本文主要是介绍结合大象机器人六轴协作机械臂myCobot 280 ,解决特定的自动化任务和挑战!(下),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Limo Pro 小车建图导航
引言
前景提要:我们在上文介绍了使用LIMO cobot 实现一个能够执行复杂任务的复合机器人系统的应用场景的项目,从以下三个方面:概念设计、系统架构以及关键组件。
本文主要深入项目内核的主要部分,同样也主要分为三个部分:机械臂的视觉抓取,LIMO Pro在ROS中的功能,建图导航避障等,以及两个系统的集成。
设备准备
- myCobot 280 M5stack
- myCobot Adaptive Gripper
- myCobot Camera Flange 2.0
- LIMO PRO
机械臂视觉抓取
这是机械臂安装 Adaptive Gripper,和 camera flange 2.0之后的样子。

我们是用的camera flange 2.0是一款2D的相机,他并不能够依靠他相机本身来获取到一个物体的三维(长宽高),但我们可以使用标记物来获得到目标物体的都长宽高。常见的有ArUco,STag,AR码,AprilTags。今天我们用STag算法来做视觉识别。
STag标记系统
STag是一个为了高稳定性和精确的三位定位而设计的标记系统。它特别适用于环境中有遮挡和光照变化的情况。
下面有一个视频展示了STag标记码,ARToolKit+,ArUco,RUNE-Tag码在同一个环境下的识别效果。
https://www.youtube.com/watch?v=vnHI3GzLVrY
可以从视频中看出来STag对环境变化的强大适应性和在复杂场景下的高可靠性,使其成为在要求高精度跟踪和定位的应用中的首选。还有一篇论文专门讲解STag稳定的基准标记系统,感兴趣的可以自己点击链接去了解一下。
https://arxiv.org/abs/1707.06292
STag系统可以是适配与ROS,有ROS软件包,用的是c++编写的,也能够支持python进行使用。
C++/ROS:GitHub - bbenligiray/stag: STag: A Stable Fiducial Marker System
Python:GitHub - ManfredStoiber/stag-python: Python Package for STag - A Stable, Occlusion-Resistant Fiducial Marker System
用python 简单写一个例子
import cv2
import stag
import numpy as np# 加载相机参数
camera_params = np.load("camera_params.npz")
mtx, dist = camera_params["mtx"], camera_params["dist"]# 初始化STag检测器
stag_detector = stag.detectMarkers(mtx, dist)# 初始化视频捕获
cap = cv2.VideoCapture(0)
while cap.isOpened():ret, frame = cap.read()if not ret:break# 应用相机校正(可选)frame_undistorted = cv2.undistort(frame, mtx, dist, None, mtx)# 检测STag标记(corners, ids, rejected_corners) = stag.detectMarkers(frame_undistorted, 21)# 绘制检测到的标记及其IDstag.drawDetectedMarkers(frame_undistorted, corners, ids)# 绘制被拒绝的候选区域,颜色设为红色stag.drawDetectedMarkers(frame_undistorted, rejected_corners, border_color=(255, 0, 0))# 显示结果cv2.imshow("STag Detection", frame_undistorted)if cv2.waitKey(1) & 0xFF == ord('q'):breakcap.release()
cv2.destroyAllWindows()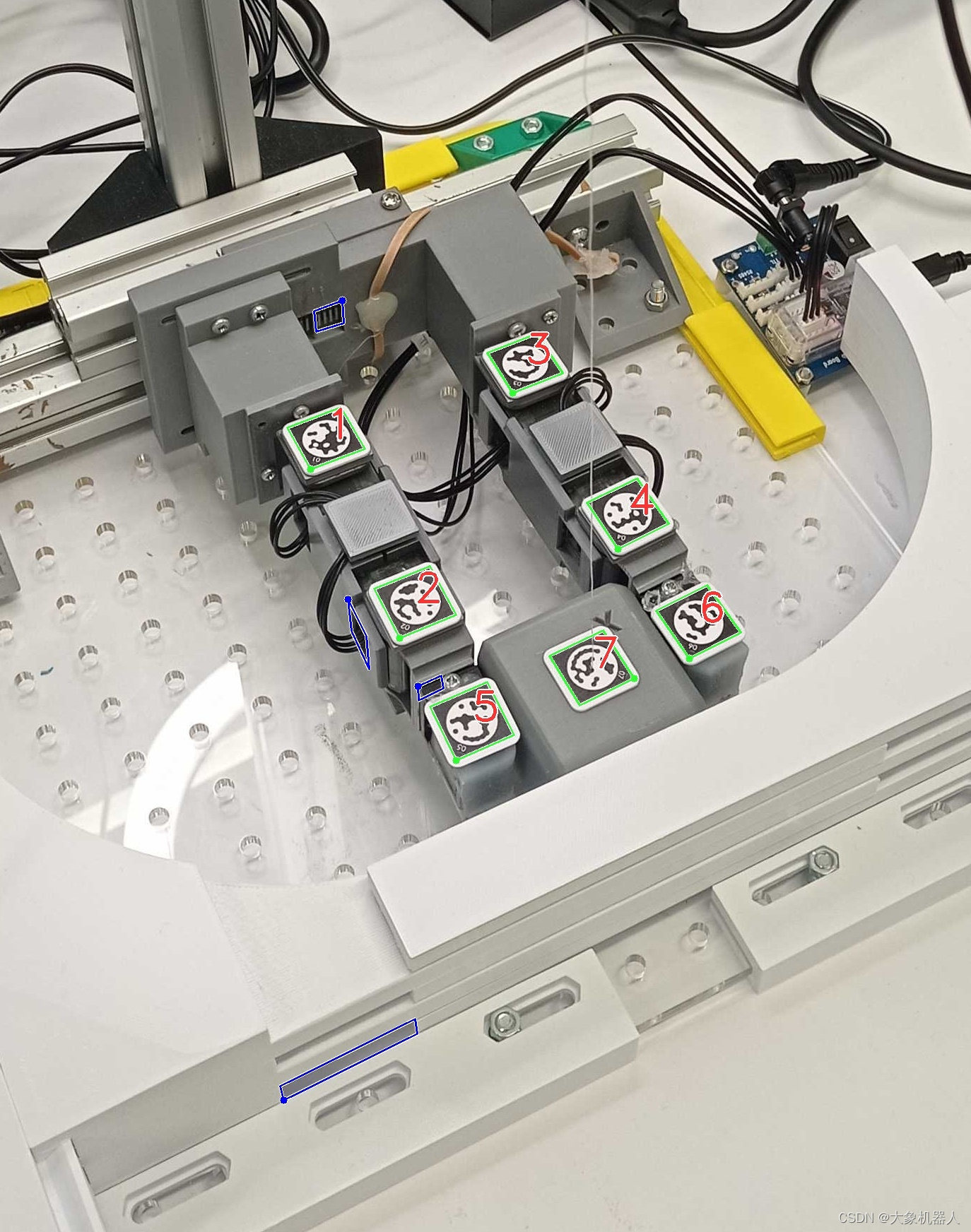
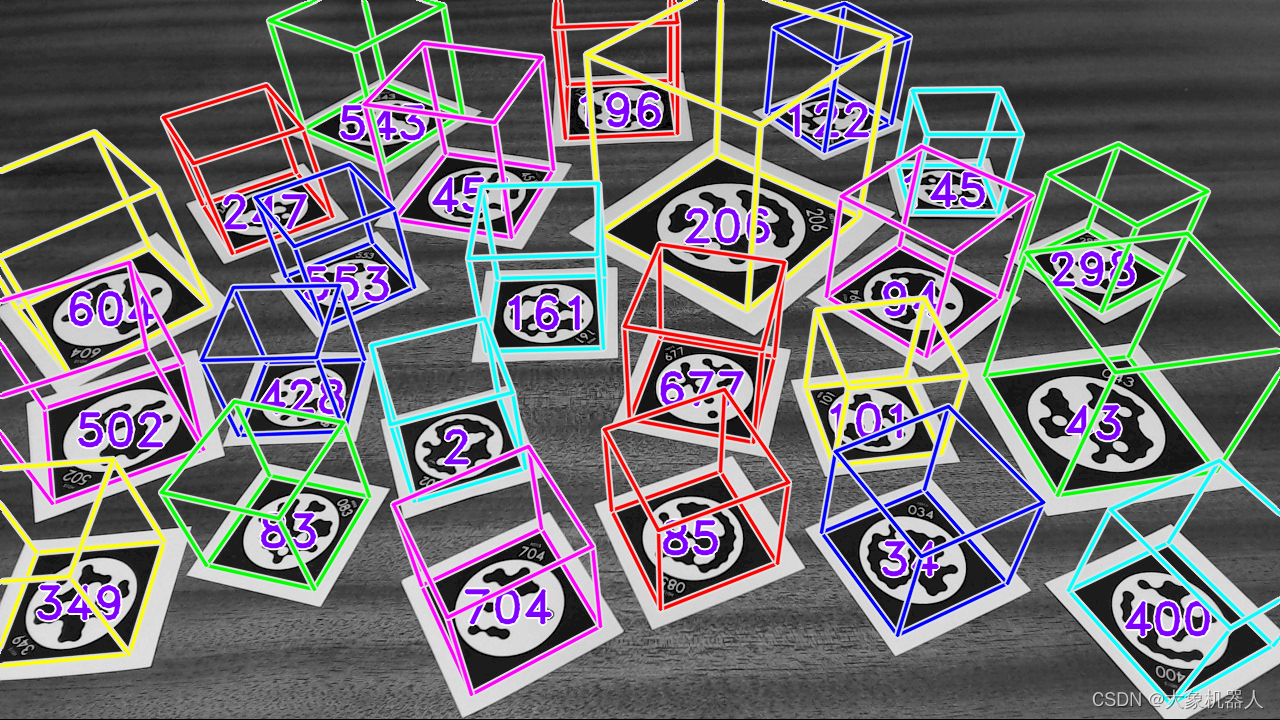
标记了STag码之后可以获得标记码四个角的参数,
(array([[[257., 368.],[185., 226.],[345., 162.],[420., 302.]]], dtype=float32),)给定坐标过后,可以用opencv的‘cv2.solvePnP'函数来计算标记相对于相机的旋转和偏移量。这个函数需要标记的3D坐标(在物理世界中的位置)和相应的2D图像坐标(即检测到的角点),以及相机的内参和畸变系数。solvePnP会返回旋转向量(rvec)和平移向量(tvec),它们描述了从标记坐标系到相机坐标系的转换。这样,就可以根据这些参数计算出标记的位置和朝向。
以下是伪代码方便理解
def estimate_pose(corners):#Do some calculations with PnP, camera rotation and offsetreturn rvec,tvecdef convert_pose_to_arm_coordinates(rvec, tvec):# 将旋转向量和平移向量转换为机械臂坐标系统中的x, y, z, rx, ry, rzreturn x, y, z, rx, ry, rzdef convert_grab(object_coord_list):#Do some calculations to convert the coordinates into grasping coordinates for the robotic armreturn grab_positioncap = cv2.VideoCapture(0)
while cap.isOpened():ret, frame = cap.read()if not ret:breakmaker = (corners, ids, rejected_corners) = stag.detectMarkers(image, 21)rvec, tvec = stag.estimate_pose(marker)object_coord_list = convert_pose_to_arm_coordinates(rvec, tvec)grab_position = convert_grab(object_coord_list)mycobot.move_to_position(grab_position)机械臂控制
以上的代码就是大概的抓取的流程,比较复杂的部分解决了,接下来我们处理机械臂的运动控制,用到的是pymycobot库
from pymycobot import MyCobot#Create an instance and link the robotic arm
mc = MyCobot('com3',115200)#Control the robotic arm with angle
mc.send_angles(angles_list,speed)#Control the robotic arm using coordinates
mc.send_coords(coords_list,speed,mode)#Control gripper,value-0~100
mc.set_gripper_value(value,speed)因为机械臂的开放接口比较多,我们只需要使用坐标控制,夹爪控制就好了。
Limo Pro 建图导航
完成了机械臂抓取部分的功能,接下来我们要实现小车的建图导航模块了。
首先我们要见图,有了地图之后才能够在地图上进行导航,定点巡航等一些的功能,目前有多种建图的算法,因为我们搭建的场景并不是很大,环境相对于静态我们选择使用gmapping算法来实现。
建图
Gmapping是基于滤波SLAM框架的常用开源SLAM算法。Gmapping有效利用了车轮里程计信息,对激光雷达的频率要求不高,在构建小场景地图时,所需的计算量较小且精度较高。这里通过使用ROS封装了的GMapping功能包来实现limo的建图。
注:以下的功能都是封装好的可以直接使用
首先需要启动雷达,打开一个新终端,在终端中输入命令:
roslaunch limo_bringup limo_start.launch pub_odom_tf:=false然后启动gmapping建图算法,打开另一个新终端,在终端中输入命令:
roslaunch limo_bringup limo_gmapping.launch成功启动之后会打开rviz可视化工具,这时候看到的界面如图
这时候就可以把手柄调为遥控模式,控制limo建图了。
构建完地图之后,需要运行以下命令,把地图保存到指定目录:
1、切换到需要保存地图的目录下,这里把地图保存到~/agilex_ws/src/limo_ros/limo_bringup/maps/,在终端中输入命令:
cd ~/agilex_ws/src/limo_ros/limo_bringup/maps/2、切换到/agilex_ws/limo_bringup/maps 之后,继续在终端中输入命令:
rosrun map_server map_saver -f map1map1为保存地图的名称,保存地图时应避免地图的名称重复
导航
前面我们用了gmapping来进行建图,我们现在来进行导航。导航的关键是机器人定位和路径规划两大部分。针对这两个核心,ROS提供了以下两个功能包。
(1)move_base:实现机器人导航中的最优路径规划。
(2)amcl:实现二维地图中的机器人定位。
在上述的两个功能包的基础上,ROS提供了一套完整的导航框架,
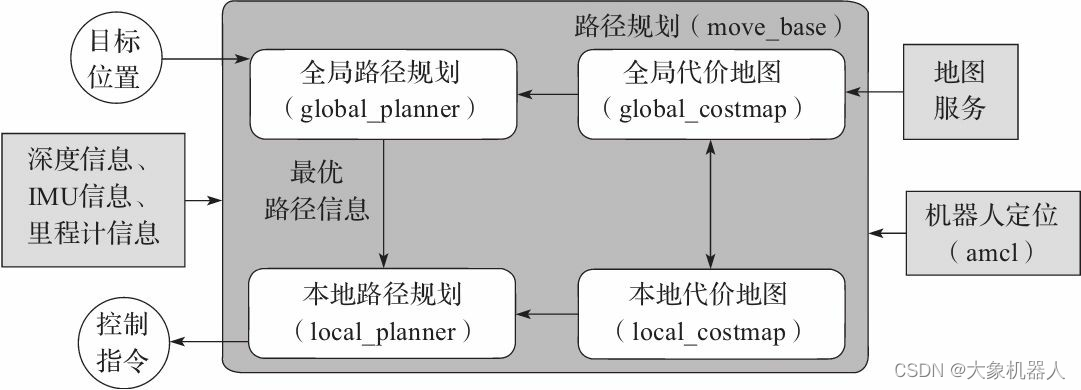
机器人只需要发布必要的传感器信息和导航的目标位置,ROS即可完成导航功能。在该框架中,move_base功能包提供导航的主要运行、交互接口。为了保障导航路径的准确性,机器人还要对自己所处的位置进行精确定位,这部分功能由amcl功能包实现。
在导航的过程中,运用了两种算法DWA和TEB算法,这两种算法分别处理全局路径和局部路径规划,来保证小车能够安全的前进到目的地,避免与障碍物发生碰撞。
(1)首先启动雷达,在终端中输入命令:
roslaunch limo_bringup limo_start.launch pub_odom_tf:=false(2)启动导航功能,在终端中输入命令:
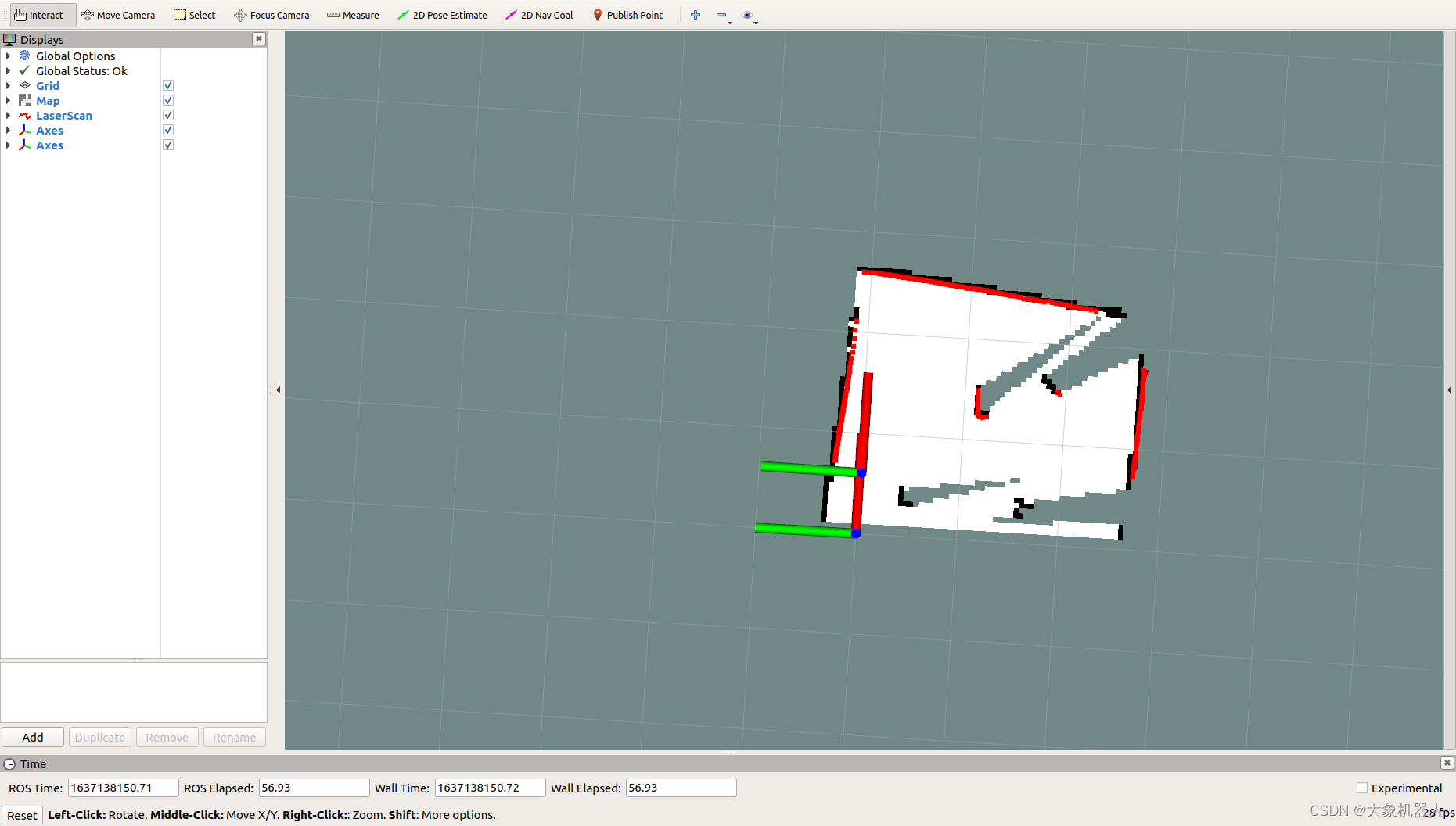
roslaunch limo_bringup limo_navigation_diff.launch启动成功之后会打开rviz界面,如图
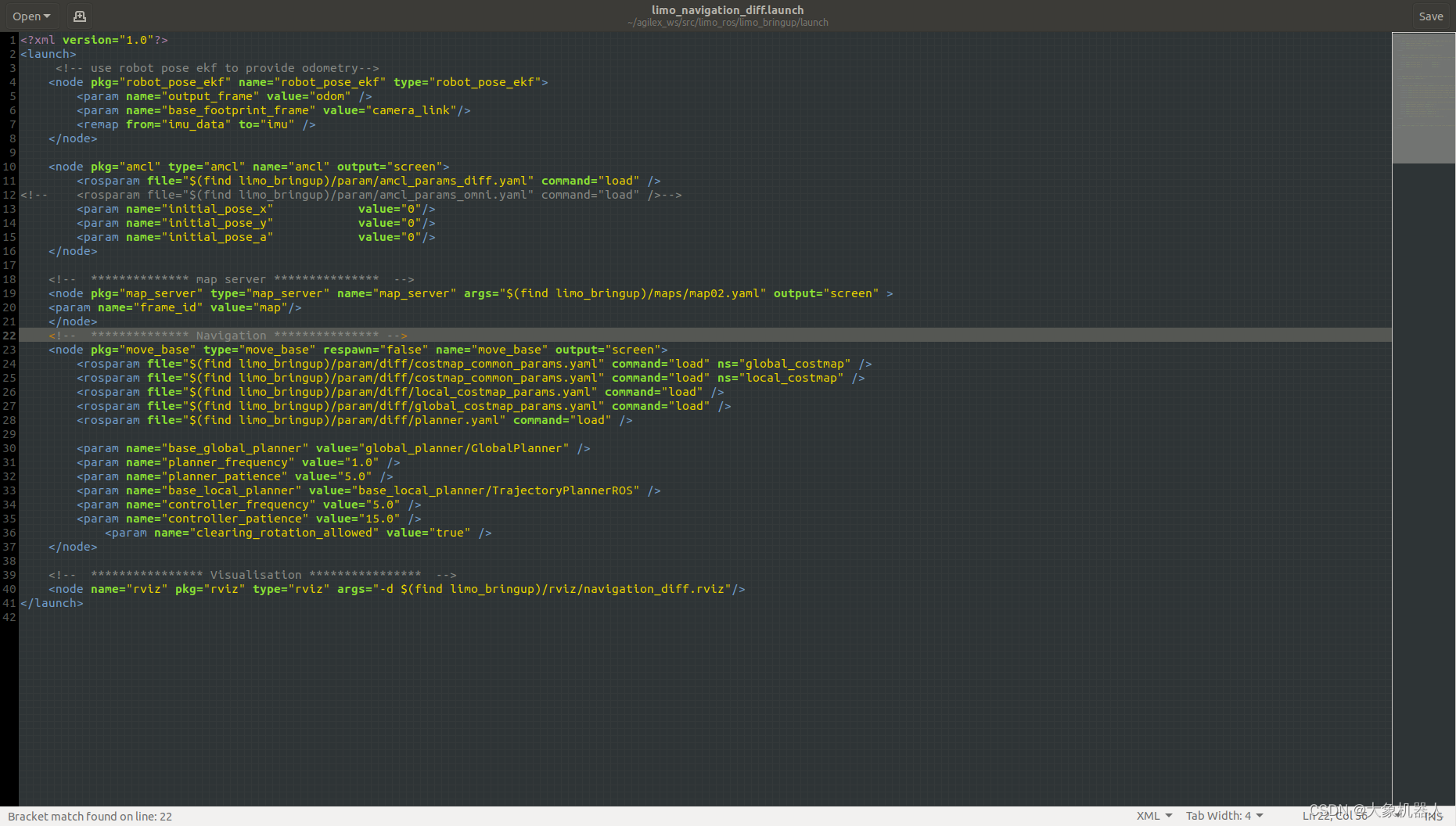
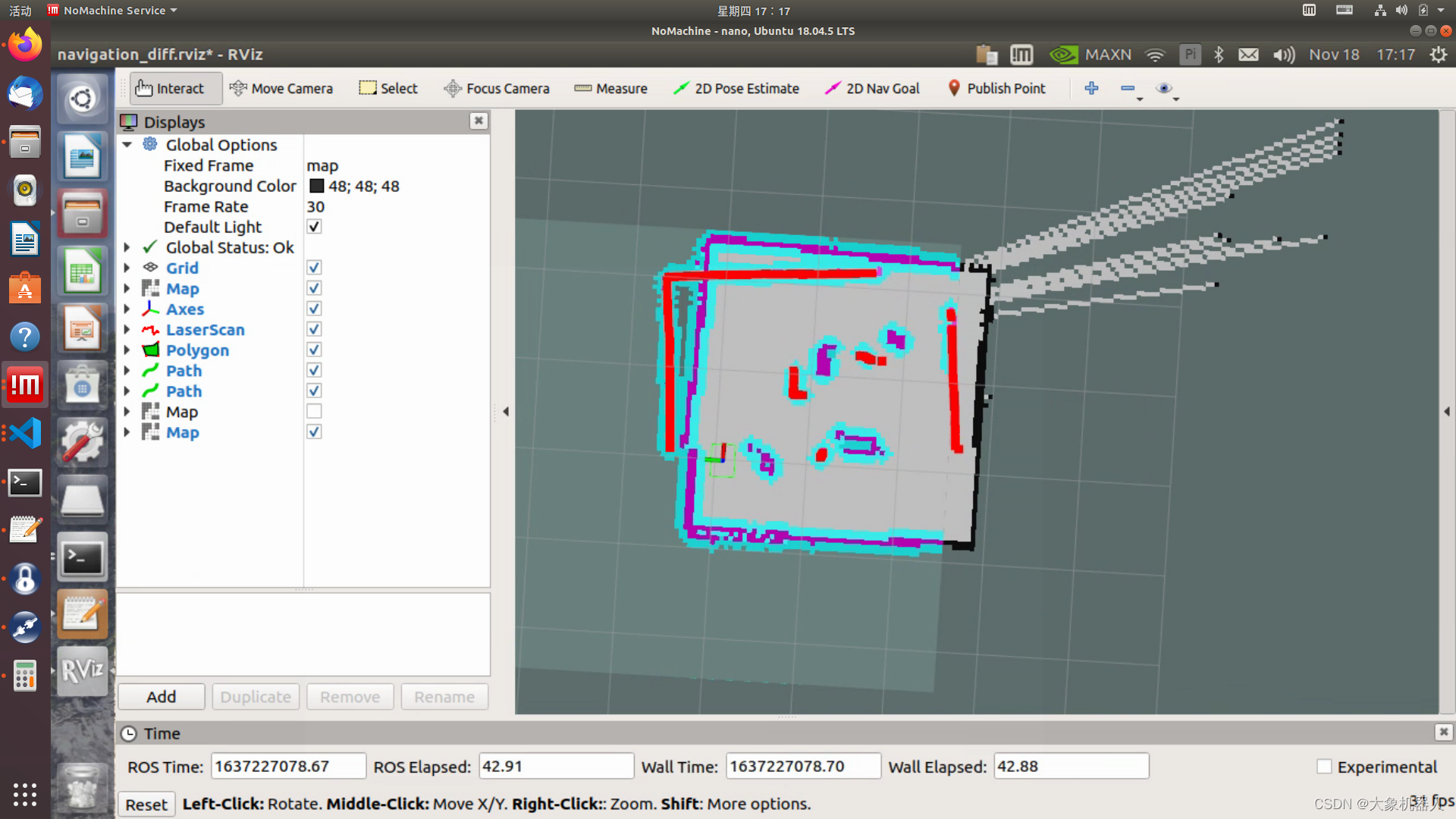 我们需要把刚才建的地图给导进去,请打开limo_navigation_diff.launch 文件修改参数, 文件所在目录为:~/agilex_ws/src/limo_ros/limo_bringup/launch。把map02修改为需要更换的地图名称。
我们需要把刚才建的地图给导进去,请打开limo_navigation_diff.launch 文件修改参数, 文件所在目录为:~/agilex_ws/src/limo_ros/limo_bringup/launch。把map02修改为需要更换的地图名称。
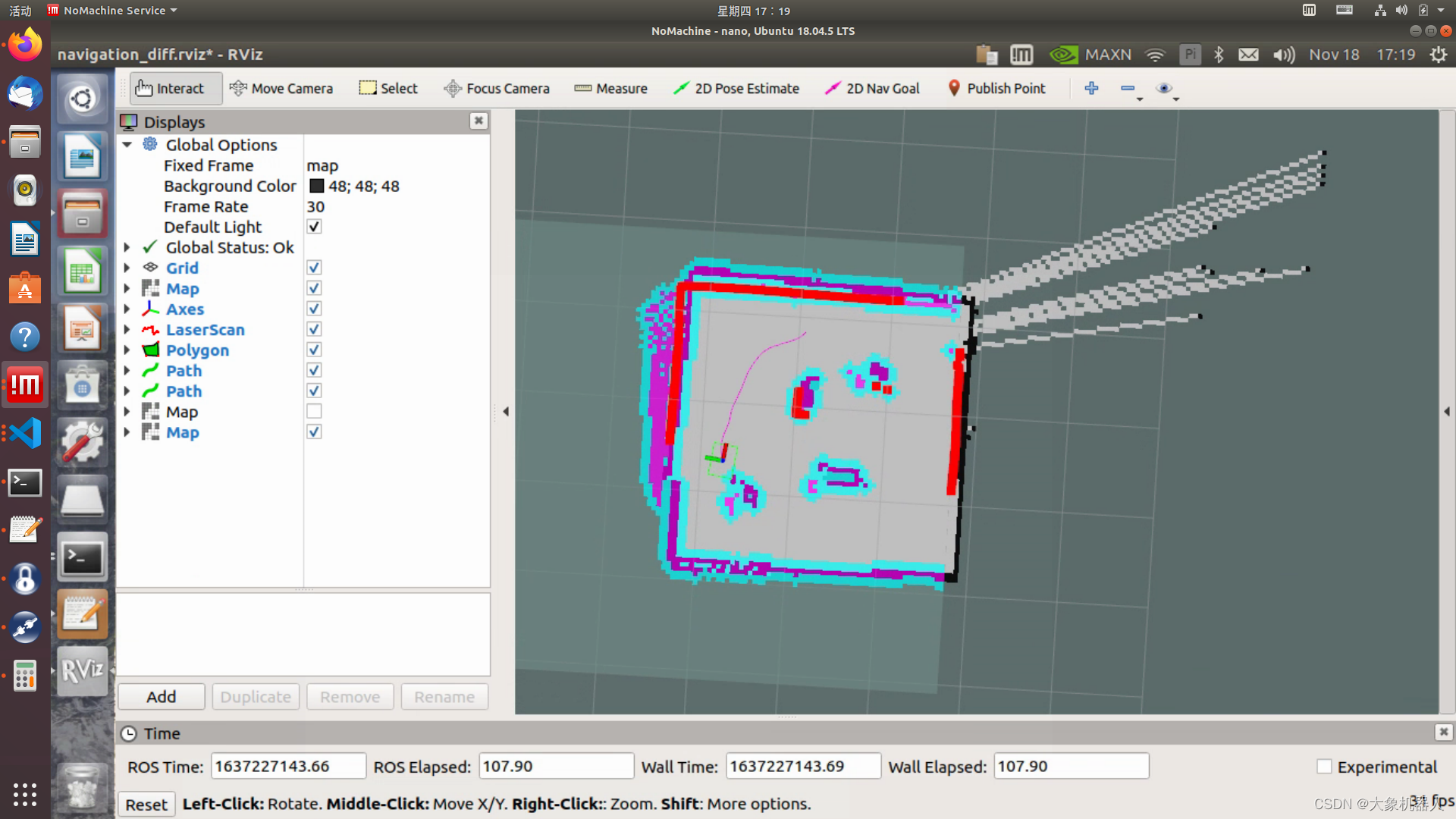
开启导航之后,会发现激光扫描出来的形状和地图没有重合,需要我们手动校正,在rviz中显示的地图上矫正底盘在场景中实际的位置,通过rviz中的工具,发布一个大概的位置,给limo一个大致的位置,然后通过手柄遥控limo旋转,让其自动校正,当激光形状和地图中的场景形状重叠的时候,校正完成。操作步骤如图 :
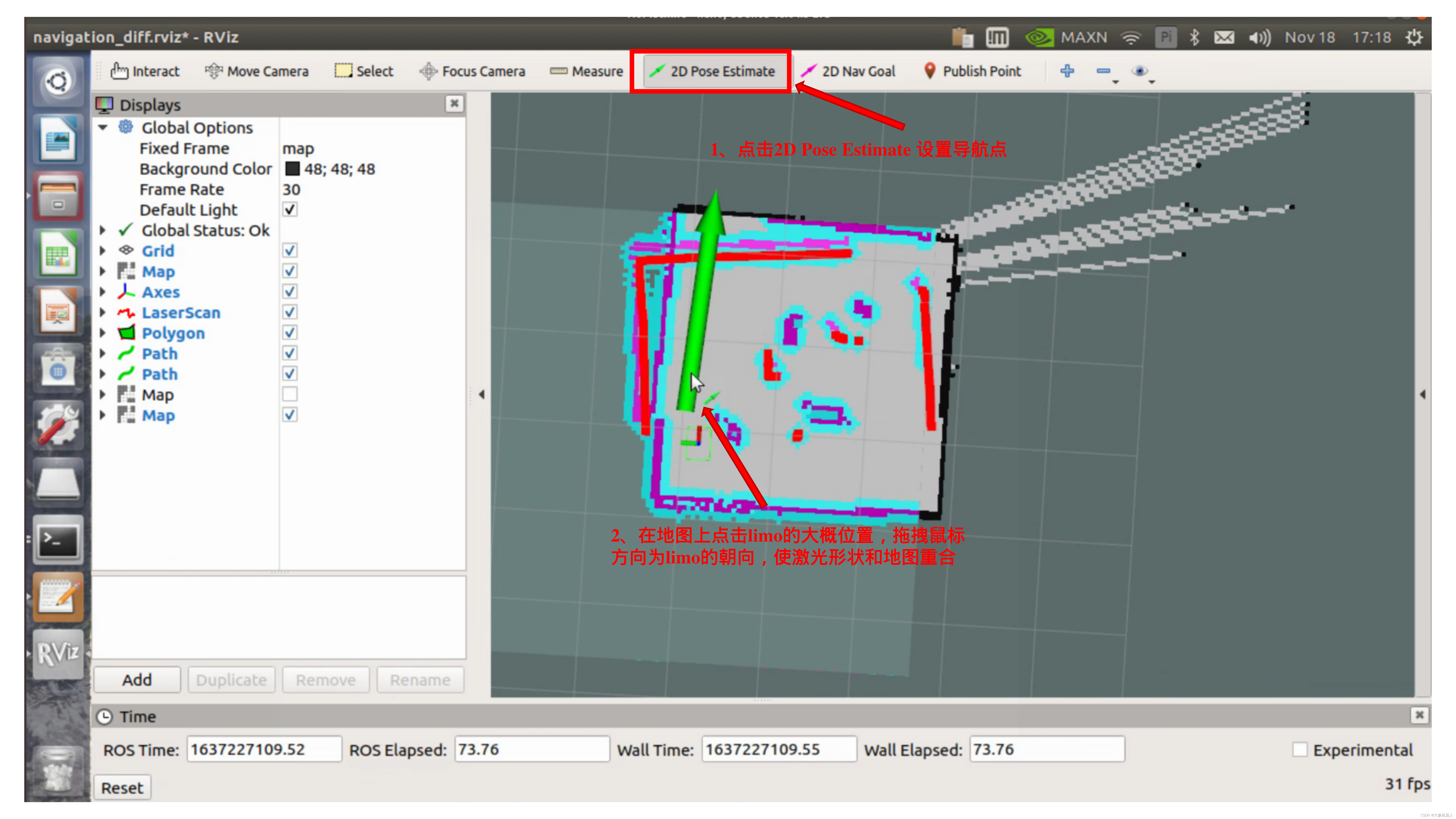
校正完成后
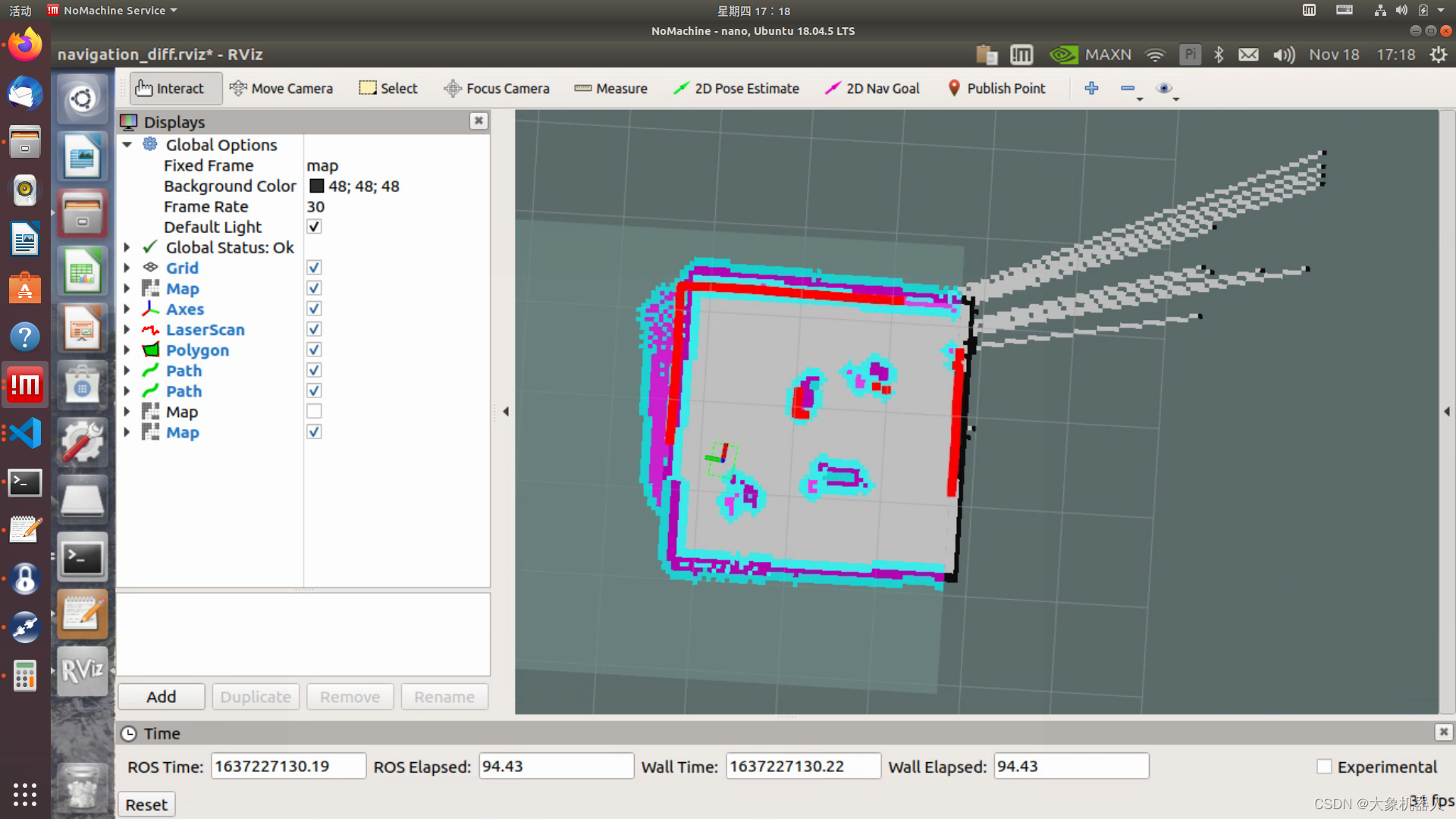
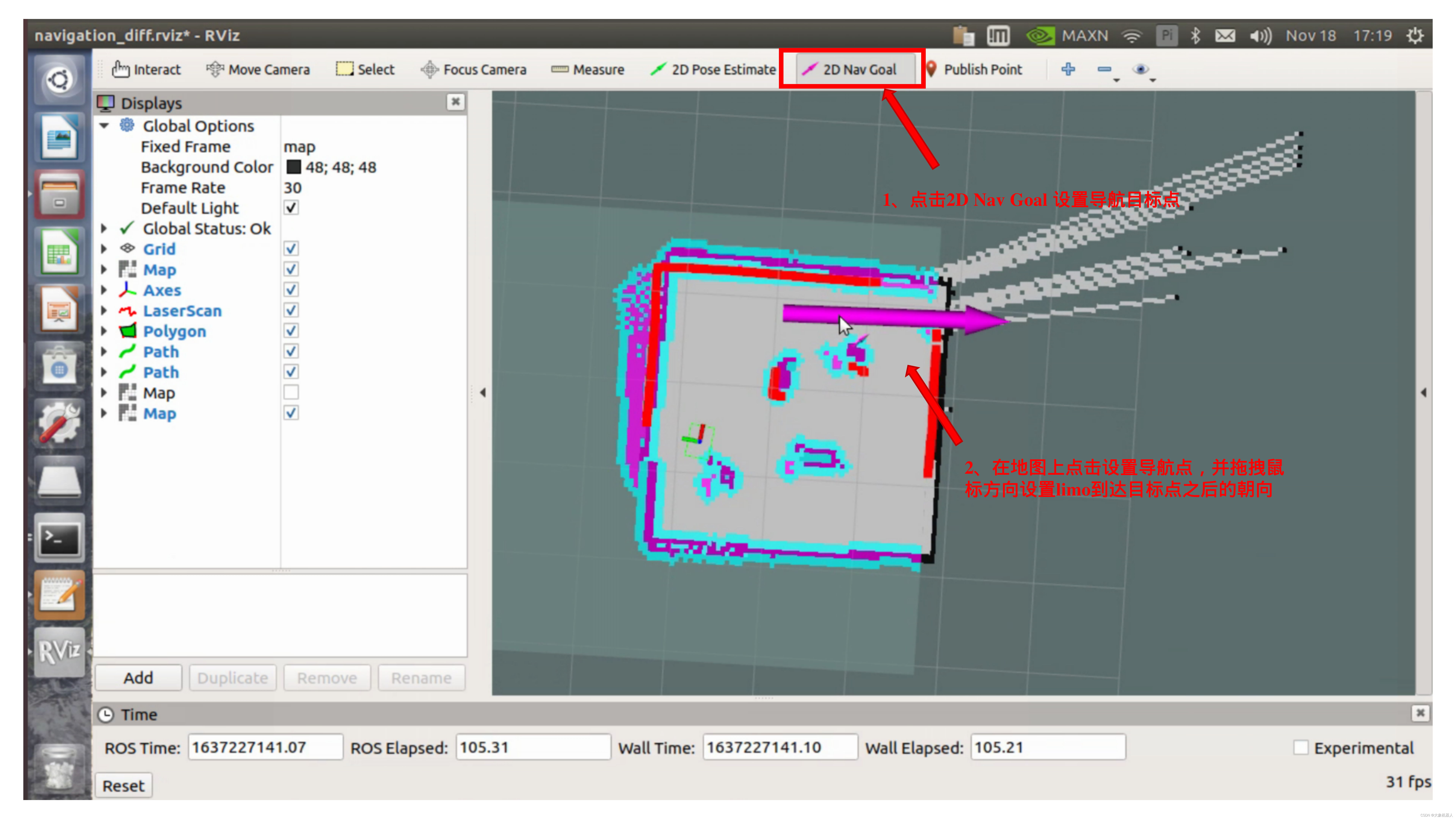
通过2D Nav Goal 设置导航目标点
路径巡检
如果要在一条路上来回运动的话,我们要启用路径巡检功能,后续会使用上这个功能。
(1)首先启动雷达,开启一个新的终端,在终端中输入命令:
roslaunch limo_bringup limo_start.launch pub_odom_tf:=false(2)启动导航功能,开启一个新的终端,在终端中输入命令:
roslaunch limo_bringup limo_navigation_diff.launch注:如果是阿克曼运动模式,请运行
roslaunch limo_bringup limo_navigation_ackerman.launch(3)启动路径记录功能,开启一个新的终端,在终端中输入命令:
roslaunch agilex_pure_pursuit record_path.launch路径记录结束之后终止路径记录程序,在终端中输入命令为:Ctrl+c
(4)启动路径巡检功能,开启一个新的终端,在终端中输入命令:
注:把手柄调至指令模式
roslaunch agilex_pure_pursuit pure_pursuit.launch两个系统的集成
上面分布完成了myCobot机械臂视觉的抓取,LIMO的建图导航,路径巡检功能,现在我们需要把它们集成在ROS系统上。我们预设的场景是,LIMO进行定点的巡检,当遇到了标志物的时候停止运动,等待机械臂执行抓取物体,完成之后LIMO移动到下一个点位。
功能节点分布
在ROS(Robot Operating System)中实现一个功能的流程涉及到多个步骤和组件,包括节点(nodes)、话题(topics)、服务(services)、参数服务器(parameter server)和动作(actions)。根据ROS的功能节点架构,我们确定了节点的分布和它们交互的方式:
1. 图像识别节点(Image Recognition Node)
- 职责:持续接收来自摄像头的图像流,使用图像识别算法(如OpenCV或深度学习模型)来检测特定的标记物。
- 输入:来自摄像头的图像流。
- 输出:当检测到标记物时,发布一个消息到一个特定的话题(如/marker_detected)。
2. 控制节点(Control Node)
- 职责:管理机器人的移动,包括启动、停止和继续巡检。
- 输入:订阅/marker_detected话题以监听图像识别节点的输出。也可能订阅一个专门用于接收手动控制指令的话题(如/control_commands)。
- 输出:向机器人底层控制系统(如驱动电机的节点)发送控制命令。
3. 任务执行节点(Task Execution Node)
- 职责:执行遇到标记物后的特定任务,这些任务可以是数据采集、状态报告等。
- 输入:监听来自控制节点的指令,这些指令指示何时开始执行任务。
- 输出:任务完成的状态反馈,可能会发送到控制节点或一个专门的状态话题(如/task_status)。
4. 导航和路径规划节点(Navigation and Path Planning Node)
- 职责:处理机器人的路径规划和导航逻辑,确保机器人可以在环境中安全移动。
- 输入:接收来自控制节点的指令,用于启动、停止或调整导航路径。
- 输出:向机器人底层控制系统发送导航指令,如目标位置、速度和方向。
总结
这个场景算是初步完成了,其实还可以添加许多细节的,比如说在行径的过程中增添一些移动的障碍物,又或者设定一个红绿灯之类的物体,更加接近真实的场景。如果你们觉得有什么需要改善的地方,又或者说你想用 LIMO cobot 来做一些什么,尽管畅所欲言,你的回复和点赞就是我们更新最大的动力!
这篇关于结合大象机器人六轴协作机械臂myCobot 280 ,解决特定的自动化任务和挑战!(下)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




