本文主要是介绍斯坦福团队开发智能盲杖,搭载激光雷达,可探测障碍规划路线,完全开源可在家DIY...,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

来源:大数据文摘本文约1300字,建议阅读6分钟
本文介绍了斯坦福团队最新开发的智能盲杖。
拐杖大家都见过,简单来说就是一根棍子。

后来为了方便人们的需要,拐杖集成的功能越来越多。

现在,拐杖已经开始智能化了。自动驾驶汽车上的技术被搬到了拐杖上,可以帮助人们探测和识别障碍物,并且在室内和室外都能追踪路线。
所以,这已经不是一根普通的拐杖,而是一根智能盲杖。
这款智能盲杖来自斯坦福大学智能系统实验室(Stanford University Intelligent Systems Laboratory),该研究成果发表在《Science Robotics》杂志上。

论文的第一作者帕特里克·斯莱德(Patrick Slade)说,“我们想要的是更加方便用户使用的东西,而不仅仅是个白色的拐杖,它不仅能告诉你有一个物体挡住了你的去路,还能告诉你那个物体是什么,然后帮助你绕过它。”
论文地址:
https://www.futurity.org/blindness-white-cane-smart-technology-robotics-2643062/
搭载激光雷达、GPS,可根据目标实时导航
因为不清楚周围的环境,盲人只能小心翼翼走路。
如果路前面有个台阶,走的太快就会被绊倒,所以只能靠手中的盲杖一点一点敲击来感受,这个范围最多只能覆盖到周围一米左右。
那怎么能探测到更远的距离呢?自动驾驶汽车上的雷达或许是个好方法。
这个想法并非斯坦福大学的这个团队首创,这款盲杖也不是第一款智能盲杖,只不过,此前研发的带传感器的盲杖重量可能达到50磅,成本将近6000美元,没什么实用价值。
但是斯坦福大学团队研制的这一款盲杖,采用的传感器重量只有3磅,并且成本也大幅降低到400美元。
这款盲杖装备有一个激光雷达,一个GPS定位系统,另外还有加速计、磁力计和陀螺仪,就像一款智能汽车的简化版一样,可以实时输出用户的位置、速度、方向等信息。
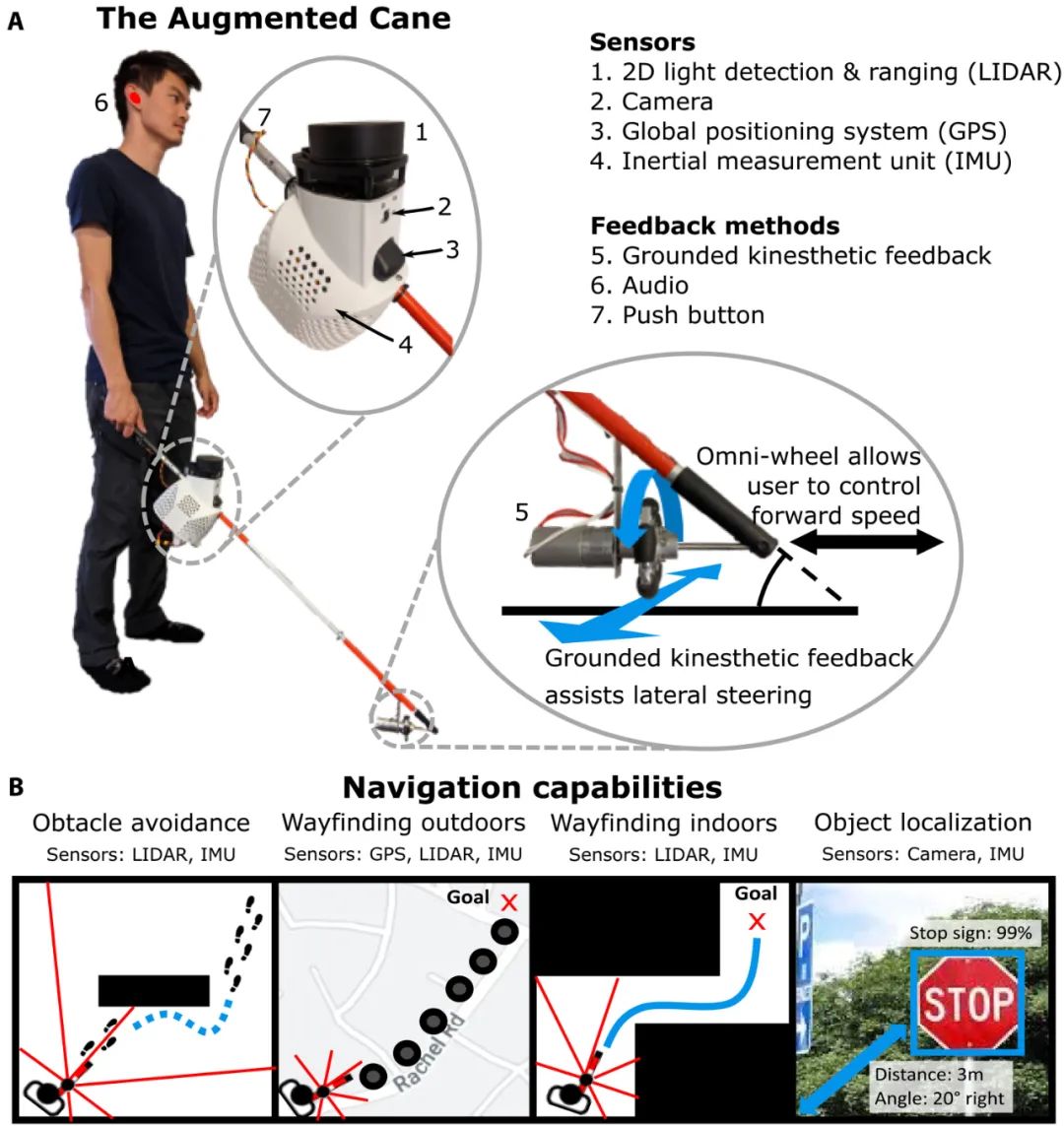
这款使用基于人工智能寻路和机器人算法,比如即时定位与地图构建(SLAM)和视觉伺服来做出决定ーー引导用户走向地图中的一个目标。
盲杖的顶端还安装了一个电动的、360转向的轮子,可以时刻保持与地面的接触。这个轮子通过轻轻的推动可以就可以实现前后左右移动,引导视力受损的用户绕过障碍物。

硬件、软件都开源,可在家DIY
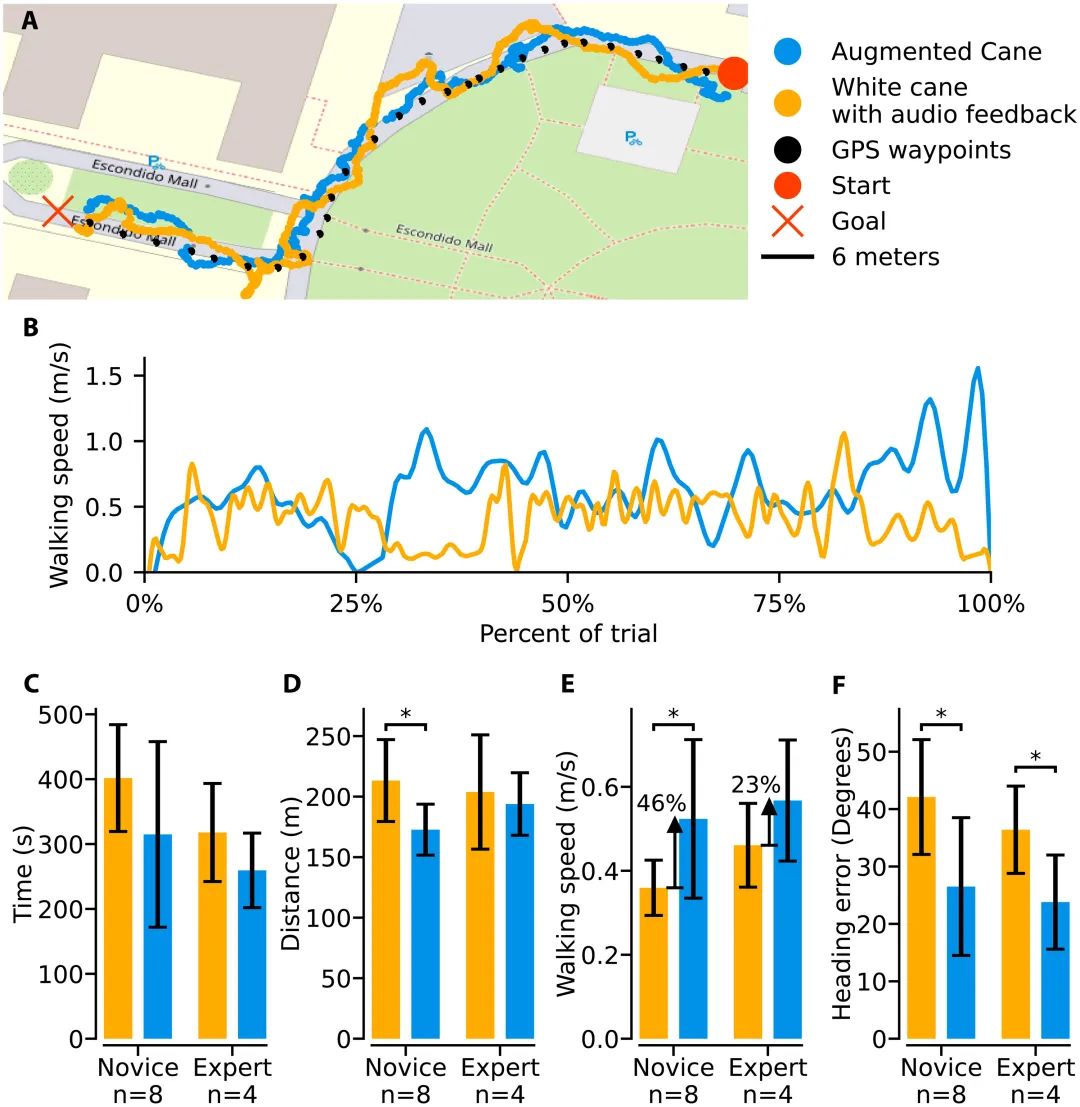
研究人员将增强手杖放在视力受损者和戴眼罩的视力正常者的手中。然后,他们被要求完成日常的导航挑战ーー走过走廊、避开障碍物和走过户外标志点。
在实地测试中,视力受损的参与者的行走速度就提高了大约20% 。对于戴着眼罩的视力正常的人来说,结果更加令人印象深刻,他们的速度提高了三分之一以上。
为了让更多人能够从这个项目收益,降低这款盲杖的使用成本,研究人员开源了项目的每一个方面,包括软件和硬件,该文件附有可下载的零件清单和如何用这些零件自己在家DIY的说明书。
作者表示,“我们希望优化这个项目,以便于复制和降低成本。任何人都可以免费下载所有的代码、材料清单和电子原理图。
但是Kochenderfer也补充说,这种手杖仍然只是一个研究原型。他表示: “在增强型手杖能够投入日常使用之前,还需要进行大量重要的工程和实验。”Kochenderfer表示他和团队欢迎工业界的合作伙伴提高设计效率,扩大生产规模,让这款增强型手杖更加经济实惠。
该团队的下一步工作包括对原型进行改进,并开发一种使用日常智能手机作为处理器的模型,这一进步可以改善功能,扩大技术的使用范围,并进一步降低成本。
相关报道:
https://www.futurity.org/blindness-white-cane-smart-technology-robotics-2643062/
https://www.science.org/doi/10.1126/scirobotics.abg6594
编辑:王菁

这篇关于斯坦福团队开发智能盲杖,搭载激光雷达,可探测障碍规划路线,完全开源可在家DIY...的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







