本文主要是介绍路径规划 | 基于蜣螂优化算法的无人机三维路径规划(Matlab),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 效果一览
- 基本介绍
- 程序设计
- 参考文献
效果一览
基本介绍
基于蜣螂优化算法的无人机三维路径规划【23年新算法应用】可直接运行 Matlab语言
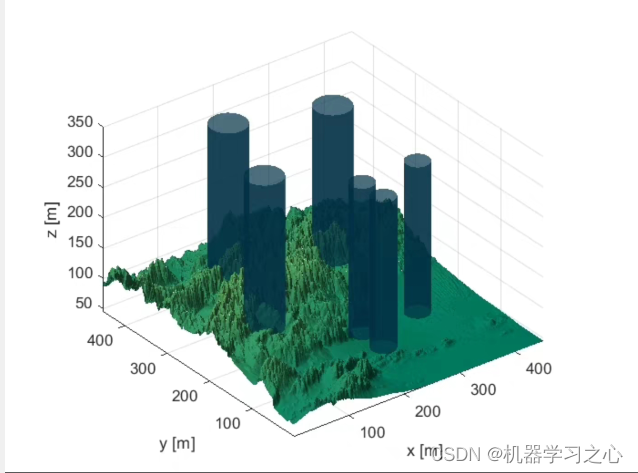
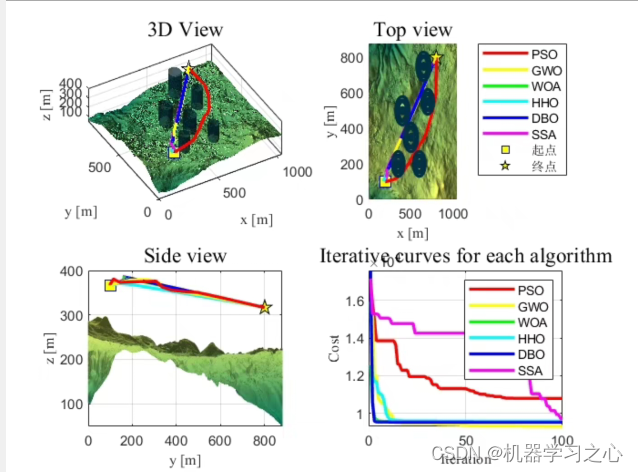
1.读取地形数据,利用蜣螂算法DBO优化三维路径,目标函数为总路径最短,同时不能撞到障碍物,效果如图所示,包括迭代曲线图、三维路径图、二维平面图等等~
2.优化算法光做测试函数容易受到质疑,这里可作为各类优化算法的应用,也可定制改进各类优化算法.
3.注释清晰,适合新手小白[火]
4.附赠示例地形数据,直接运行main即可一键出图.
程序设计
- 完整源码和数据私信博主回复基于蜣螂优化算法的无人机三维路径规划(Matlab)
clc;clear;close all;
% Experimental result parameters
% Ll = Path length; Tt = Time; Node = Number of nodes
% All_Iterations = Iterations
Ll = []; Tt = []; Node = []; Cut_L=[]; All_Iterations = []; %-------------------------------------
load MAP.mat; %这里可以替换为自己的地图矩阵
m = size(MAP,1);
n = size(MAP,2);global obs
global obs_new
obs_index=[];
for index=1:m*nif ~MAP(index)obs_index(end+1)=index;end
end
for k=1:length(obs_index)[x,y]=ind2sub(size(MAP), obs_index(k)); obs(k,1)=x;obs(k,2)=y;
endobs = [obs(:,2),m-obs(:,1)];obs = obs*1000/m;obs(:,3) = 1000/m;
obs(:,4) = 1000/m;
%-------------------------------------for j=1:1:2 % 运行次数% 设置参数p=0.3; % 模板偏差概率start_pose =[0,0]; % 起点global goal_pose;goal_pose = [999,999]; % 目标点global step;step = 20; global kp; % 引力系数kp=1;global p0; % 斥力最大作用范围p0 = 250;global krep; % 斥力系数
参考文献
[1] 基于人工势场结合快速搜索树APF+RRT实现机器人避障规划附matlab代码
[2] 基于蚁群算法求解栅格地图路径规划问题matlab源码含GUI
这篇关于路径规划 | 基于蜣螂优化算法的无人机三维路径规划(Matlab)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







