作原理: 陀螺仪利用科里奥利力原理来测量角速度。它通常有一个可振动的质量块,当物体绕着某个轴旋转时,质量块在旋转坐标系中会受到科里奥利力的作用而产生位移或振动。通过检测这种位移或振动的变化,就可以测量出相应轴上的角速度。每个轴上

ICM-42607六轴传感器WOM模式配置
ICM-42607支持配置WOM模式,检测到加速度变化后在中断引脚触发跳沿信号。具体配置方式如下: 1、首先实现几个读写寄存器的函数: #define ONE_G 9.807f#define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz)#define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz)#define GYRO_CON

C语言 | 基于MPU605(六轴传感器)的I2C实现LCD1602显示(代码类)
博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 基于MPU605(六轴传感器)的I2C实现LCD1602显示: #include <REG52.H>#include <math.h> //Keil library #include <stdio.h> //Kei
解决陀螺仪角度漂移问题 三轴陀螺仪和六轴陀螺仪的区别
陀螺仪角度漂移是指在使用陀螺仪时,由于各种误差和不完美的因素导致测量的角度随时间发生偏移。为了解决陀螺仪角度漂移问题,可以考虑以下几种方法:1.零位校准(Zero Calibration):陀螺仪在使用前可以进行零位校准,即在没有角速度输入时,将测量值归零。通过定期进行零位校准,可以减少角度漂移的影响。2.温度补偿(Temperature Compensation):陀螺仪的性能受环境温度的影响较
大象机器人开源六轴协作机械臂myCobot 320 手机摄影技术!
引言 有没有遇到过这样的情况:当你手持手机或相机准备拍摄视频时,心中已经构想了完美的画面,但却因为实际的限制无法捕捉到理想中的角度?这种情况可能会让人感到挫折。例如,如果想要从地面一只蚂蚁的视角拍摄,镜头需要与蚂蚁处于同一水平线上,这在操作上不仅困难,而且往往难以实现。 尽管目前市场上有许多稳定设备如平衡环架(gimbal)来辅助拍摄,以求达到稳定和多角度的拍摄效果,但在此篇文章中,我将探

用于自动驾驶,无人驾驶领域的IMU六轴陀螺仪传感器:M-G370
用于自动驾驶,无人驾驶的IMU惯导模块六轴陀螺仪传感器:M-G370。自2020年,自动驾驶,无人驾驶已经迎来新突破,自动驾驶汽车作为道路交通体系的一员,要能做到的就是先判断周边是否有障碍物,自身的行驶是否会对其他交通参与成员产生危险。这就需要所谓的定位导航。而定位导航的关键就在于汽车中的IMU惯导模块。那么为什么说惯导模块是自动驾驶,无人驾驶的安全防线呢?什么样的惯导模块用于自动驾驶和无人驾驶是
爱普生M-G365/M-G366 MEMS六轴陀螺仪替代光纤陀螺仪
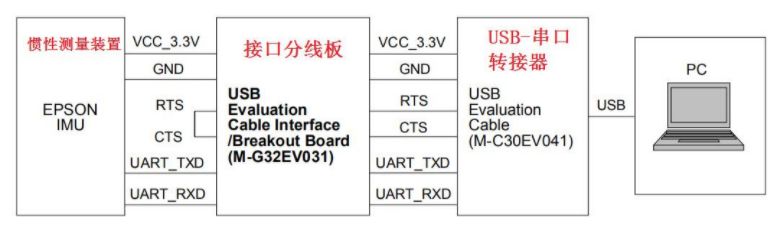
爱普生M-G365/M-G366是一款性能达到光纤陀仪(FOG)级别的高性能性测量装置,作为新一代IMU标准,安装简单,具有新的姿态角输出功能并支持各种应用,并且具有扩展卡尔曼滤波器的高速DSP能以较低功耗提供高精度实时姿态角输出(横滚角/俯仰角/偏航角),可广泛适用于汽车等车辆、船只及其他多种工业产品和系统。用来测量数据和控制运动等,而且系统端不再需要动态姿态角的高速计算,从而减小了系统载荷和功
结合大象机器人六轴协作机械臂myCobot 280 ,解决特定的自动化任务和挑战!(下)
Limo Pro 小车建图导航 引言 前景提要:我们在上文介绍了使用LIMO cobot 实现一个能够执行复杂任务的复合机器人系统的应用场景的项目,从以下三个方面:概念设计、系统架构以及关键组件。 本文主要深入项目内核的主要部分,同样也主要分为三个部分:机械臂的视觉抓取,LIMO Pro在ROS中的功能,建图导航避障等,以及两个系统的集成。 设备准备 myCobot 280 M5stackm
Qt5 基于OpenGL实现六轴机械臂三维仿真
需求 在Qt中通过OPenGL方式加载三维模型STL文件,然后将多个结构的STL文件类型的模型进行组装,形成6轴机械臂三维模型的显示,并且可以对每个关节进行关节角度的控制。 新建一个C++类STLFileLoader,用于加载STL文件,并进行文件解析。 直接通过QT的QFile类进行文件读取,然后通过判断STL的格式进行文件解析,一种是ASCII格式stl文件,一种是二进制格式stl
使用ChatGPT学习大象机器人六轴协作机械臂mechArm
引言 我是一名机器人方向的大学生,近期学校安排自主做一个机器人方面相关的项目。学校给我们提供了一个小型的六轴机械臂,mechArm 270M5Stack,我打算使用ChatGPT让它来辅助我学习如何使用这个机械臂并且做一个demo。 本篇文章将记录我是如何使用ChatGPT来学习机械臂的使用。 ChatGPT ChatGPT 是由 OpenAI 开发的一个先进的人工智能对话系统。它基于大规

nRF52832-Bluefruit52学习之外设开发(1)-- MPU6050六轴模块
nRF52832技术交流群:680723714 nRF52832-Bluefruit52核心板详细介绍: https://blog.csdn.net/solar_Lan/article/details/88688451 nRF52832驱动MPU6050
LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统 本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色。 系统研究与算法开发:首先,项目围绕机器人的数学模型,特别是空间位姿描述和D-H模型展开研究。在此基础上,开发了机器人的运动学正反解算法,使用了雅克比-迭代法等先进技术。此外,还涉及了机器人任务空间和关节
LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统 本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色。 系统研究与算法开发:首先,项目围绕机器人的数学模型,特别是空间位姿描述和D-H模型展开研究。在此基础上,开发了机器人的运动学正反解算法,使用了雅克比-迭代法等先进技术。此外,还涉及了机器人任务空间和关节
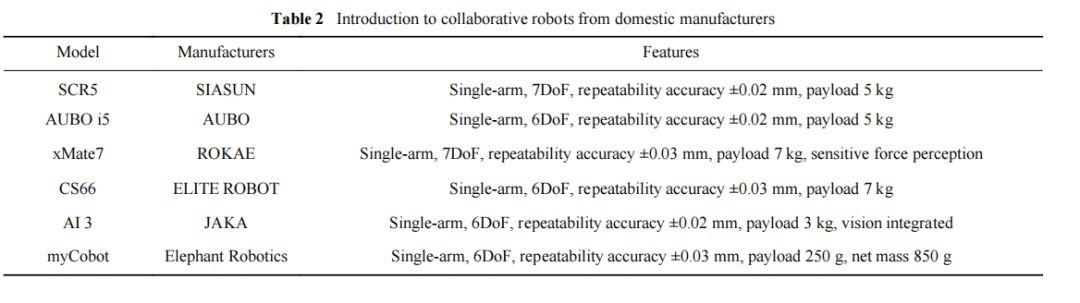
看完这8篇论文,你会完全掌握桌面六轴协作机器人
协作机器人(collaborative robot)简称cobot或co-robot,是设计和人类在共同工作空间中有近距离互动的机器人,是人类和电脑控制的通用机器人之间的直接物理互动的设备。 协作机器人的机能包括了和人类近距离互动合作、对周围人类进行安全保护。 今天,给大家推荐一些协作机器人的论文,这些论文均来自国内外各所知名高校,这8篇论文资料,主要使用的产品是桌面六轴协作机器人my

六轴机器人matlab写运动学逆解函数(改进DH模型)
1.理论 本文采用的模型为之前博客“matlab机器人工具箱一般六轴的DH模型和改进DH模型建立与区别”里面的改进DH模型,参数不再重复给出。 基系与工具坐标系关系为: bT0⋅(0T1⋅1T2⋅2T3⋅3T4⋅4T5⋅5T6)⋅6Te=bTe b T 0 ⋅ ( 0 T 1 ⋅ 1 T 2 ⋅ 2 T 3 ⋅ 3 T 4 ⋅ 4 T 5 ⋅ 5 T 6 ) ⋅ 6 T e = b T
开源六轴协作机械臂MechArm 拖动示教模型案例
介绍 今天,我将向大家展示一个我独立设计并实现的机械臂模型。这个模型的核心功能是实现实时的手势追踪——只需用手轻轻拖拽,机械臂就能立即跟随你的动作进行移动。 我之所以想要创造这样一个模型,是因为在一些危险环境中,我们可以用机械臂来代替人工进行作业,从而避免人员的生命安全受到威胁。 你可能会问,为什么不直接使用远程的键盘控制、手柄控制或者APP控制,而要选择手动拖拽的方式呢?我觉得只有手动操
开源六轴机械臂myCobot 280末端执行器实用案例解析
Intrduction 大家好,今天这篇文章的主要内容是讲解以及使用一些myCobot 280 的配件,来了解这些末端执行器都能够完成哪些功能,从而帮助大家能够正确的选择一款适合的配件来进行使用。 本文中主要介绍4款常用的机械臂的末端执行器。 Product myCobot 280 M5Stack myCobot 280 系列是世界最小最轻的六轴协作机器人,体积小巧但功能强大,具备丰富的软
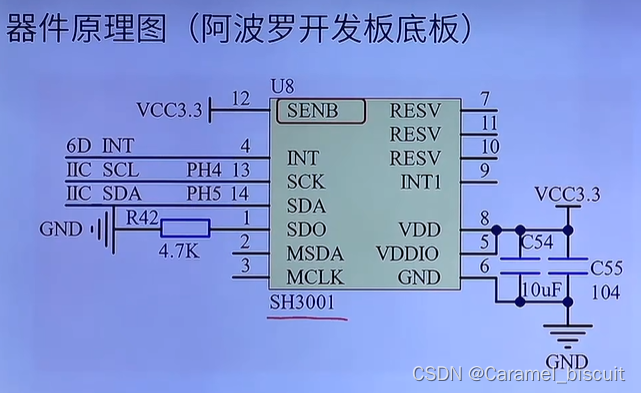
六轴传感器 SH3001
SH3001简介 SH3001是Senodia公司生产的一款六轴姿态传感器,可测量芯片自身X、Y、Z轴的加速度以及角速度参数,通过姿态融合,进而得到姿态角。 三轴加速度计(Accelerometer):测量X、Y、Z轴的加速度。 三轴陀螺仪传感器(Gyroscope):测量X、Y、Z轴的角速度。 小球完全悬空时,对每个面都没有施加力,所以每个方向的加速度都为0. 当物体向x+轴运动,
拉格朗日法建立六轴机器人TX90动力学模型
参考书籍,感谢这本书的作者让我对雅克比矩阵有了更加深刻的认识: 以下是我建模的相关草稿: 草稿有点凌乱,没有整理,详细建模过程可参考以下代码,笔者最后反对称性没有验证出来,可能有地方出问题了,相关代码如下: function [ T ] = Trans( alpha, a, theta, d ) % 变换矩阵T =[