本文主要是介绍[定位算法]amcl(自适应蒙特卡罗定位),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
AMCL
amcl采用的是结合自适应(增强蒙特卡洛Augmented_MCL)和库尔贝克-莱不勒散度采样KLD_Sampling_MCL(蒙特卡洛定位的一个变种)。
1.KLD_Sampling_MCL随时间改变粒子数,改良了度过初期后的蒙特卡洛大样本集合的资源浪费。两个kld_配置参数就是KLD的参数。对于每次粒子滤波迭代,KLD采样以概率1-δ确定样本数(1-δ就是kld_z配置参数),使得真实的后验与基于采样的近似之间的误差小于ε(ε就是kld_err配置参数).kld_z=0.99,kld_err=0.05,直方图位大小为15cm*15cm*15°就能取得良好的结果。
2.Augmented_MCL解决的是从机器人绑架或全局定位失效中恢复的问题。两个recovery_alpha_配置参数就是用于失效恢复的。随机采样以max{0.0,1.0-w(fast)/w(slow)}概率增加。如果短期似然劣于长期似然则增加随机采样,这种方法,测量似然的一个突然衰减将引起随机采样的数目增加。w=w+α(Wavg-w)--Wavg当前测量模型的权重,w为短期(w(fast))或长期(w(slow))平滑估计,α为与w对应的recovery_alpha_参数。
订阅话题
-
/tf (tf/tfMessage):订阅了各坐标系转换的话题,用于查询各坐标系的转换。
-
/initialpose (geometry_msgs/PoseWithCovarianceStamped):用于(重新)初始化粒子滤波器的平均值和协方差,简单来理解就是先预估计一下机器人的初始位姿。
-
/amcl/map (nav_msgs/OccupancyGrid):当在launch文件中设置了use_map_topic为true时,amcl则订阅该话题获取地图,然后使用基于激光来进行定位,当然设置use_map_topic为false时不订阅该话题也是可以的。
发布话题
-
amcl_pose (geometry_msgs/PoseWithCovarianceStamped):机器人在地图上带有协方差的位姿估计,这个是话题是整个粒子滤波定位的最终输出结果,该话题输出的位姿信息是根据全局坐标系/map的坐标转换后的位置。
-
particlecloud (geometry_msgs/PoseArray):在粒子滤波器维护下的一组粒子位姿估计,可以直接在rviz中显示,查看粒子的收敛效果。
-
tf (tf/tfMessage):发布从odom坐标系到map坐标系的转换,当然该odom坐标系可以使用odom_frame_id参数来重新映射为自定义的坐标系名称。
-
scan (sensor_msgs/LaserScan):激光雷达信息。
服务
- global_localization (std_srvs/Empty):通过调用该服务将初始化全局定位,将所有的粒子重新打散随机的分散在地图的空闲地方。
- request_nomotion_update (std_srvs/Empty):该服务是手动的来更新粒子并发布新的粒子。
- set_map (nav_msgs/SetMap):amcl可以通过订阅/map话题来获取地图,如果在launch文件中设置use_map_static为false的话,就可以通过调用该服务来获取地图了,效果与订阅/map话题是一样的。
服务调用
- static_map (nav_msgs/GetMap):amcl调用此服务来检索基于激光定位的地图;启动阻止从此服务获取地图。
launch文件参数配置
<launch><!--当设置为true时,AMCL将会订阅map话题,而不是调用服务返回地图。也就是说当设置为true时,有另外一个节点实时的发布map话题,也就是机器人在实时的进行地图构建,并供给amcl话题使用;当设置为false时,通过map server,也就是调用已经构建完成的地图。--><arg name="use_map_topic" default="false"/><arg name="scan_topic" default="scan"/> <!--扫描话题--><arg name="initial_pose_x" default="0.0"/> <!--初始位姿均值x,用于初始化高斯分布滤波器--><arg name="initial_pose_y" default="0.0"/> <!--初始位姿均值y,用于初始化高斯分布滤波器--><arg name="initial_pose_a" default="0.0"/> <!--初始位姿均值(yaw),用于初始化高斯分布滤波器--><arg name="odom_frame_id" default="odom"/> <!--里程计默认坐标--><arg name="base_frame_id" default="base_link"/> <!--机器人基坐标--><arg name="global_frame_id" default="map"/> <!--全局坐标--><node pkg="amcl" type="amcl" name="amcl"><param name="use_map_topic" value="$(arg use_map_topic)"/><!-- Publish scans from best pose at a max of 10 Hz --><param name="odom_model_type" value="diff"/> <!--选择odom模型,diff差速模型,omni全向模型--><param name="odom_alpha5" value="0.1"/> <!--移相关的噪声参数(仅用于模型是“omni”的情况,默认0--><param name="gui_publish_rate" value="10.0"/> <!--扫描和路径发布到可视化软件的最大频率--><param name="laser_max_beams" value="120"/> <!--更新滤波器时,每次扫描中多少个等间距的光束被使用--><param name="laser_max_range" value="80.0"/> <!--最大扫描范围,参数设置为-1.0时,将会使用激光上报的最大扫描范围--><param name="min_particles" value="500"/> <!--滤波器中的最少粒子数,值越大定位效果越好,但是相应的会增加主控平台的计算资源消耗--><param name="max_particles" value="5000"/> <!--滤波器中最多粒子数,是一个上限值--><param name="kld_err" value="0.05"/> <!--真实分布与估计分布之间的最大误差--><param name="kld_z" value="0.99"/> <!--上标准分位数(1-p),其中p是估计分布上误差小于kld_err的概率--><param name="odom_alpha1" value="0.2"/> <!--机器人运动部分的旋转分量估计的里程计旋转的期望噪声--><param name="odom_alpha2" value="0.2"/> <!--机器人运动部分的平移分量估计的里程计旋转的期望噪声--><!-- translation std dev, m --><param name="odom_alpha3" value="0.8"/> <!--机器人运动部分的平移分量估计的里程计平移的期望噪声--><param name="odom_alpha4" value="0.2"/> <!--机器人运动部分的旋转分量估计的里程计平移的期望噪声--><param name="laser_z_hit" value="0.5"/> <!--模型的z_hit部分的混合权值--><param name="laser_z_short" value="0.05"/> <!--模型的z_short部分的混合权值--><param name="laser_z_max" value="0.05"/> <!--模型的z_max部分的混合权值--><param name="laser_z_rand" value="0.5"/> <!--模型的z_rand部分的混合权值--><param name="laser_sigma_hit" value="0.2"/> <!--被用在模型的z_hit部分的高斯模型的标准差--><param name="laser_lambda_short" value="0.1"/> <!--模型z_short部分的指数衰减参数--><param name="laser_model_type" value="likelihood_field"/> <!--激光模型类型定义,可以是beam, likehood_field, likehood_field_prob--><!-- <param name="laser_model_type" value="beam"/> --><param name="laser_likelihood_max_dist" value="2.0"/> <!--地图上做障碍物膨胀的最大距离--><param name="update_min_d" value="0.2"/> <!--在执行滤波更新前平移运动的距离--><param name="update_min_a" value="0.4"/> <!--执行滤波更新前旋转的角度--><param name="odom_frame_id" value="$(arg odom_frame_id)"/> <param name="base_frame_id" value="$(arg base_frame_id)"/> <param name="global_frame_id" value="$(arg global_frame_id)"/><param name="resample_interval" value="0.5"/> <!--在重采样前需要滤波更新的次数--><!-- Increase tolerance because the computer can get quite busy --><param name="transform_tolerance" value="0.1"/> <!--tf变换发布推迟的时间--><param name="recovery_alpha_slow" value="0.0"/> <!--慢速的平均权重滤波的指数衰减频率,用作决定什么时候通过增加随机位姿来recover--><param name="recovery_alpha_fast" value="0.0"/> <!--快速的平均权重滤波的指数衰减频率,用作决定什么时候通过增加随机位姿来recover--><<param name="initial_pose_x" value="$(arg initial_pose_x)"/><param name="initial_pose_y" value="$(arg initial_pose_y)"/><param name="initial_pose_a" value="$(arg initial_pose_a)"/><remap from="scan" to="$(arg scan_topic)"/></node>
</launch>
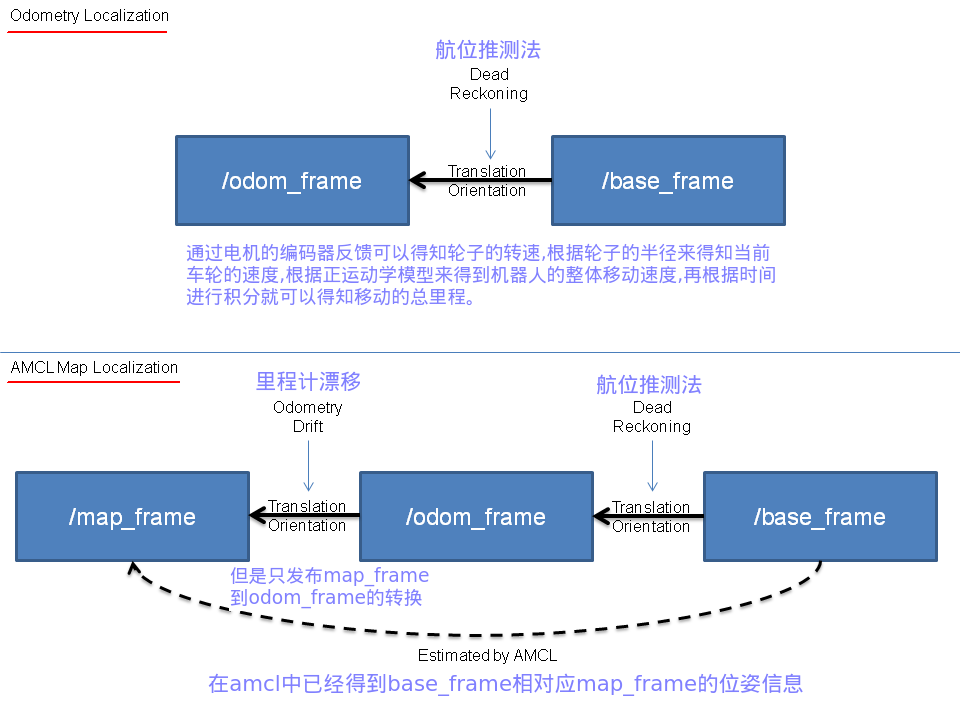
Odometry Localization和AMCL Map Localization比较
这篇关于[定位算法]amcl(自适应蒙特卡罗定位)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







