本文主要是介绍【钟表识别】基于matlab GUI形态学钟表识别【含Matlab源码 1351期】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。
🍎个人主页:海神之光
🏆代码获取方式:
海神之光Matlab王者学习之路—代码获取方式
⛳️座右铭:行百里者,半于九十。
更多Matlab仿真内容点击👇
Matlab图像处理(进阶版)
路径规划(Matlab)
神经网络预测与分类(Matlab)
优化求解(Matlab)
语音处理(Matlab)
信号处理(Matlab)
车间调度(Matlab)
⛄一、形态学检测简介
1 图像分析及预处理
拍摄图像会产生随机的扰动,图像有一定的噪声,为消除掉图像中的无关信息,对图像进行预处理。
1.1 灰度化
为降低运算量,需要将拍摄的三通道的RGB图像转化为单通道的灰度图像。采用加权平均法的灰度化方法,其中心理学灰度公式根据人眼对RGB三色的敏感程度选择不同的权重:

式(1)中,R、G、B分别为RGB三通道灰度值,灰度化结果如图1 (a)所示。
1.2 平滑处理
为了尽可能避免将背景当作缺陷,需要对图像进行平滑处理,这样虽然会使缺陷的边界模糊,但是有利于减少背景的干扰。注意所采用的去噪处理为均值滤波,均值滤波公式为:

式(2)中,m、n分别为所选择的滤波核的长和宽,Sxy是以(x,y)为中心的滤波核对应像素的位置集合,平滑处理结果如图1 (b)所示。均值滤波的缺点是会使一些细节如边缘等信息丢失,因此在找到种子点后,对没有经过平滑处理的图像进行区域生长,找到缺陷边界。
2 算法原理
2.1 阈值分割
阈值分割是图像分割中最简单、基础的方法,性能比较稳定,计算量较小,运算速度快;它主要有全局阈值分割、局部阈值分割、自适应阈值分割等方法。阈值算法基于阈值T,将像素灰度值大于阈值T和小于阈值T的部分分别叫做前景和背景。变换函数表达式:
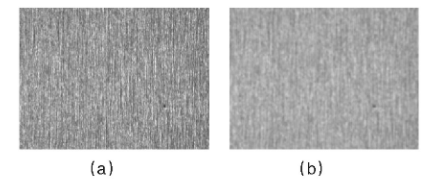
图1 均值滤波处理

式(3)中,T为阈值,g (x,y)为原图像像素点(x,y)的灰度值,f (x,y)为分割后图像像素点(x,y)的灰度值,阈值分割结果如图2所示。

图2 阈值分割结果
2.2 形态学开运算降噪
数学形态学简称形态学,其处理方式为领域运算,即把领域结构元素与图像对应位置像素进行逻辑运算,这种运算的影响因素主要有结构元素大小、形状和逻辑运算的规则。形态学操作主要有膨胀、腐蚀、梯度运算、礼帽运算、黑帽运算、开运算和闭运算等,但其基础为腐蚀和膨胀,利用膨胀和腐蚀就能完成不同形式的运算。
腐蚀运算能消除轮廓边界点,使边界向内缩小,主要用于细化二值图像目标轮廓、去除噪声等。

式(4)中,A为原图像,B为结构元素。首先给结构元素B定义一个原点,当结构元素B的原点移动到图像A的(x,y)上时,如果结构元素B上等于1的像素点对应图像A也等于1,则将图像A的(x,y)的灰度值置为1,否则置为0,腐蚀示意图如图3所示。

图3 腐蚀示意图
膨胀运算则与腐蚀运算相反,使边界向外扩张,主要用于填补图像分割后的空白,使相近的不相连的轮廓相连。其公式为:

式(5)中,A为原图像,B为结构元素。首先给结构元素B定义一个原点,当结构元素B的原点移动到图像A的(x,y)上时,如果结构元素B上等于1的像素点对应图像A中至少有一个等于1,则将图像A的(x,y)的灰度值置为1,否则置为0。
先进行腐蚀操作,然后在腐蚀的基础上进行膨胀操作,主要用于去噪和计数等。其公式为:

式(6)中,A为原图像,B、C为结构元素。开运算效果如图4所示,图5为开运算处理的结果。

图4 开运算效果
2.3 区域生长法
区域生长的思想就是把领域(四领域、八领域等)相同的化为一个区域。首先需要一个种子点作为生长的开始,然后将种子点领域内满足相似准则要求的像素点合并到种子的区域,将这个区域的像素做为种子点,继续进行生长,直到没有符合要求的点,生长结束,所有种子点像素作为生长的区域。分割的好坏由初始种子点和相似准则决定。

图5 形态学开运算结果
2.3.1 种子点选择与检测
经过阈值分割和形态学处理后,将二值图像各轮廓中心作为待定种子点。如果选择的种子点位于缺陷的绝对区域,那么种子点总有一个方向各像素的深度值呈现高-低-高的形态。设计检测模板如图6所示,计算出种子点在0°、45°、90°、135°方向上的深度变化,判断其变化是否呈高低高形态。
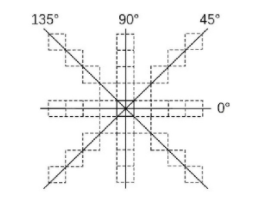
图6 检测模板
种子点左右两侧r个像素的灰度平均值分别为:

各方向的灰度变化为:

深度形Si态变化判定:

式(10)中,I (u)为检测模板中第u个像素的灰度值,w=1,2,3,4,分别代表0°,45°,90°,135°方向,mwm为w方向两侧的最小灰度值,T1为形态变化阈值。如果种子点不满足深度形态变化判定,则去除该待定种子点。
2.3.2 生长过程
区域生长的具体流程如下:
(1)将种子点坐标放入种子点集seeds。
(2)顶出种子点集中的一个种子点,对种子点八邻域的像素点进行相似准则判断;满足相似准则条件的点,视为种子点放入种子点集seeds。
(3)将顶出的种子点存入种子集S。
(4)如果种子点集内没有元素,则跳到步骤(4);如果种子点集中还有元素,则跳到步骤(2)。
(5)生成一张和输入图像长宽一致,像素值全为0的图像I。
(6)将图像I中对应种子集S坐标的像素值置为255,得到分割图像I’。
其中生长的相似准则为:

式(11)中,gray (seed)为当轮种子点的灰度值,gray (8_n)为其八邻域各点的像素值,Thresh为设置的阈值。区域生长结果如图7所示。

图7 区域生长结果
3 实验过程
图像分割就是按照预先设定的规则,将图像分割为有意义的前景和背景的过程。区域生长是一个分割效果比较好的算法,但前提是需要找到适合的种子点。单一的分割算法就容易遇到这种不足的情况,结合使用形态学和阈值分割的方法来找到合适的种子点,帮助区域生长算法完成分割任务,达到满足要求的分割效果,分割方法流程如图8所示。

图8 分割流程图
首先对输入的图片进行灰度化处理,变成单通道的灰度图片,然后滤波去除噪声,使图像更平滑,选择合适的阈值进行阈值分割,在利用开运算去除掉分割后较小的前景,以各前景区域的中心点为起始种子点,进行区域生长,得到最终所满足要求的前景。
⛄二、部分源代码
function varargout = clockread(varargin)
% CLOCKREAD MATLAB code for clockread.fig
% CLOCKREAD, by itself, creates a new CLOCKREAD or raises the existing
% singleton*.
%
% H = CLOCKREAD returns the handle to a new CLOCKREAD or the handle to
% the existing singleton*.
%
% CLOCKREAD(‘CALLBACK’,hObject,eventData,handles,…) calls the local
% function named CALLBACK in CLOCKREAD.M with the given input arguments.
%
% CLOCKREAD(‘Property’,‘Value’,…) creates a new CLOCKREAD or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before clockread_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to clockread_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE’s Tools menu. Choose “GUI allows only one
% instance to run (singleton)”.
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help clockread
% Last Modified by GUIDE v2.5 08-Jun-2021 11:12:46
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct(‘gui_Name’, mfilename, …
‘gui_Singleton’, gui_Singleton, …
‘gui_OpeningFcn’, @clockread_OpeningFcn, …
‘gui_OutputFcn’, @clockread_OutputFcn, …
‘gui_LayoutFcn’, [] , …
‘gui_Callback’, []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% — Executes just before clockread is made visible.
function clockread_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to clockread (see VARARGIN)
% Choose default command line output for clockread
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes clockread wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% — Outputs from this function are returned to the command line.
function varargout = clockread_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% — Executes on button press in pushbutton1.clockreader
function pushbutton1_Callback(hObject, eventdata, handles)
[filename, filepath] = uigetfile(‘.jpg;.png;*.bmp’,'璇烽?鎷╀竴骞呭浘鍍?);
filepath = [filepath, filename];
[time_clock] = read(filepath)
pic = imread(filepath);
imshow(pic);
title(filename,‘color’,‘r’);
res = time_clock;
set(handles.edit1, ‘string’, res)
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
function edit1_Callback(hObject, eventdata, handles)
% 缁撴灉鍥炶皟
% hObject handle to edit1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,‘String’) returns contents of edit1 as text
% str2double(get(hObject,‘String’)) returns contents of edit1 as a double
% — Executes during object creation, after setting all properties.
function edit1_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,‘BackgroundColor’), get(0,‘defaultUicontrolBackgroundColor’))
set(hObject,‘BackgroundColor’,‘white’);
end
function [finallines,longest,newcenter] = getarrows(I,edges,center,maxxy,minxy)
%convert image to gray
I = rgb2gray(I);
I = imadjust(I);
%get hough lines
[H, theta, rho] = hough(edges);
peaks = houghpeaks(H,70,'threshold',ceil(0.01*max(H(:))));
lines = houghlines(edges, theta, rho, peaks,'FillGap',15,'MinLength',40);min_len = 0.1*min(maxxy - minxy);
max_len = 0;
newlines = struct('point1',{},'point2',{});
i=1;
newcenter = zeros(1,2);
%get closer center
for k = 1:length(lines)D1 = [lines(k).point1;center];D2 = [lines(k).point2;center];if xor(pdist(D1) <= min_len , pdist(D2) <= min_len)i = i+1;if(pdist(D1) <= min_len)newcenter = newcenter + lines(k).point1;elsenewcenter = newcenter + lines(k).point2;endendxy = [lines(k).point1; lines(k).point2];len = norm(lines(k).point1 - lines(k).point2);if ( len > max_len)max_len = len;longestxy = xy;longest = lines(k);end
end%new center
newcenter = newcenter/(i-1);
min_len = min_len/2;
max_len = 0;
i=1;%lines close to the new center
for k = 1:length(lines)D1 = [lines(k).point1;newcenter];D2 = [lines(k).point2;newcenter];if xor(pdist(D1) <= min_len , pdist(D2) <= min_len)newlines(i).point1 = lines(k).point1;newlines(i).point2 = lines(k).point2;if(pdist(D1) <= min_len)newlines(i).point1 = newlines(i).point2newlines(i).point2 = newcenter;elsenewlines(i).point2 = newcenter;endxy = [newlines(i).point1; newlines(i).point2];len = norm(newlines(i).point1 - newlines(i).point2);if ( len > max_len)max_len = len;longestxy = xy;longest = newlines(i);endi=i+1;end
end
⛄三、运行结果


⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]姚河花,田玉才,旦多杰,祝小兰.基于Hough变换的指针式钟表自动识别算法[J].青海大学学报. 2022,40(04)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
🍅 仿真咨询
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化
2 机器学习和深度学习方面
卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM、XGBOOST、TCN实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
3 图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
4 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划、天线线性阵列分布优化、车间布局优化
5 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配
6 无线传感器定位及布局方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化
7 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化
8 电力系统方面
微电网优化、无功优化、配电网重构、储能配置
9 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长
10 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合
这篇关于【钟表识别】基于matlab GUI形态学钟表识别【含Matlab源码 1351期】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








