本文主要是介绍工业机器人——搬运机器人,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
搬运机器人为应用机器人运动轨迹实现代替人工搬运的自动化产品,是可以进行自动化搬运作业的工业机器人。搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动。广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。

搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学,机械学,电器液压气压技术,自动控制技术,传感器技术,单片机技术和计算机技术等学科领域,已成为现代机械制造生产体系中的一项重要组成部分。
相关知识
1、组成
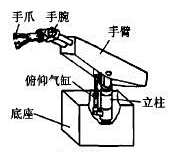
2、工作原理
1、通过检测吸盘或机械手末端夹具和平衡气缸内气体压力,能自动识别机械手臂上有无载荷,并经气动逻辑控制回路自动调整平衡气缸内的气压,达到自动平衡的目的。
2、工作时,重物犹如悬浮在空中,可避免产品对接时的碰撞,智能机械。
3、在机械手臂的工作范围内,操作人员可将其前后左右上下轻松移动到任何位置,人员本身可轻松操作。同时,气动回路还有防止误操作掉物和失压保护等连锁保护功能。
4、非常重要的一点是,气动平衡吊整机无须电控系统,只需压缩空气和真空源(视工作情况)即可工作,非常方便。

3、主要特点
1、占地面积少。
2、结构简单、零部件少。
3、能耗低。
3、适用性强。
5、全部控制可在控制柜屏幕上操作即可,操作非常简单。
6、只需定位抓起点和摆放点,示教方法简单易懂。

4、发展趋势
搬运机器人的强劲表现,与其广泛的市场需求密不可分。众所周知,物料搬运是一项无处不在的日常工作,存在于各行各业间,但看似不起眼的简单工作背后,却有着长期性、基础性的企业需求,还时常受到人员、成本及效率等因素的限制,在这样的情况下,搬运机器人大有可为。

这篇关于工业机器人——搬运机器人的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









