本文主要是介绍2024新算法爱情进化算法(LEA)和经典灰狼优化器(GWO)进行无人机三维路径规划设计实验,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
简介:
2024新算法爱情进化算法(LEA)和经典灰狼优化器(GWO)进行无人机三维路径规划设计实验。
无人机三维路径规划的重要意义在于确保飞行安全、优化飞行路线以节省时间和能源消耗,并使无人机能够适应复杂环境,实现特定任务。群体智能优化算法在无人机三维路径规划中扮演关键角色,其全局搜索能力允许同时考虑多个解决方案,避障优化确保路径安全,自适应性适应不同飞行任务需求,并行搜索加快最优解寻找速度。
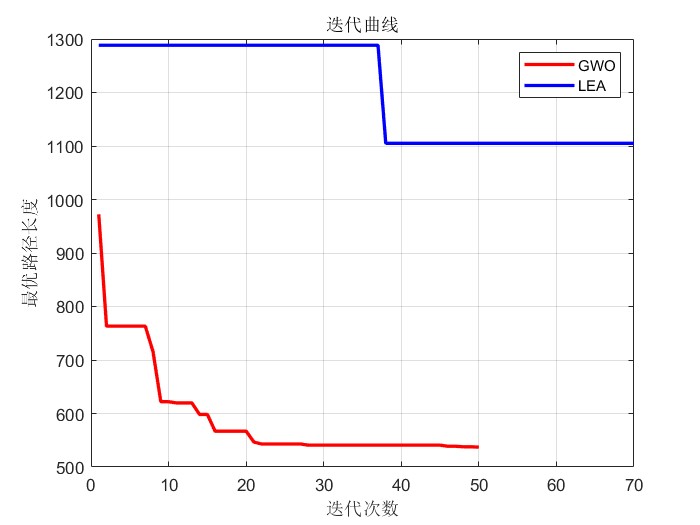
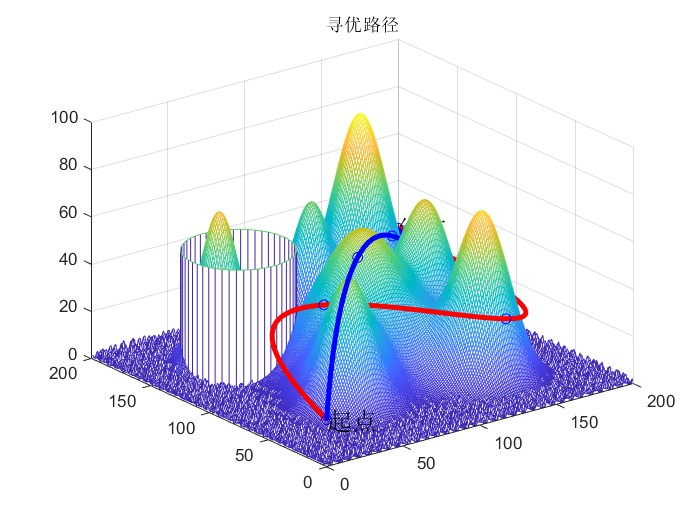
灰狼优化器(GWO)作为非常经典实用的群智能算法,在这里我们将其与2024年最新提出的爱情进化算法(LEA)进行无人机三维路径规划比较,运行结果包括最优路径和收敛曲线的比较。并附带代码,供大家学习参考!
实验结果如下:
部分主函数代码如下:
%%
clc;
clear;
close all;
%% 创建地图
%地图的大小200*200
MapSizeX = 200 ;
MapSizeY = 200;
%% 地形地图创建,地图详细参数,请去MapValueFunction.m里面设置
x = 1:1:MapSizeX;
y = 1:1:MapSizeY;
for i = 1:MapSizeXfor j = 1:MapSizeYMap(i,j) = MapValueFunction(i,j);end
end
global NodesNumber
global startPoint
global endPoint
global ThreatAreaPostion
global ThreatAreaRadius%% 威胁区域绘制
%威胁区域中心坐标
ThreatAreaPostion = [50,140];
%威胁区域半径
ThreatAreaRadius = 30;
%将威胁区域叠加到图上
figure
mesh(Map);
hold on;
for i= 1:size(ThreatAreaRadius)[X,Y,Z] = cylinder(ThreatAreaRadius(i),50);X = X + ThreatAreaPostion(i,1);Y = Y + ThreatAreaPostion(i,2);Z(2,:) = Z(2,:) + 50;%威胁区域高度mesh(X,Y,Z)
end代码获取点击:
https://mbd.pub/o/bread/ZpWUk5Zt
这篇关于2024新算法爱情进化算法(LEA)和经典灰狼优化器(GWO)进行无人机三维路径规划设计实验的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







